怎样使用PLC的步进指令啊?????
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了怎样使用PLC的步进指令啊?????相关的知识,希望对你有一定的参考价值。
参考技术A 指令动作点
作用
ANB
局部电路之串联
AND
PORTNUM
A
接点串联电路
ANI
PORTNUM
B
接点串联电路
BINBCD
S_8
将S_8之HEX转成BCD输出至Y0-Y7(共8位元)
BINBCD2
S_8
将S_8之HEX转成BCD输出至Y0-Y9(共10位元)
CC
POINT
呼叫副程式
有
CC
则必须有
FEND,副程式须在
FENDC
之后
CHG
ADDR,1STEP,ALL
由资料ADDR第一个步进点1STEP,送至Y815之变化ALL可为2
4
8
CHGZ
DD1,BIT8
由外部
DD1
第
BIT8
笔取出资料,送至Y815
CHG7
ADDR,1STEP,LOOPNUMBER
LOOPNUMBER
是多少次才显示一次
七节显示器
CHG7Z
DD7,BIT8
由外部
DD7
第
BIT8
笔取出资料,送至
七节显示器,ALL一般为2的倍数
CHGSP
ADDR,1STEP,ALL
由资料ADDR第一个步进点1STEP,送至SPK之变化
ALL一般为2的倍数,ADDR
均须设定在
FEND之后,用
DB定义
CHGSPZ
DDSP,BIT8
由外部
DDSP
第
BIT8
笔取出资料,送至
SPK
CJ
POINT
跳至指标
有
CJ
则必须有
FEND,指标须在
FENDC
之后
CLOCK
OUTPORT,ONTIME,OFFTIME
使
OUTPORT
闪(以
.01
为一单位)使用T9
T10
CLOCK1
OUTPORT,ONTIME,OFFTIME
使
OUTPORT
闪(以
.01
为一单位)
使用T11
T2
CMP
S_8,N1,PORTNUM
将S_8
与N1
比较相同定PORTNUM(N1为8位元资料)
CMP8
S1_8,N1,S2_8,N2
将S1_8
与N1
比较相同定S2_8=N2(N1
N2为8位元资料)
COUNTER
N,V,S_16
LD
CK1
LD
C0
计数器回路
N是号码,V是计数值(如V=0则S_16是16位元可变值)
COUNTER
0,100
FEND
主程式结束指令,副程式或资料须在
FEND
之后
FLASH0
OUTPORT,ONTIME,OFFTIME,N,VARS
使
OUTPORT
闪
N
次后自停
闪完会自行使C10=1(内部使用
C10
T11-12)
FLASH1
OUTPORT,ONTIME,OFFTIME,N,VARS
使
OUTPORT
闪
N
次后自停
闪完会自行使C11=1(内部使用
C11
T13-14)
FLASH8
OUTPORT,ONTIME,OFFTIME,N,VARS
LD
X0
(范例(闪5次后停)
SET
M0
LD
M0
FLASH
Y8,9,9,5
自动将
W
之内容显示至
LED及使OUTPORT闪N次后停闪完会自行使C10=1(内部使用
C10
T11-12)
LED
会占用
Y0-Y7
之位置(以
.01
为一单位)
如
W=0
但不显示
0
时则不能用FLASH
N为8位元,如N=0则VARS是16位元可变值
LD
PORTNUM
电路开始之
A
接点
LDI
PORTNUM
电路开始之
B
接点
MC
主控电路开始,后之接点须用
LD或LDI起始,有MC则要有MCR
MCR
主控电路结束
ONOFF
PORTNUM
使
PORTNUM
反相
OR
PORTNUM
A
接点并联电路
ORB
局部电路之并联
ORI
PORTNUM
B
接点并联电路
RETS
步进点结束,回至最前母线
OUT
PORTNUM
驱动输出线圈指令
RISE
PORTNUM,TEMP
产生一脉冲(上升微分)
RST
PORTNUM
指定
OFF并保持
SET
PORTNUM
指定
ON
并保持
SETD
S_16,DATANUM
设定S_16
资料(16
BIT)
SETDOH
发
DO音(高音)
SETDOL
发
DO音(低音)
SETFA
发
FA音
SETLA
发
LA音
SETLED
DATANUM
使
DATANUM
显示至
LED
SETMI
发
MI音
SETRE
发
RE音
SETS
NUMBER
跳至步进点(最多有
256
个步进点)
SETSI
发
SI音
SETSO
发
SO音
SETW
S_8,DATANUM
设定S_8
资料(8
BIT)
SETY07
NUMBER
指定
NUMBER
给
Y0-Y7
并保持
SETY815
NUMBER
指定
NUMBER
给
Y8-Y15
并保持
STL
NUMBER
步进点(有
STL步进点就有
RETS
步进点结束)
STOP
停止发音
TIMER
N,V,S_16
计时器回路(0.1
Sec
为单位)
N是号码,V是计数值(如V=0则S_16是16位元可变值
TIMERH
N,V,S_16
计时器回路(0.01
Sec
为单位)
N是号码,V是计数值(如V=0则S_16是16位元可变值
WDEC
S_8
使S_8
减一
WDECLP
S1_8,ALL,S2_8
使S1_8
减一,如果S1_8=0
则重回
ALL-1
开始
如
ALL=0则S1_8与VS2_8比较
WINC
S_8
使S_8
加一
WINCLP
S1_8,ALL,S2_8
使S1_8
加一,如果S1_8=ALL
则重回
0
开始
如
ALL=0则S1_8与S2_8比较
WLED
S_8
使S_8
显示至
LED
西门子PLC中啥叫PID指令啊?
请问有谁能告诉我PID指令是什么意思?
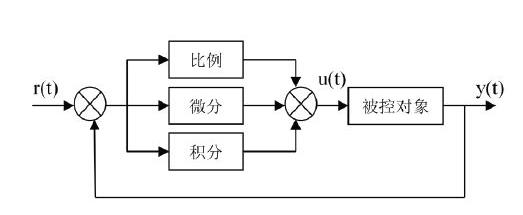
PID(比例+积分+微分)算法控制。
PID回路指令,对模拟量进行PID控制十分方便。PID指令使用的算法:( n SP 为第n个采样时刻的给定值,n为过程变量值,MX 为积分项值)PID 指令根据表格(TBL)中的输入和配置信息对引用LOOP执行PID 循环计算。
在实际控制过程中,无论是给定量还是过程量都是工程实际值,它们的取值范围都是不相同的。因此在进行PID运算前,必须将工程实际值标准化。PLC 在对模拟量进行PID运算后,对输出产生的控制作用是在[0.0,1]范围的标准值,不能驱动实际的驱动装置,必须将其转换成工程实际值。
扩展资料
PID的特点
1、PID应用范围广
虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了。
2、PID参数较易整定
也就是,PID参数Kp,Ti和Td可以根据过程的动态特性及时整定。如果过程的动态特性变化,例如可能由负载的变化引起系统动态特性变化,PID参数就可以重新整定。
3、PID控制器在实践中也不断的得到改进
PID在控制非线性、时变、耦合及参数和结构不确定的复杂过程时,工作得不是太好。最重要的是,如果PID控制器不能控制复杂过程,无论怎么调参数都没用。
参考资料来源:百度百科—PID控制
参考技术A PID指比例积分微分,Proportion比例,Integration积分,Differentiation微分西门子PLC编程软件中有PID向导,程序中的PID程序块可利用s7-Micro/win程序中的“工具”→“指令向导”生成。根据向导的提示可以对死区、报警、手动等功能进行选择,可以对设定范围、P、I、D等参数进行设定(完成后还可以利用向导进行更改)。根据提示完成设定后会自动生成一个子程序和一个中断程序,在主程序或其他程序中调用PID子程序就可以实现PID调节功能。需要更详细的说明可以直接察看编程软件的帮助文档,那里说明的还是比较详细的。
PID控制说明:
在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
比例(P)控制 :比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差。
积分(I)控制 :在积分控制中,控制器的输出与输入误差信号的积分成正比关系。对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统。为了消除稳态误差,在控制器中必须引入“积分项”。积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
微分(D)控制 :在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。其原因是由于存在有较大惯性组件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后于误差的变化。解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性。
西门子PID各参数的解释
COM_RST :=初试化
MAN_ON :=手动
PVPER_ON:=过程变量外设接通
P_SEL :=比例分量接通
I_SEL :=积分分量接通
INT_HOLD:=积分分量保持
I_ITL_ON:=积分分量初始化接通
D_SEL :=微分分量接通
CYCLE :=采样时间
SP_INT :=内部设定值
PV_IN :=过程变量输入
PV_PER :=过程变量外设输入
MAN :=手动值
GAIN :=比例增益
TI :=复位时间
TD :=微分时间
TM_LAG :=微分分量的滞后时间
DEADB_W :=死区宽度
LMN_HLM :=被控量上限
LMN_LLM :=被控量下限
PV_FAC :=过程变量系数
PV_OFF :=过程变量偏移量
LMN_FAC :=被控量系数
LMN_OFF :=被控量偏移量
I_ITLVAL:=积分分量初始值
DISV :=干扰变量
LMN :=被控量
LMN_PER :=被控量外设
QLMN_HLM:=被控量上限值到达
QLMN_LLM:=被控量下限值到达
LMN_P :=比例分量
LMN_I :=积分分量
LMN_D :=微分分量
PV :=过程变量
ER :=误差信号本回答被提问者采纳 参考技术B 好像是s_otd吧?这个是西门子的延时接通计时器指令,一般都是指令上测都是填t1-t255,不能是别的
预设值时间应该是s5#time
2s等格式的。一般在多重调用的功能块是不能用这个指令的,都用ton(库文件里边的)。因为这个是系统固有的定时器,好像只有255个!慎用!! 参考技术C 您是不懂PID的含义吗?
PID是一种闭环控制方式。P代表比例调节,影响系统的快速性;I代表积分调节,消除系统的稳态误差;D代表微分调节,对系统的状态有一个预测的作用(一般不用,条不好的话会造成系统震荡)。
我不知道您说的PLC是S7-300吗?它是调用FB41实现PID的。
希望我的解释对您有所帮助 !
以上是关于怎样使用PLC的步进指令啊?????的主要内容,如果未能解决你的问题,请参考以下文章
三菱plc中对于步进指令是当第一个状态到第二个状态的时候第一个状态自动复位吗