四轴飞控DIY集成FPV功能
Posted lida2003
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了四轴飞控DIY集成FPV功能相关的知识,希望对你有一定的参考价值。
四轴飞控DIY集成FPV功能
四轴飞控DIY简明步骤介绍根据需求(能飞),只是安装了基本的四轴模型必须的组件。
- 飞控:Kakute F7 AIO V1.5
- 机架:F450
- 动力:翱云2212电机(正反一对)x 2 + ESC电调(20A) x 4
- 桨叶:正反自锁桨叶(一对) x 2
- 接收机:R9DS
- 电池:3S 2200mAh 25C
- 遥控:AT9S Pro
鉴于我们目前采用的是BetaFlight穿越机固件,那必不可少的是FPV飞行。因此,本章节准备集成FPV功能。
1. 功能需求
- 能够类似FPV FreeRider类似方式进行第一人称飞行
- 能够实时的保证传输(低延迟),便于响应控制
- 最大可能保证视角(期望看的宽来避免碰撞,避免安全问题)
- 系统角度视场能达到设备最优化
2. 概念介绍
2.1 制式
NTSC和PAL的区别有颜色编码、图像质量、帧数、分辨率线数。
- PAL标准:每秒25帧,扫描线为625线,奇场在前,偶场在后,标准数字化分辨率为720*576, 画面的宽高比为5:4
- NTSC标准:每秒30帧,电视扫描线为525线,偶场在前,奇场在后,标准数字化分辨率为720*486, 画面的宽高比为4:3
优劣对比
- PAL自带颜色管理,NTSC则需要手动校准;
- 图像质量方面PAL的画质要好于NTSC;
- 帧数上NTSC为29/97帧,PAL则只有25帧;
- 分辨率上,NTSC的DVD分辨率为720x480,PAL则为720x576;
2.2 显示分辨率
- 480p,720x480
- 720p, 1280x960
- 1080p, 1920×1080
2.3 摄像头线数
线数和分辨率的关系:线数x宽高比=高, 分辨率[线数, 高]
TVL(TVLine)实际上主要用于模拟摄像机,而通常情况下模拟600~700TVL就非常不错了。而随着FPV的需要,实际上很多高线数的摄像头不能采用这种常规的计算方法,因此如果一定要考虑分辨率建议700TVL以下的可以采用上述计算公式。高于这个的更多还是看实际情况和厂家提供的分辨率参数。
高于700线
- 1200线是130万像素左右,分辨率:1280*960=1228800
- 1000线是100万像素左右,分辨率:1280*720=921600
低于700线
- 700线
- 7004/3=933,实际分辨率是700933
- 70016/9=1244,实际分辨率是7001244
- 600线,
- 6004/3=560,实际分辨率是600800
- 60016/9=746,实际分辨率是6001066
- 540线,
- 5404/3=560,实际分辨率是540720
- 54016/9=746,实际分辨率是540960
- 480线,
- 4804/3=560,实际分辨率是480640
- 48016/9=746,实际分辨率是480853
- 420线
- 4204/3=560,实际分辨率是420560
- 42016/9=746,实际分辨率是420746
3. 需求分析
- 第一人称角度的需求,目前看来只有在四轴上放摄像头;
- 户外飞行的角度,手机、平板、眼镜都可以作为显示装置;
- 手机:通过上次碰到公园小伙伴的情况,手机看存在几个问题:a)有点反光;b)高亮背景,对比度不够;c)一般遥控器上要配特殊支架
- 平板:和手机情况类似,关于支架的问题解决就更加困难;如果分开放置,容易受到周边干扰
- 眼镜:【最优解】无需多说
- 大多数穿越机都是模拟,因为延迟短。数字存在编码,解码过程。(实际模拟器上略有顿挫感的画面是飞不好的原因之一,当然一开始自己的技术本来就比较菜)
- 视角的问题,通过查阅资料,考虑摄像头的FOV(Field of View)参数,尽量选择大的。
- 第二点基本上决定了肥鲨眼镜(目前HDO2 显示分辨率是1280 x 960, 4:3),所以摄像头也选这个比率,就能发挥两者的最大性能。
- 还要考虑安装孔位的问题,尽量与Kakute F7 AIO 30.5 x 30.5 mm统一尺寸的,方便塔式安装;也要考虑塔式安装是否能够满足F450机架空间要求。
注:视角FOV是指镜头所能覆盖的范围,(物体超过这个角就不会被收在镜头里),一个摄像机镜头能涵盖多大范围的景物,通常以角度来表示,这个角度就叫镜头的视角FOV。
4. 组件选择
根据上面的的分析以及某宝的各种搜索,最终决定采购如下:
- 摄像头:Caddx Ant 1200TVL 4:3
- 图传:PandaRC VT5804M L1 (Buzzer/Mic/IRC Protocol) 5.8G
- 接收机:FOXEER WILDFIRE 5.8G (Long antenna without Panel Antenna)
- 眼镜:Fatshark HDO2
5. 接线组装
没有和笔者一致配套的接线图,不过“皇天不负有心人”,找了一个相对接近的图,用这张Holybro Kakute F7的做解释(也很漂亮!!!)。
上面采购的组件,飞控端需要是以下几个组件:
- 摄像头:采集视频信息
- 图传:传输视频信号
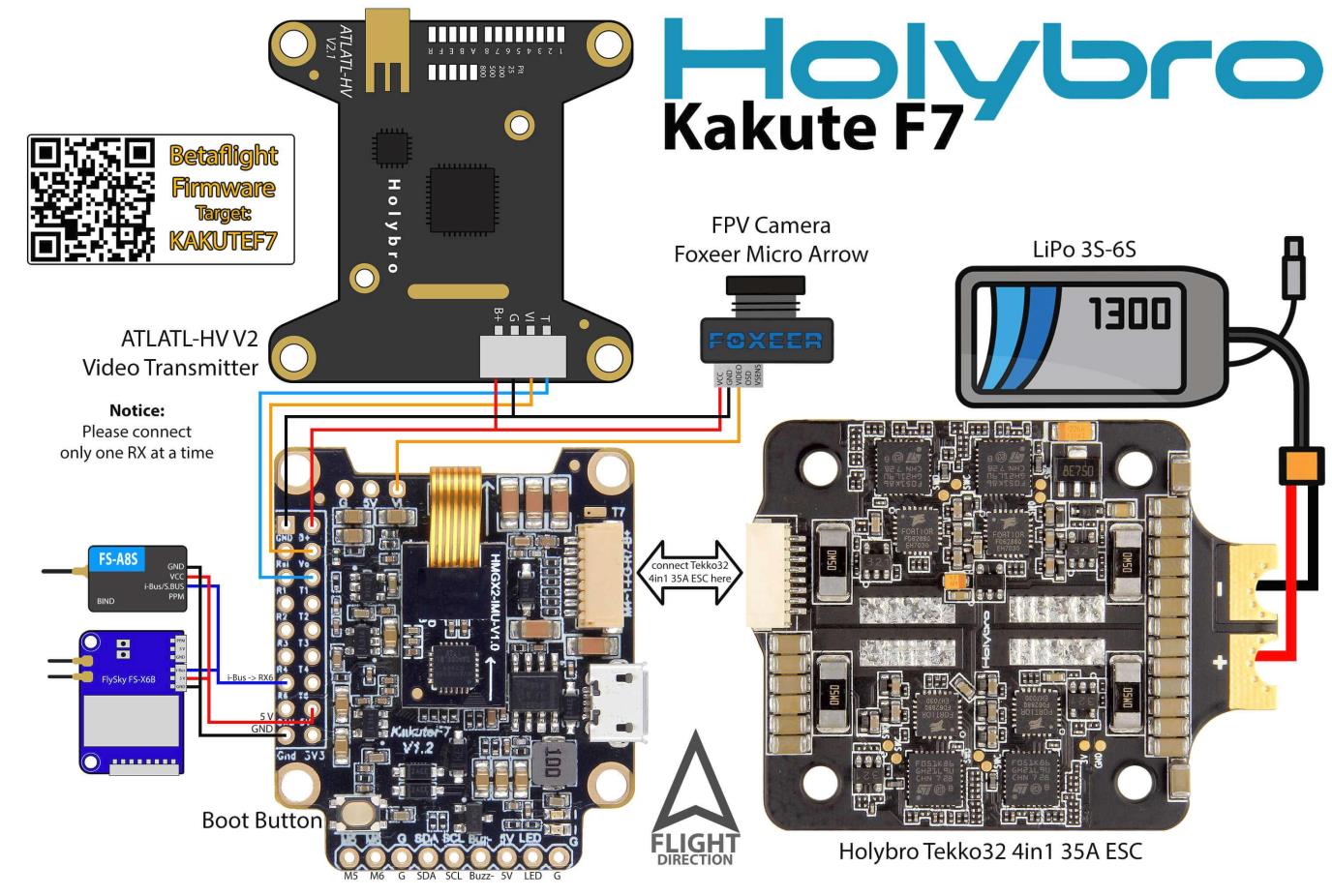
5.1 摄像头接线
摄像头(Caddx Ant)出了两路线:
- 第一路(VI & GND & VCC)视频信号及供电线 ==》接飞控Kakute F7 AIO视频专用输入口
- 第二路(OSD & GND)5按键板连接线 ==》接飞控Kakute F7 AIO串口(可配置)
第二路线主要用于配置摄像头,有一块模拟按键板可以操作配置,也可以接到FC上用遥控器模拟按键板。不过为了简化,且配置好通常不太调整,这里就没有连接飞控。BetaFlight是支持这个OSD按键模拟的,详见BetaFlight模块设计之十九:摄像头按键控制模拟任务分析。
5.2 图传接线
图传(PandaRC VT5804M L1)是一个四合一的集成板子,内部Buzzer/Mic,这个也是个人比较需要的,因为KakuteF7 AIO没有喇叭(有些报警音听不到)和麦克风(想听听上天后飞机的声音-)。
注:除了这个其他还有4个LED灯条可以控制,主要通过图传板上的按键调整,感觉用途不大,这里也不介绍了。
图传出的排线可以分为三路:
- 第一路(VO & GND & RX)==》接飞控Kakute F7 AIO专用视频输出和串口(可配置)
- 第二路(Buzzer) ==》接飞控Kakute F7 AIO喇叭Buzz-
- 第三路(VCC & GND) ==》接飞控Kakute F7 AIO分电输出(任何一路均可)
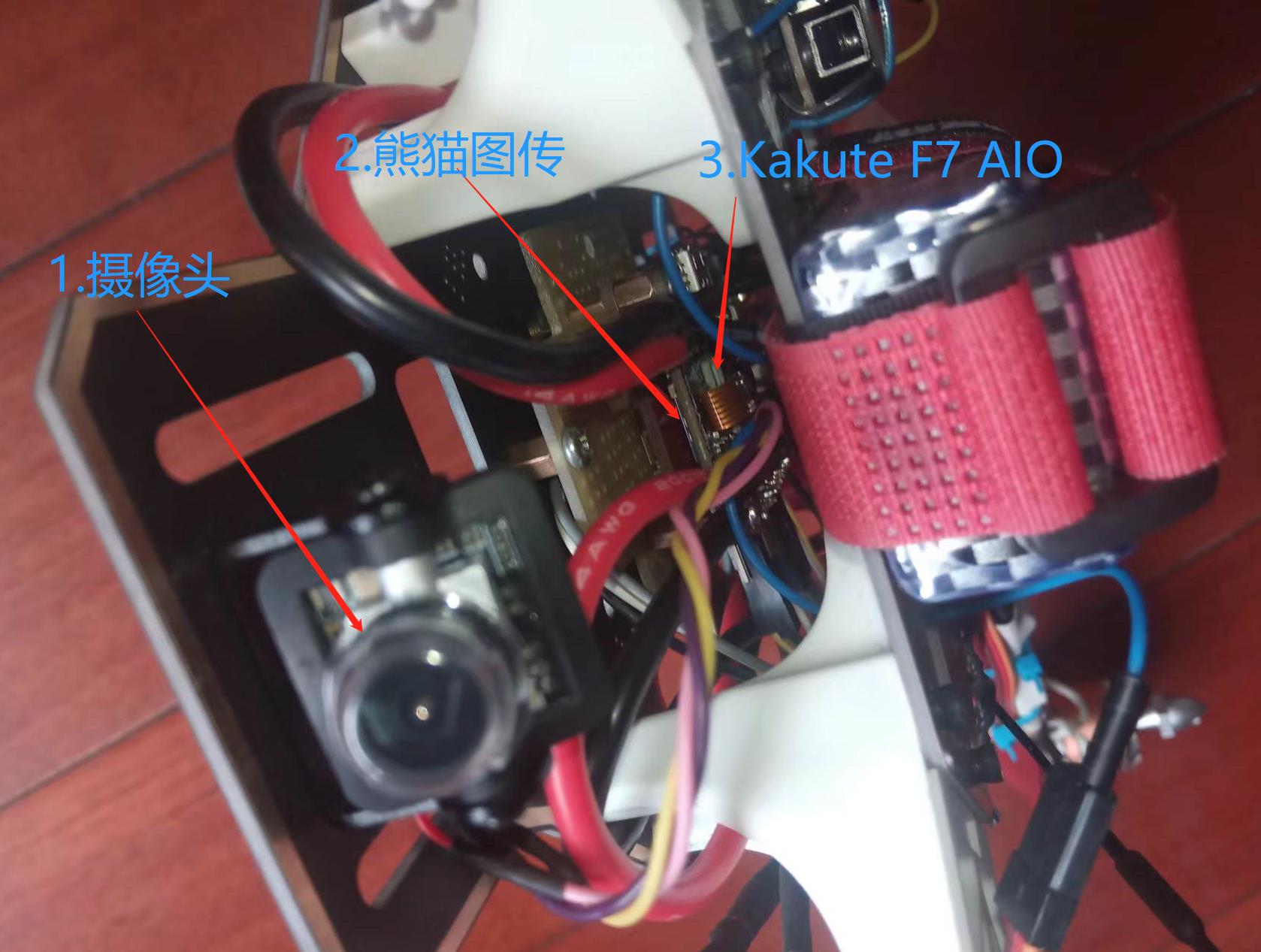
6. 组装位置
在测试组装发现了散热问题,之前没有考虑到。相对来说图传比飞控更烫。
- 图传模块超级热(模组油票孔贴片发烫)
- KakuteF7 AIO(STM32F7主芯片发烫)
实际装好后,感觉还可以吧(先看看再说)
- 图传和飞控发热的位置分别安排在不同层,没有堆叠到一起。
- 塔式两层之间距离大概是5mm。
- 飞的时候,桨叶已经周边的风会比较大,容易散热。
- 且该位置不再长时间爆嗮位置。
另外,400mW图传配置下,实测对整体功耗影响不大(没有显著的分钟级电池耗电减少)。
7. FPV功能调试
笔者是在组装之前进行的调试,毕竟装好了如果有问题受到很多限制。比如:
- 空间受限
- 无法看到LED指示灯(机架或者控制板视线遮挡)
- 按键触摸不便(机架或者走线遮挡)
- 接线不便
- 插拔线受空间限制,重新更换端口很麻烦
- 有些接线是焊接的,如果重新焊接那就是大工程了
- 调试不变(组装好之前,有些部件可以分开上电,测试效果)
这里整理了下调试的主要内容:
- 摄像头+图传频点(频段+通道)与接收机的通信调试;
- 摄像头参数调试(通过按键板);
- 图传IRC通道协议调试;
7.1 摄像头+图传+接收机的通信调试
注:图传和接收机的物理按键配置具体操作这里就不重复描述,直接看官网就好。
7.1.1 频点调试(频段+通道)
这里发现熊猫图传在频点(频段+通道)上的几个问题:
- 似乎并非表中所有频点都能用(频点表白色部分)
- 其中部分频点还会有重复,比如:E-CH3和E-CH4都是5665;E-CH6、E-CH7、E-CH8都是5905
总的来说,这个表格真的很奇怪。反正来自官网,也无法解释详细原因,用的时候注意用能用的,且比较正常的频点(频段+通道)就好。
*
注:通过某宝客服反馈厂家了解两个问题:
1)是否有熊猫图传导入频率,功率的配置文件?厂家反馈:无配置文件
2)红色框框内熊猫图传为什么不同通道(在同一个频段),频率是一样的?厂家反馈:无反馈(大约1个礼拜了吧,放弃沟通!!!)
大家仔细看下去,关于VTX配置文件以及F450+KakuteF7的BetaFlight配置我都会给出。
*
 相比而言,野火接收机的频点(频段+通道)就比较正规,不重复。
相比而言,野火接收机的频点(频段+通道)就比较正规,不重复。
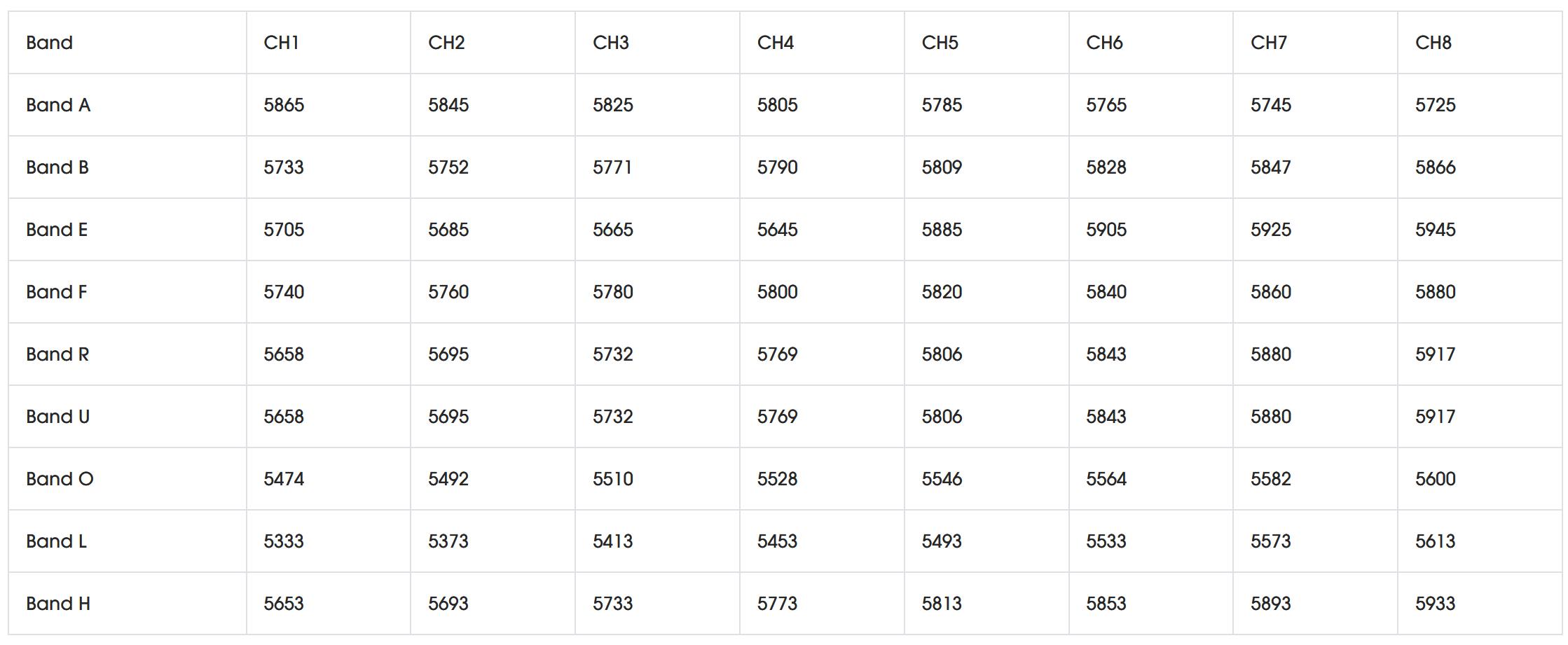 笔者在实际使用的时候,配置在E-CH1,E-CH2,E-CH3,默认采用E-CH1。
笔者在实际使用的时候,配置在E-CH1,E-CH2,E-CH3,默认采用E-CH1。
7.1.2 功率调试
测试调试过程先随便配置一个功率(比如:通过按键操作,从LED装态灯确认配置25mW,发热低),确保能通信,也不容易烫手。
注1:详细的可以通过后续BetaFlight IRC协议进行配置。
注2:这里遇到一个小问题,非常烦人!!!因为当IRC接着飞控的时候,图传模块配置功率,频段,通道始终不能成功。后来将图传上的Rx与飞控断开,才配置成功的。


7.2 摄像头参数调试
通常情况下,摄像头正确接线,图像肯定有的。
如果真的遇到图线没有,请检查以下几点:
- 摄像头是否正确接线 GND & VCC & VI ==》 接飞控Kakute F7 AIO专门用于图线接入的GND & VCC & VI
- 图传是否正确接线 GND & VI ==》接飞控Kakute F7 AIO的VO以及临近的GND
- 摄像头GND VCC电压范围和驱动功率是否满足摄像头规格要求
- BetaFlight飞控OSD配置页面有个视频格式,是否Auto(反正不确定就尽量Auto)
注:也许眼镜里面也有图像格式的配置,我没有看到,不过如果可以也配成Auto吧。
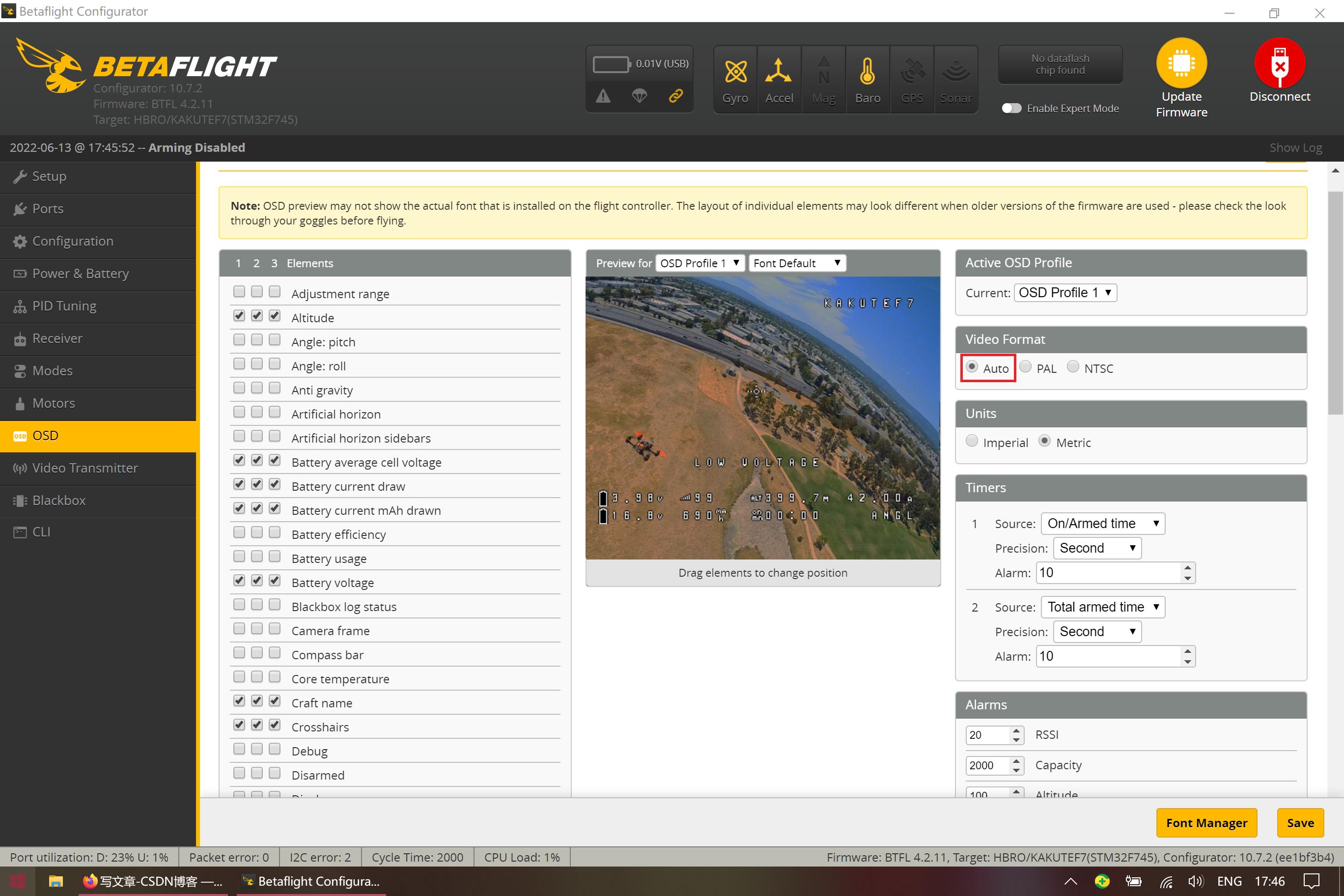
言归正传,关于摄像头的配置取决于场景问题,这个摄像头4:3是固定的,而某宝技术支持反馈NTSC和PAL对于摄像头性能以及分辨率没有影响,国内推荐使用PAL。
注:对于这个某宝的技术支持反馈的这个说法,我不太认同,但是也说不出个专业道道来。目前,我是按照PAL配的(其他参数默认),后续实际长时候再向大家汇报吧。
7.3 图传IRC通道协议调试
7.3.1 OSD菜单操作方法
BetaFlight模块设计之二十:CMS菜单模块分析从代码角度给出CMS菜单操作方法:
- 打开/ 进入菜单:IS_MID(THROTTLE) && IS_LO(YAW) && IS_HI(PITCH)
- 向上翻页: IS_HI(PITCH)
- 向下翻页:IS_LO(PITCH)
- 向左翻页:IS_LO(ROLL)
- 向右翻页:IS_HI(ROLL)
- 退出选项:IS_LO(YAW)
- 保存菜单:IS_HI(YAW)
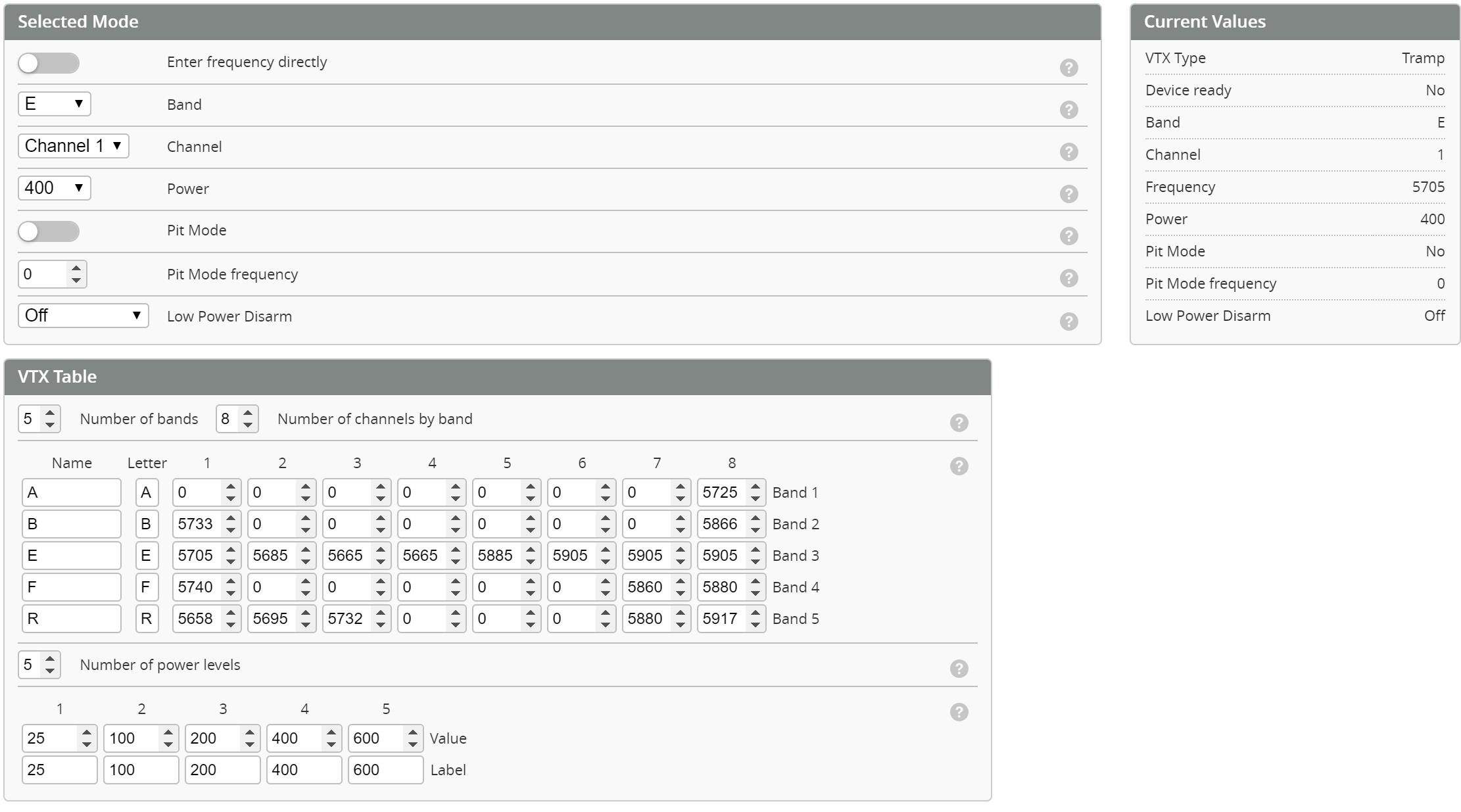
7.3.2 图传VTX表格配置
由于OSD菜单选择的是图传的功率,频段,通道,从而向图传模块发送配置命令。而每个图传模块的VTX表格并不严格一致,因此需要我们先配置VTX表格。
关于VTX表格有两种配置方法:
- 直接从配置文件导入;
- 手工输入;
注:笔者根据官网提供的规格参数制作了一份VTX配置文件,如有需要可以下载BTFL_vtxtable_PandaRC_VT5804ML1。
无论哪种方法,以下是配置好的VTX表格(0表示不支持的频点):
7.4 RSSI信号叠加
为了在OSD上显示RSSI信号强度,根据radiolink给出了官方的指南进行了相应的配置。
7.4.1 实测第一次
实测情况:
1)人站在中间A位置(飞机也在中间位置地面近距离62左右,空中大概40);
2)RSSI大概到C位置,降为25左右;
3)RSSI大概到B位置,降为35左右;
4)B到C位置总长120米左右;
5)飞行高度在5~10米;
目前怀疑问题:(排除遥控接收机天线折断或者有折痕等情况)
1)接收机天线放置不合理,建议垂直朝下或者45度摆放,匹配天线苹果图效果;
2)接收机内部RF放大电路损坏(不过这个买来也没有多少次,怎么会坏????)
注:据反馈应该在目视距离450米的样子,而实际目前使用100米都够呛。至于官方提供的4000米,貌似没有这么理想。

7.4.2 官方推荐测试方法
根据官方测试方法:如何检测AT9S Pro/AT9S/AT9的信号强度(如何检测AT9S Pro/AT9S/AT9的RSSI值)

实际测试结果:-10dB,满足0到-18dB要求。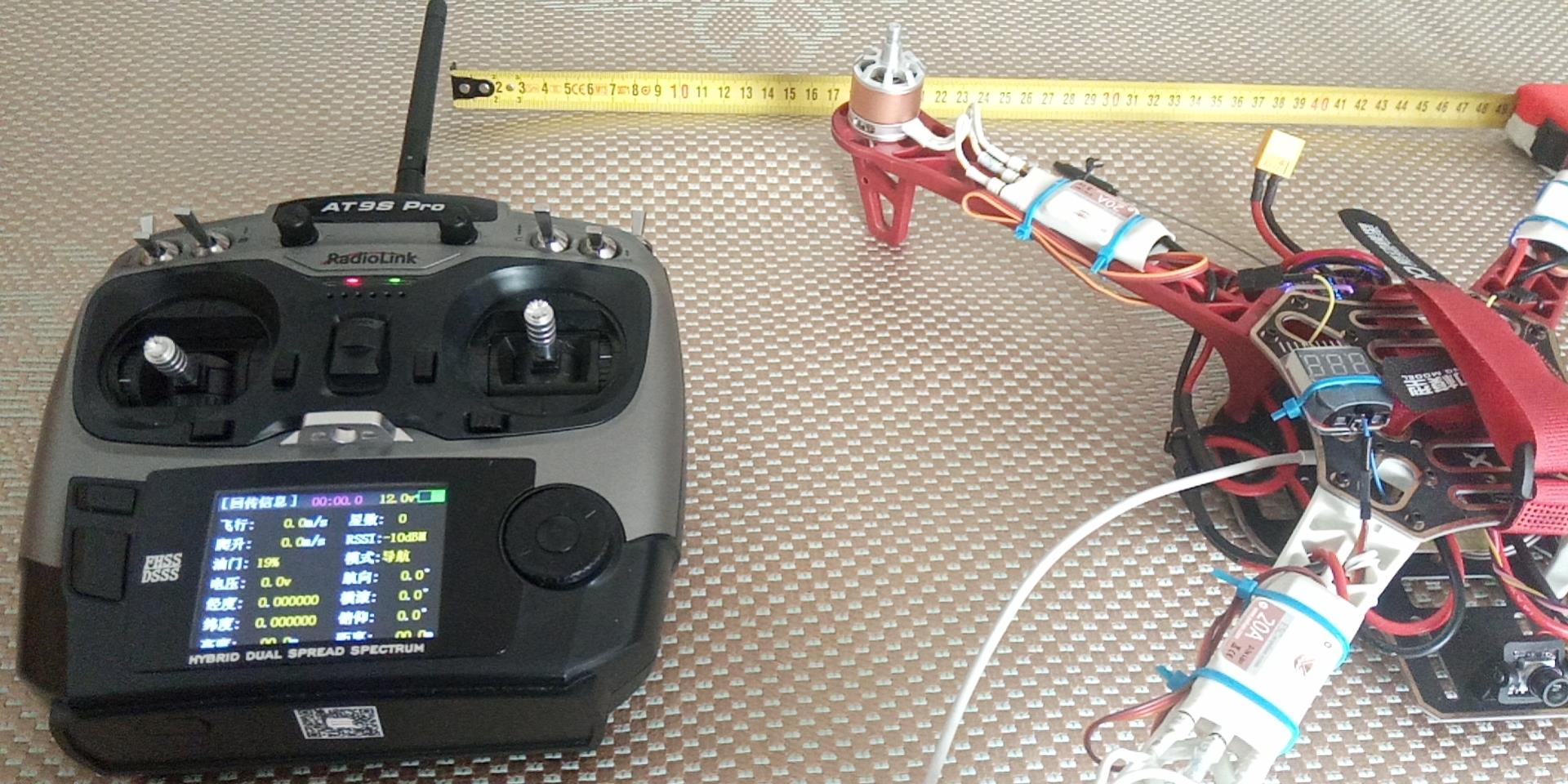
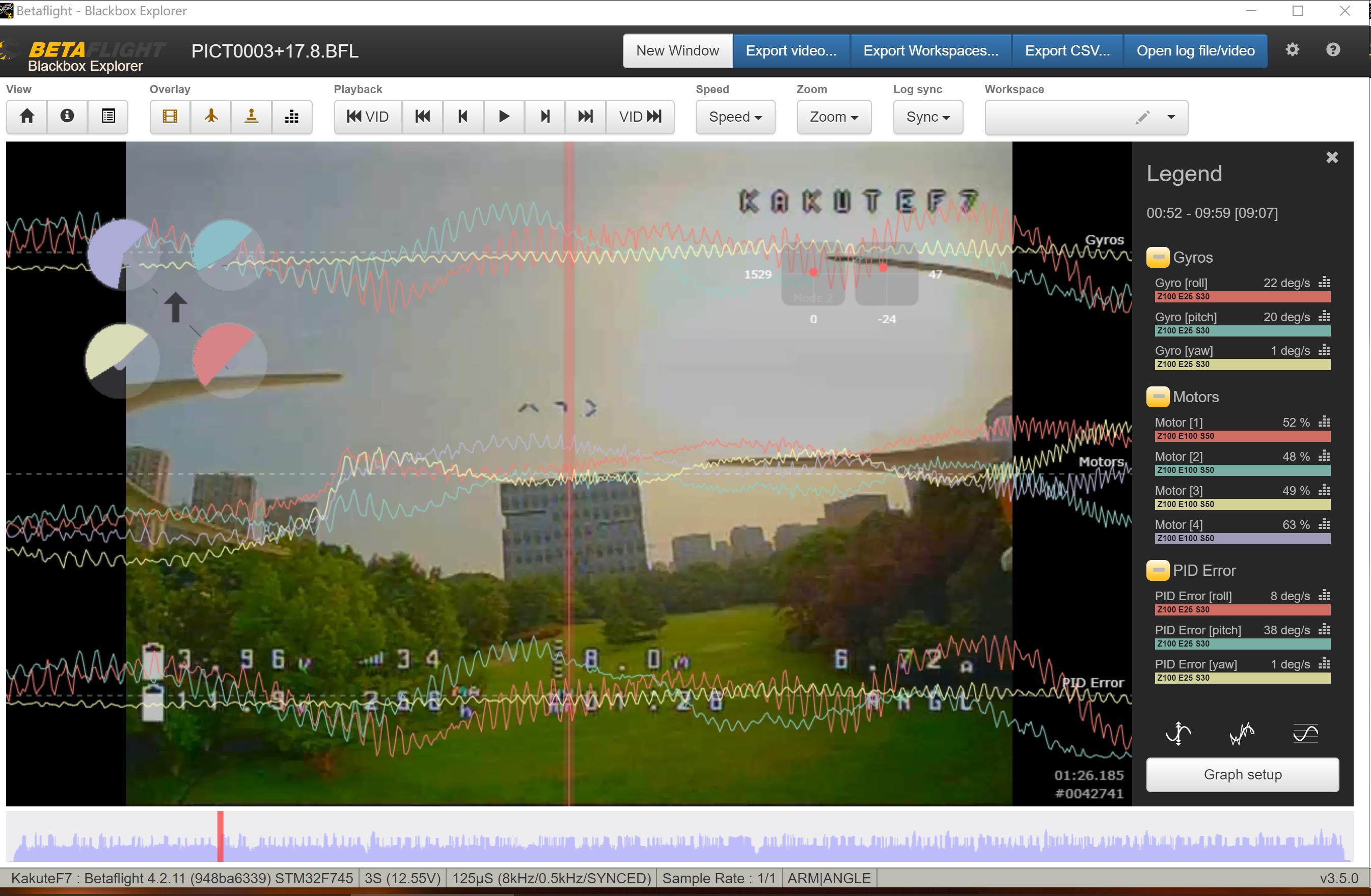
8. 整体FPV效果
- F450_BTFL_KakuteF7_20220612配置文件
- BTFL_vtxtable_PandaRC_VT5804ML1 VTX配置文件
 目前,这个ESC(Electronic Speed Control)没有开源BLHeliSuite支持,因此与电机相关的振动都无法很好的做过滤,整体上感觉不是很好。
目前,这个ESC(Electronic Speed Control)没有开源BLHeliSuite支持,因此与电机相关的振动都无法很好的做过滤,整体上感觉不是很好。
 下面给个干净点的照片,这个是经常试飞的公园_
下面给个干净点的照片,这个是经常试飞的公园_

补充1:血的教训
这里补充一个血的教训,也是一个插曲,导致整个FPV功能集成出了一个大的波折。
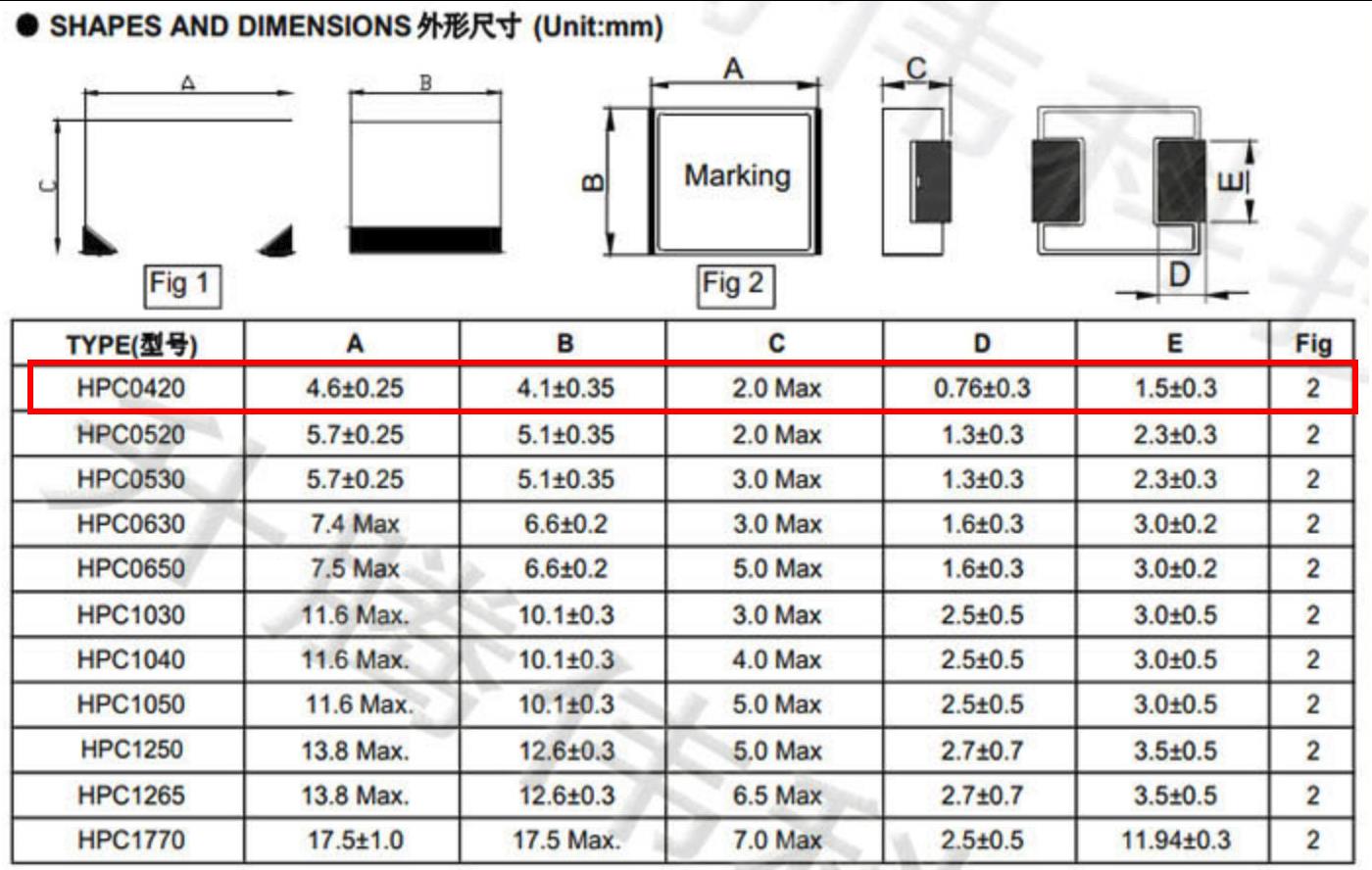
SBUS误插到PWM3个地的位置,导致5V对GND短路,飞控的贴片一体成型0402封装大电流电感(18uh)直接烧掉(徐徐青烟!!!徐徐青烟!!!徐徐青烟!!!),重要的事情说三遍。
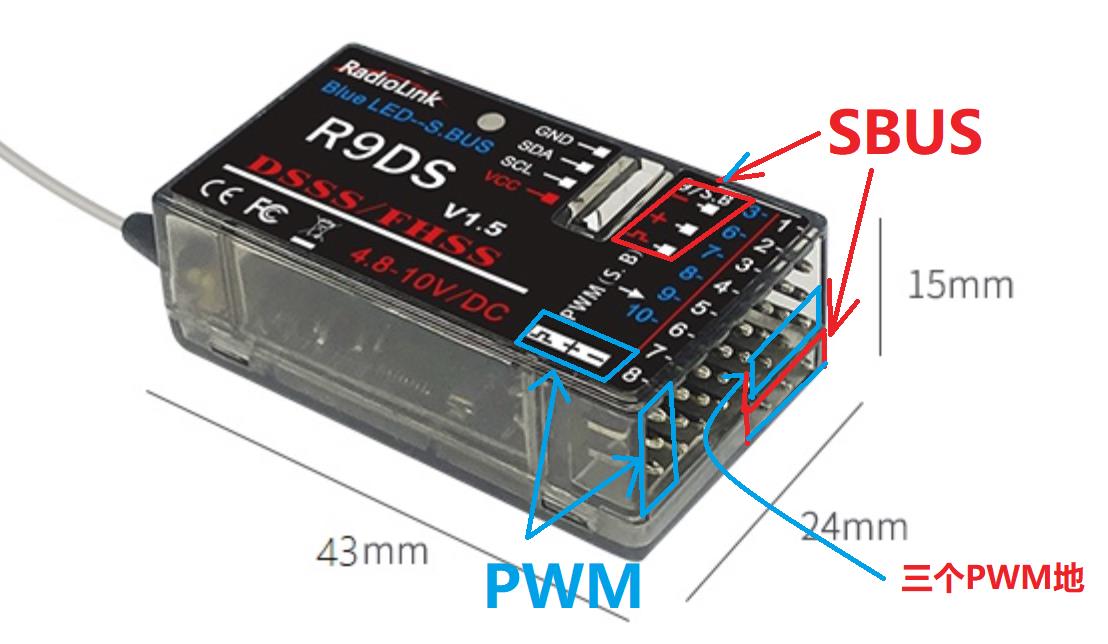
为了修复这个电感花了大力气,因为左右都是贴片电阻。除此之外,这个规格180(18uh)的电感,没有对应的规格,0402通常最大只有100(10uh),最后和商家对接了,才搞了一个220(22uh)的【本着选大不选小的原则】。2天的路程+1天的焊接修复,心疼啊!!!
 这个小插曲也请大家注意接线,一定要仔细检查。
这个小插曲也请大家注意接线,一定要仔细检查。
刚开始有问题的时候其实我是笔记本电脑usb供电,飞控不亮灯,笔记本提示usb功耗过大(因为短路了)。没有引起我的重视,直接上了电池,结果把降压DC2DC的电感给当保险丝烧断了,好大的一阵青烟(smoke!!!smoke!!!smoke!!!)
当时如果在笔记提示usb功耗过大,飞控灯不亮的时候,引起重视,着重检查那就不会出现这个问题了。
所以,一定要仔细,仔细仔细再仔细!!!
补充2:试飞小插曲
试飞没注意,结果不小心飞到树上去了,啃爹啊!还好这种云杉树分支很多而且均匀,可以当梯子,自己没费太多力,总算是爬上去,把四轴给拿了下来_。
 树上挂住以后就是这个场景,貌似还很安逸的位置啊。
树上挂住以后就是这个场景,貌似还很安逸的位置啊。

以上是关于四轴飞控DIY集成FPV功能的主要内容,如果未能解决你的问题,请参考以下文章
TX12 + ExpressLRS 915MHz RC控制链路配置及问题汇总
四轴飞控DIY Mark4 - RTH/GPS Rescure