浅读《视觉SLAM十四讲:从理论到实践》--操作1--初识SLAM
Posted 林先森_007
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了浅读《视觉SLAM十四讲:从理论到实践》--操作1--初识SLAM相关的知识,希望对你有一定的参考价值。
下载《视觉SLAM十四讲:从理论到实践》源码:https://github.com/gaoxiang12/slambook
第二讲:初识SLAM
2.4.2 Hello SLAM(书本P27)
1、从github上下载源码,并解压
Ubuntu上,解压zip,先找到zip文件所在位置,然后运行下面代码,进行解压。
unzip slambook-master.zip
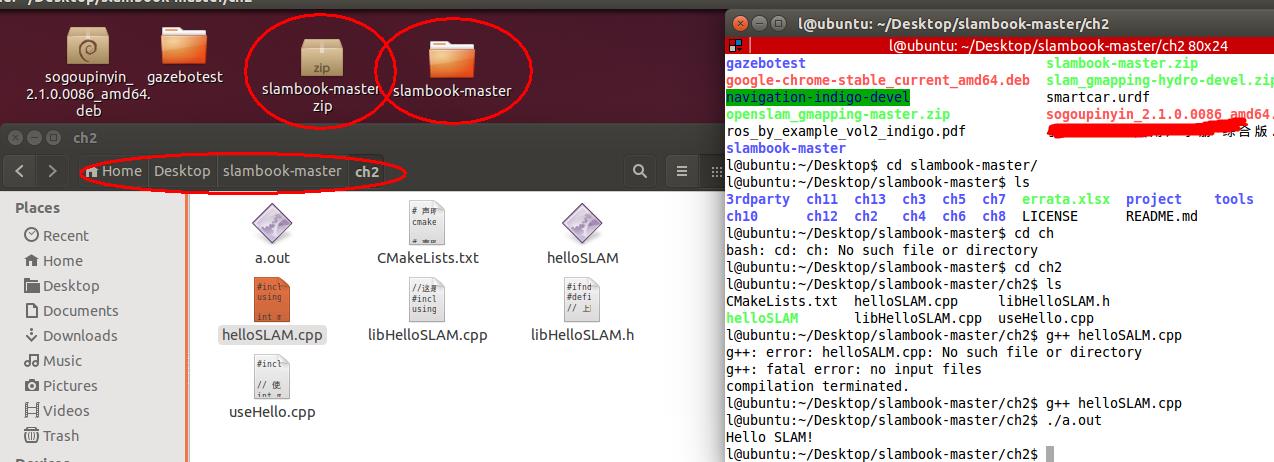
解压后,找到ch2文件夹,在文件夹中找到helloSLAM.cpp文件
运行cpp文件
g++ helloSLAM.cpp
如未安装g++,则执行下述代码
sudo apt-get install g++
运行helloSLAM.cpp后,文件夹中会出现a.out文件
在终端输入下面代码,即可实现输出:Hello SLAM!
./a.out
2.4.3使用cmake
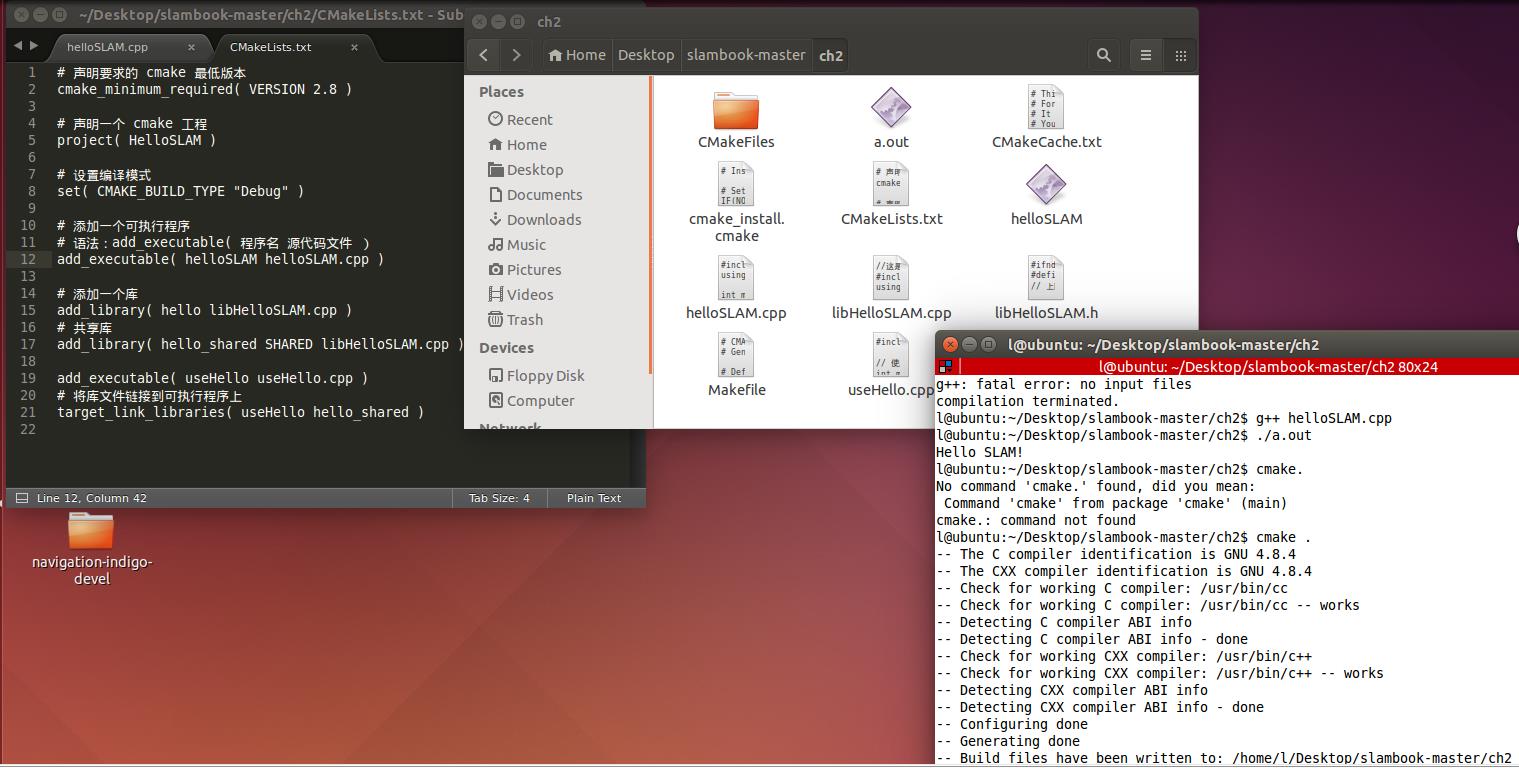
2.4.2采用的是g++,2.4.3采用的是cmake-make
Ubuntu 14.04 安装Kdevelop
http://www.cnblogs.com/lvchaoshun/p/6250649.html
以上是关于浅读《视觉SLAM十四讲:从理论到实践》--操作1--初识SLAM的主要内容,如果未能解决你的问题,请参考以下文章