基于python的opencv中SGBM立体匹配算法实现
Posted 小张Tt
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于python的opencv中SGBM立体匹配算法实现相关的知识,希望对你有一定的参考价值。
文章目录
前言
SGBM的核心是SGM算法,自OpenCV2.4.6开始就已经被开源,非常的方便,并被广泛使用。
一、SGBM和SGM的区别?
参考大佬的文章:立体匹配算法推理笔记 - SGBM算法(一)
【算法】OpenCV-SGBM算法及源码的简明分析
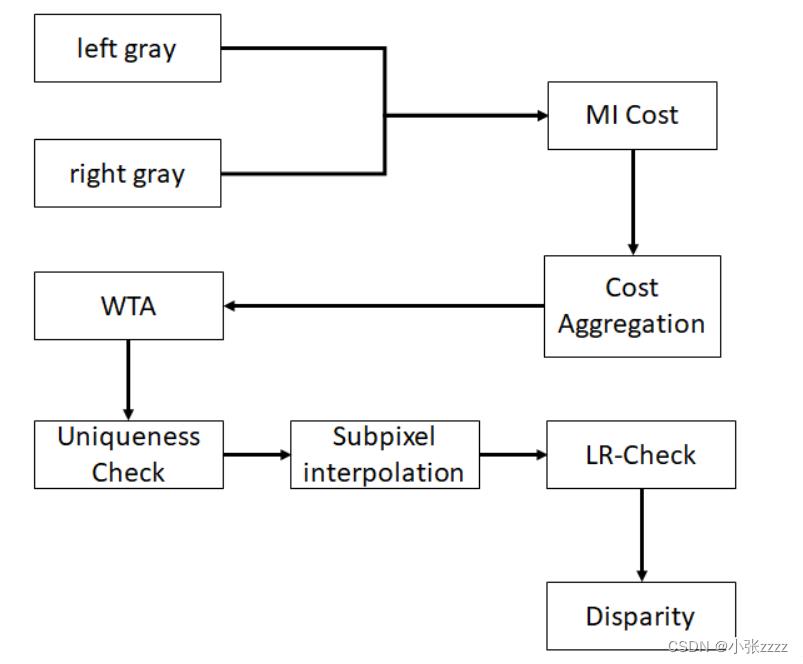
原始的SGM算法流程如下:
SGBM的算法流程如下:
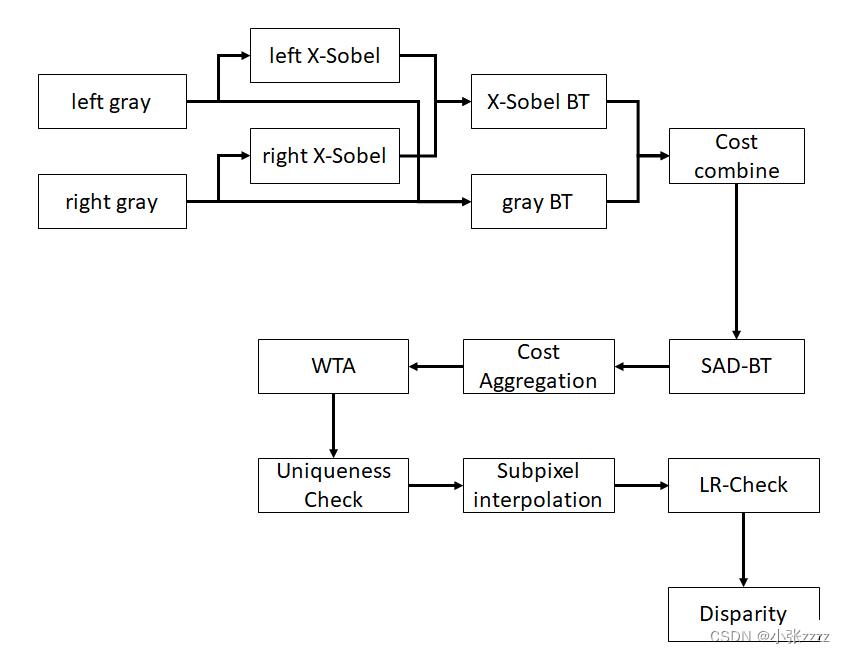
对比之后可以发现,SGBM和SGM区别的地方在于匹配代价的计算:SGBM采用的是SAD-BT,而SGM采用的是MI。
1.预处理
SGBM采用水平Sobel算子进行图像预处理,公式为

将x-sobel算子的结果做一个映射[0,preFilterCap*2],preFilterCap 为一个常数参数。

2.代价计算
代价有两部分组成:
1、经过预处理得到的图像的梯度信息
2、经过基于采样的方法得到的梯度代价。
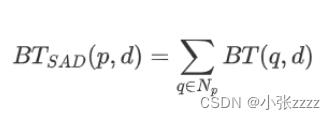
3、原图像经过基于采样的方法得到的SAD代价,因为BT代价是一维匹配,所以通常要结合SAD的思路,采用邻域求和的方法,计算SAD-BT,这样计算出来的代价就是局部块代价,每个像素点的匹配代价会包含周围局部区域的信息。

3.动态规划
动态规划算法本身存在拖尾效应,视差突变处易产生错误的匹配,利用态规划进行一维能量累积累,会将错误的视差信息传播给后面的路径上。半全局算法利用多个方向上的信息,试图消除错误信息的干扰,能明显减弱动态规划算法产生的拖尾效应。
半全局算法试图通过影像上多个方向上一维路径的约束,来建立一个全局的马尔科夫能量方程,每个像素最终的匹配代价是所有路径信息的叠加,每个像素的视差选择都只是简单通过 WTA(Winner Takes All)决定的。
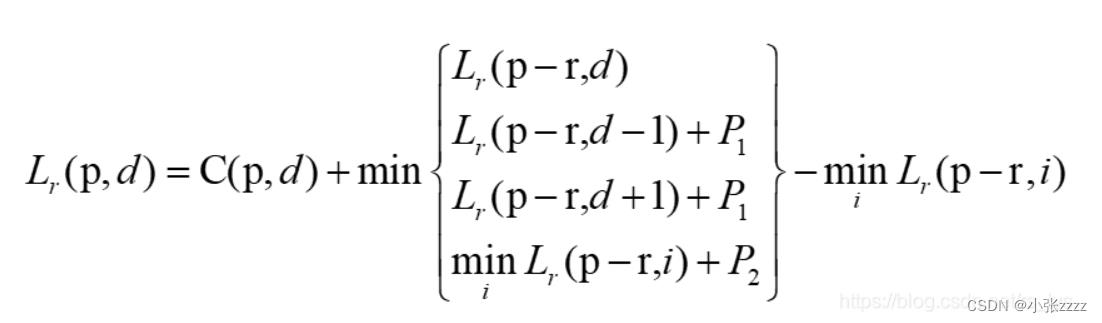
其中动态规划很重要两个参数P1,P2是这样设定的:
P1 =8cnsgbm.SADWindowSizesgbm.SADWindowSize;
P2 = 32cnsgbm.SADWindowSizesgbm.SADWindowSize;
cn是图像的通道数, SADWindowSize是SAD窗口大小,数值为奇数。
4.后处理
opencvSGBM的后处理包含以下几个步骤:
唯一性检测
亚像素插值
左右一致性检测
连通区域的检测
二、SGBM的python-opencv的实现
使用python-opencv的结果如下,已经写好,大家直接下载就好了。
基于python-opencv实现SGBM
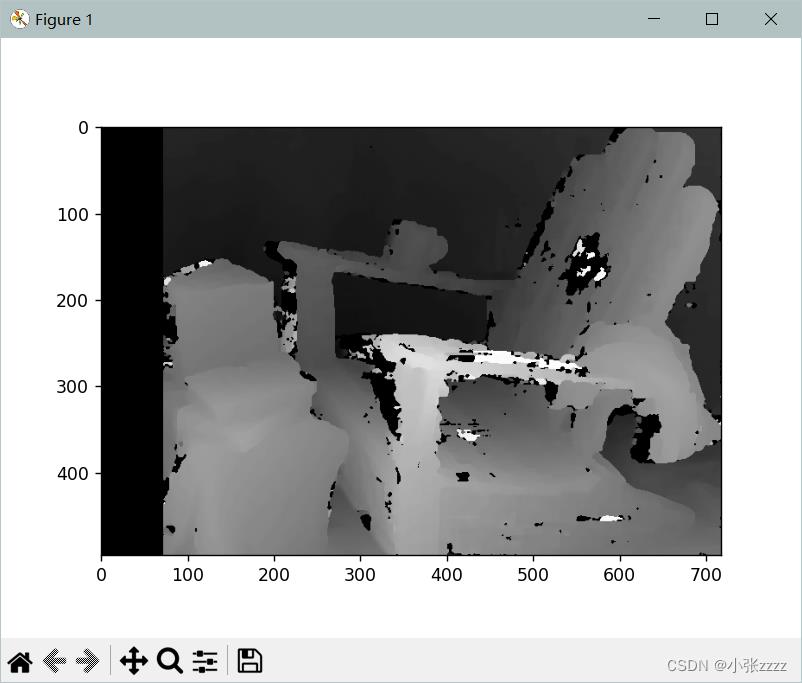
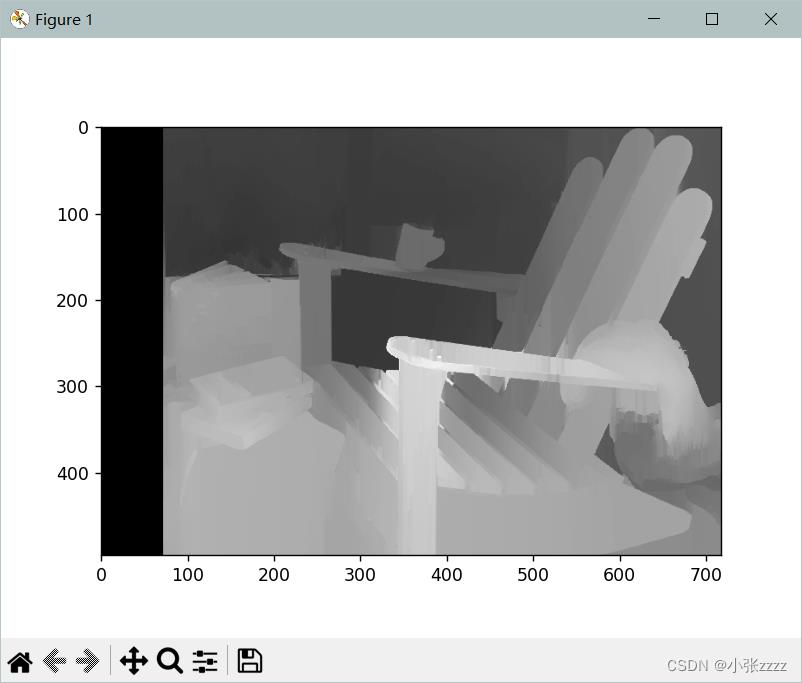
此外,还增加了wls滤波,增加图形连接效果。
直接修改图片位置即可运行,如下:

使用wls滤波:设置use_wls = True即可,
为了方便使用,增加了SGBM_slider.py,直接替换图片文件即可,方便大家观察参数效果,直接下载运行即可,运行结果如下:
基于python-opencv实现SGBM,带有滑动窗口
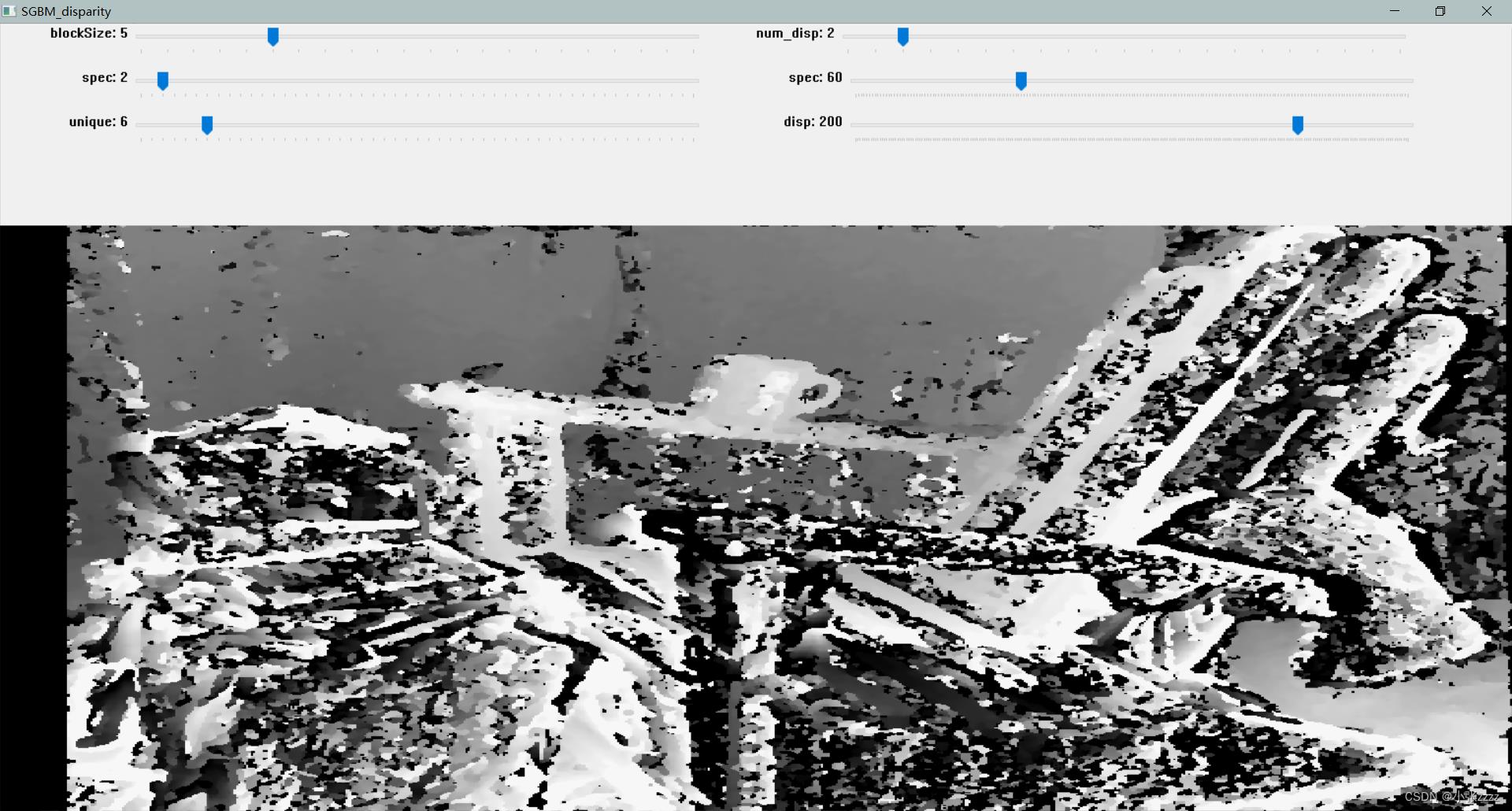
SGBM 参数选择

参考文章
参考几位大佬的文章,非常不错!
opencv中的SGBM原理+参数解释
【算法】OpenCV-SGBM算法及源码的简明分析
双目立体匹配算法SGBM
Python SGBM
基于Opencv的几种立体匹配算法+ELAS
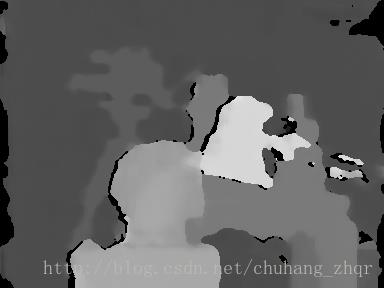
同http://blog.csdn.net/chuhang_zhqr/article/details/51179881类似,采用
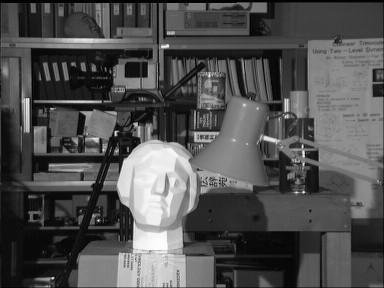
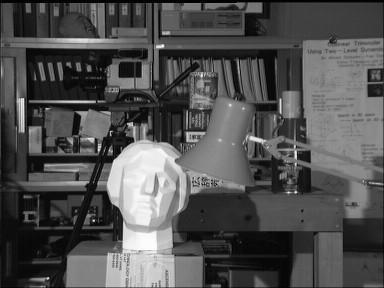
这两个经典的图片进行测试。
关于BM和SGBM以及VAR的参数设置请参考
晨宇思远
本文代码基于opencv2.4.9
本文源码地址在我的CSDN代码资源:
http://download.csdn.net/detail/chuhang_zhqr/9703763
0:ELAS
这里要去下载Elas的开源库函数。
int StereoMatch::ElasMatch()
{
cv::Mat disp_l,disp_r,disp8u_l,disp8u_r;
double minVal; double maxVal; //视差图的极值
cv::Mat leftImage = cv::imread("../test_images/leftr31.png",0);
cv::Mat rightImage = cv::imread("../test_images/rightr31.png",0);
// 计算视差
// generate disparity image using LIBELAS
int bd = 0;
const int32_t dims[3] = {leftImage.cols,leftImage.rows,leftImage.cols};
cv::Mat leftdpf = cv::Mat::zeros(cv::Size(leftImage.cols,leftImage.rows), CV_32F);
cv::Mat rightdpf = cv::Mat::zeros(cv::Size(leftImage.cols,leftImage.rows), CV_32F);
Elas::parameters param;
param.postprocess_only_left = false;
Elas elas(param);
elas.process(leftImage.data,rightImage.data,leftdpf.ptr<float>(0),rightdpf.ptr<float>(0),dims);
cv::Mat(leftdpf(cv::Rect(bd,0,leftImage.cols,leftImage.rows))).copyTo(disp_l);
cv::Mat(rightdpf(cv::Rect(bd,0,rightImage.cols,rightImage.rows))).copyTo(disp_r);
//-- Check its extreme values
cv::minMaxLoc( disp_l, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- Display it as a CV_8UC1 image
disp_l.convertTo(disp8u_l, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::minMaxLoc( disp_r, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- Display it as a CV_8UC1 image
disp_r.convertTo(disp8u_r, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::normalize(disp8u_l, disp8u_l, 0, 255, CV_MINMAX, CV_8UC1); // obtain normalized image
cv::normalize(disp8u_r, disp8u_r, 0, 255, CV_MINMAX, CV_8UC1); // obtain normalized image
cv::imshow("Left",leftImage);
cv::imshow("Right",rightImage);
cv::imshow("Elas_left",disp8u_l);
cv::imshow("Elas_right",disp8u_r);
cv::imwrite("Elas_left.png",disp8u_l);
cv::imwrite("Elas_right.png",disp8u_r);
cout<<endl<<"Over"<<endl;
cv::waitKey(0);
return 0;
}
1:BM算法
int StereoMatch::BMMatching()
{
cv::Mat disp,disp8u;
double minVal; double maxVal; //视差图的极值
cv::Mat leftImage = cv::imread("../test_images/leftr.png",0);
cv::Mat rightImage = cv::imread("../test_images/rightr.png",0);
int SADWindowSize = 19;
int numberOfDisparities =16*3; /**< Range of disparity */
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((leftImage.cols/8) + 15) & -16;
//bm.state->roi1 = remapMat.Calib_Roi_L;//左右视图的有效像素区域,一般由双目校正阶段的 cvStereoRectify 函数传递,也可以自行设定。
//bm.state->roi2 = remapMat.Calib_Roi_R;//一旦在状态参数中设定了 roi1 和 roi2,OpenCV 会通过cvGetValidDisparityROI 函数计算出视差图的有效区域,在有效区域外的视差值将被清零。
//bm.State->preFilterSize=41;//预处理滤波器窗口大小,5-21,odd
bm.state->preFilterCap = 31; //63,1-31//预处理滤波器的截断值,预处理的输出值仅保留[-preFilterCap, preFilterCap]范围内的值,
bm.state->SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 9; //SAD窗口大小5-21
bm.state->minDisparity = 0; //64 最小视差,默认值为 0
bm.state->numberOfDisparities = numberOfDisparities; //128视差窗口,即最大视差值与最小视差值之差, 窗口大小必须是 16 的整数倍
bm.state->textureThreshold = 10;//低纹理区域的判断阈值。如果当前SAD窗口内所有邻居像素点的x导数绝对值之和小于指定阈值,则该窗口对应的像素点的视差值为 0
bm.state->uniquenessRatio = 15;//5-15 视差唯一性百分比, 视差窗口范围内最低代价是次低代价的(1 + uniquenessRatio/100)倍时,最低代价对应的视差值才是该像素点的视差,否则该像素点的视差为 0
bm.state->speckleWindowSize = 100;//检查视差连通区域变化度的窗口大小, 值为 0 时取消 speckle 检查
bm.state->speckleRange = 32;//视差变化阈值,当窗口内视差变化大于阈值时,该窗口内的视差清零
bm.state->disp12MaxDiff = 1;//左视差图(直接计算得出)和右视差图(通过cvValidateDisparity计算得出)之间的最大容许差异。超过该阈值的视差值将被清零。该参数默认为 -1,即不执行左右视差检查。
//注意在程序调试阶段最好保持该值为 -1,以便查看不同视差窗口生成的视差效果。
// 计算视差
bm(leftImage, rightImage, disp);
//-- Check its extreme values
cv::minMaxLoc( disp, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- 4. Display it as a CV_8UC1 image
disp.convertTo(disp8u, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::normalize(disp8u, disp8u, 0, 255, CV_MINMAX, CV_8UC1); // obtain normalized image
cv::imshow("left",leftImage);
cv::imshow("right",leftImage);
cv::imshow("Disp",disp8u);
cv::imwrite("bm.png",disp8u);
cv::waitKey(0);
}

2:SGBM
int StereoMatch::SGBMMatching()
{
cv::Mat disp,disp8u;
double minVal; double maxVal; //视差图的极值
cv::Mat leftImage = cv::imread("../test_images/leftr.png",0);
cv::Mat rightImage = cv::imread("../test_images/rightr.png",0);
int numberOfDisparities =16*2; /**< Range of disparity */
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((leftImage.cols/8) + 15) & -16;
int SADWindowSize = 11;
sgbm.preFilterCap = 63;
sgbm.SADWindowSize = SADWindowSize > 0 ? SADWindowSize : 3; //3-11
int cn = leftImage.channels();
sgbm.P1 = 8*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;//P1、P2的值越大,视差越平滑。P2>P1,可取(50,800)或者(40,2500)
sgbm.P2 = 32*cn*sgbm.SADWindowSize*sgbm.SADWindowSize;
sgbm.minDisparity = 0;
sgbm.numberOfDisparities = numberOfDisparities; //128,256
sgbm.uniquenessRatio = 10; //10,0
sgbm.speckleWindowSize = 100; //200
sgbm.speckleRange = 32;
sgbm.disp12MaxDiff = 1;
sgbm.fullDP = 1;
// 计算视差
sgbm(leftImage, rightImage, disp);
//-- Check its extreme values
cv::minMaxLoc( disp, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- 4. Display it as a CV_8UC1 image
disp.convertTo(disp8u, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::normalize(disp8u, disp8u, 0, 255, CV_MINMAX, CV_8UC1); // obtain normalized image
cv::imshow("left",leftImage);
cv::imshow("right",leftImage);
cv::imshow("Disp",disp8u);
cv::imwrite("sgbm.png",disp8u);
cv::waitKey(0);
}
3:VAR
int StereoMatch::VARMatching()
{
cv::Mat disp,disp8u;
double minVal; double maxVal; //视差图的极值
cv::Mat leftImage = cv::imread("../test_images/leftr.png",0);
cv::Mat rightImage = cv::imread("../test_images/rightr.png",0);
int numberOfDisparities =16*2; /**< Range of disparity */
numberOfDisparities = numberOfDisparities > 0 ? numberOfDisparities : ((leftImage.cols/8) + 15) & -16;
var.levels = 3; // ignored with USE_AUTO_PARAMS
var.pyrScale = 0.5; // ignored with USE_AUTO_PARAMS
var.nIt = 25;
var.minDisp = -numberOfDisparities;
var.maxDisp = 0;
var.poly_n = 3;
var.poly_sigma = 0.0;
var.fi = 15.0f;
var.lambda = 0.03f;
var.penalization = var.PENALIZATION_TICHONOV; // ignored with USE_AUTO_PARAMS
var.cycle = var.CYCLE_V; // ignored with USE_AUTO_PARAMS
var.flags = var.USE_SMART_ID | var.USE_AUTO_PARAMS | var.USE_INITIAL_DISPARITY | var.USE_MEDIAN_FILTERING ;
// 计算视差
var(leftImage, rightImage, disp);
//-- Check its extreme values
cv::minMaxLoc( disp, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<endl<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- 4. Display it as a CV_8UC1 image
disp.convertTo(disp8u, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::normalize(disp8u, disp8u, 0, 255, CV_MINMAX, CV_8UC1); // obtain normalized image
cv::imshow("left",leftImage);
cv::imshow("right",leftImage);
cv::imshow("Disp",disp8u);
cv::imwrite("var.png",disp8u);
cv::waitKey(0);
}4:GC
GC好像只有在c版本的,我这里做了两个,一个是C的,一个是改了接口的C++版本的。
int StereoMatch::GCMatching()
{
IplImage * leftImage = cvLoadImage("../test_images/leftr31.png",0);
IplImage * rightImage = cvLoadImage("../test_images/rightr31.png",0);
CvStereoGCState* state = cvCreateStereoGCState( 16, 4 );
IplImage * left_disp_ =cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
IplImage * right_disp_ =cvCreateImage(cvGetSize(leftImage),leftImage->depth,1);
cvFindStereoCorrespondenceGC( leftImage, rightImage, left_disp_, right_disp_, state, 0 );
cvReleaseStereoGCState( &state );
cvNamedWindow("Left",1);
cvNamedWindow("Right",1);
cvNamedWindow("GC_left",1);
cvNamedWindow("GC_right",1);
cvShowImage("Left",leftImage);
cvShowImage("Right",rightImage);
cvNormalize(left_disp_,left_disp_,0,255,CV_MINMAX,CV_8UC1);
cvNormalize(right_disp_,right_disp_,0,255,CV_MINMAX,CV_8UC1);
cvShowImage("GC_left",left_disp_);
cvShowImage("GC_right",right_disp_);
cvSaveImage("GC_left.png",left_disp_);
cvSaveImage("GC_right.png",right_disp_);
cout<<endl<<"Over"<<endl;
cvWaitKey(0);
cvDestroyAllWindows();
cvReleaseImage(&leftImage);
cvReleaseImage(&rightImage);
return 0;
}int StereoMatch::GCMatching_Mat()
{
double minVal; double maxVal; //视差图的极值
cv::Mat disp8u_l,disp8u_r;
cv::Mat leftImage = cv::imread("../test_images/leftr31.png",0);
cv::Mat rightImage = cv::imread("../test_images/rightr31.png",0);
CvStereoGCState* state = cvCreateStereoGCState( 16, 5 );
cv::Mat left_disp_ =leftImage.clone();
cv::Mat right_disp_ =rightImage.clone();
IplImage temp = (IplImage)leftImage;
IplImage* leftimg = &temp;
IplImage temp1 = (IplImage)rightImage;
IplImage* rightimg = &temp1;
IplImage temp2 = (IplImage)left_disp_;
IplImage* leftdisp = &temp2;
IplImage temp3 = (IplImage)right_disp_;
IplImage* rightdisp = &temp3;
cvFindStereoCorrespondenceGC( leftimg, rightimg, leftdisp, rightdisp, state, 0 );
cvReleaseStereoGCState( &state );
cv::namedWindow("Left",1);
cv::namedWindow("Right",1);
cv::namedWindow("GC_left",1);
cv::namedWindow("GC_right",1);
cv::imshow("Left",leftImage);
cv::imshow("Right",rightImage);
/* //-- Check its extreme values
cv::minMaxLoc(right_disp_, &minVal, &maxVal );
cout<<"Min disp: Max value"<< minVal<<maxVal; //numberOfDisparities.= (maxVal - minVal)
//-- Display it as a CV_8UC1 image
right_disp_.convertTo(disp8u_r, CV_8U, 255/(maxVal - minVal));//(numberOfDisparities*16.)
cv::normalize(left_disp_,left_disp_,0,255,CV_MINMAX,CV_8UC1);
cv::normalize(disp8u_r,disp8u_r,0,255,CV_MINMAX,CV_8UC1);
*/
cv::normalize(left_disp_,left_disp_,0,255,CV_MINMAX,CV_8UC1);
cv::normalize(right_disp_,right_disp_,0,255,CV_MINMAX,CV_8UC1);
cv::imshow("GC_left",left_disp_);
cv::imshow("GC_right",right_disp_);
cv::imwrite("GC_left.png",left_disp_);
cv::imwrite("GC_right.png",right_disp_);
cout<<endl<<"Over"<<endl;
cv::waitKey(0);
return 0;
}

以上是关于基于python的opencv中SGBM立体匹配算法实现的主要内容,如果未能解决你的问题,请参考以下文章