四轴飞控DIY Mark4 - 减震
Posted lida2003
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了四轴飞控DIY Mark4 - 减震相关的知识,希望对你有一定的参考价值。
四轴飞控DIY Mark4 - 减震
前一段时间,我们DIY了一台F450(10年前)的RC四轴模型,总体上也接触了四轴飞行器的一些基本知识,对航拍、穿越等做了一些初步的了解。
- 经过试飞,总体满意感还是不错的,积累了一些经验:
- 如何操控四轴飞行, 以及上机之前的一些准备工作==》四轴FPV无人机手动操作简明介绍
- 什么方式才能远航以及精准操控四轴==》四轴飞控DIY集成FPV功能
- 为什么穿越机FPV会出现果冻?==》关于穿越机FPV视频果冻效应的讨论
- 遥控器,发射机,接收器都是带MCU的小型设备,含嵌入式固件,不仅仅是飞控/ESC==》TX12 + ExpressLRS 915MHz RC控制链路配置及问题汇总
- 后续主要考虑RC体验的一些方向:
- 解决果冻效应
- 增加图传距离
- 增加遥测距离
- 增加航拍设备
- 本章节主要是为了解决果冻效应:上次的经验总结
- 【更换】更硬材质的机架(小机架5寸,炭纤维材质;非廉价机架F450 10寸 尼龙塑料材质)
- 【更换】大KV值电机(高频小幅度振动,容易被减震部件吸收)
- 【采用】电机与机架的TPU防震(之前是自己做的1mm橡胶垫圈,可能没有TPU打印专用的好)
- 【采用】飞控防震垫圈(陀螺仪虽然有泡沫吸收振动,但是从滤波前后看,吸收的还是不够)
- 【采用】多叶桨(三叶桨),低螺距(低端扭矩小),小翼尖(减少阻力),期望控制粒度细腻/性能稳定,且大众桨叶(比如:51466)
1. DIY Mark4
本次DIY的主要目的:为了验证和解决F450上,由于振动带来FPV摄像头视频的果冻效应。
DIY可以参考:
【1】四轴飞控DIY简明步骤介绍
【2】BetaFlight & BeeRotorF3 四轴飞行器配置F450
视频回路设备不做变更,适配Mark4机架,必要组件如下:
- 电机(Motor)+ 电调(ESC,Electronic Speed Control)
- 飞控(FC,Flight Control):集成导航模块(IMU,Inertial Measurement Unit)陀螺仪+加速度
- 动力源:可以采用可充电电池
- 遥控器+遥控接收机
- 【不变更,沿用F450设备】FPV摄像头
- 【不变更,沿用F450设备】图传
- 【不变更,沿用F450设备】眼镜 + 图传接收机
2. 改进事项
2.1 Mark4 5 inches机架
改进内容:【更换】更硬材质的机架(小机架5寸,炭纤维材质;非廉价机架F450 10寸 尼龙塑料材质)
期望目标:整体机架更加硬质==》消除导致果冻的低频大幅震动
改进点:
- 机架变小: 10 inches ==》 5 inches
- 材料更换: 尼龙塑料 ==》 炭纤维材质

2.2 2205 2450KV 无刷电机
改进内容:【更换】大KV值电机(高频小幅度振动,容易被减震部件吸收)
期望目标:降低低频振动以及振动幅度
改进点:
- KV值提高: 910KV ==》2450KV

2.3 电机与机架的TPU防震
改进内容:【采用】电机与机架的TPU防震(之前是自己做的1mm橡胶垫圈,可能没有TPU打印专用的好)
期望目标:通过TPU防震件吸收部分电机和桨叶带来的振动能量,降低振幅
- TPU打印件: 自制橡胶垫(1mm) ==》 TPU打印件(2mm)

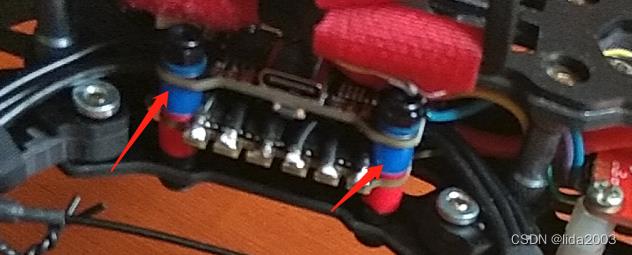
2.4 飞控防震垫圈
改进内容:采用吸收振动较好的橡胶减震柱(将控制板套在减震柱上避震)
期望目标:降低机架传递过来的干扰振动影响到陀螺仪原始采集数据(硬件方式做无效数据清洗)
改进点:
- 使用橡胶减震柱
2.5 三叶平衡桨
改进内容:【采用】多叶桨(三叶桨),低螺距(低端扭矩小),小翼尖(减少阻力),期望控制粒度细腻/性能稳定,且大众桨叶(比如:51466)
期望目标: 通过桨叶数量提高,增加稳定性
改进点:
- DALPROP T5046C
- 乾丰GEMFAN 51466
3. 试飞效果
对比之前F450试飞视频,振动导致的果冻效应明显消除(基本不存在果冻效应)。
3.1 视频资料
- F450视频
【1】BetaFlight Kakute F7 AIO F450 +ELRS(915Mhz)+500mW 红色桨叶,全新
【2】BetaFlight Kakute F7 AIO F450 + TX12 + ELRS(915Mhz) 红色桨叶,全新
【3】BetaFlight Kakute F7 AIO F450试飞 白色桨叶,不全新
【4】BetaFlight Kakute F7 AIO F450 + Meilin South Road, 前面白色桨叶,后面红色桨叶,都不全新
- Mark4视频
【1】背光补偿(自动)+猪尾巴天线(放置915天线,平行绑扎) + 清晨(有点雾霾)
==》 BetaFlight Mark4 + NorthCityPark, DALPROP T5046C
【2】全局曝光+猪尾巴天线(放置机肚子位置,靠左前臂) + 晴朗早晨
==》 BetaFlight Mark4 + NorthCityPark (Second), DALPROP T5046C
【3】背光补偿(自动) + 棒子天线(斜45度) + 晴朗早晨
==》待测试,后续提供视频
3.2 对比分析
- arm之后,起飞之前
- F450视频: 明显看到地面振动,形成抖动的果冻效应。
- Mark4视频: 地面无明显抖动,甚至感觉不到振动。
- 起飞之后
- F450视频: 果冻效应明显
- Mark4视频: 无果冻现象
- 续航能力
- F450续航时间: 10分钟
- Mark4续航时间: 16分钟
整体感觉: 1) 无导致果冻效应的低频振动; 2) Mark4控制更加丝滑; 3) 续航能力更强了。
4. 问题汇总
当然,尚存在一些问题,可能会影响RC体验。我们分两个部分来逐步完善:
- 改善以后试飞
- 后续改进计划
4.1 改善以后试飞
- 图传信号质量不好(以后可能还需要考虑增加距离)
当前图传使用的是猪尾巴天线,且放置与飞机尾部,与915MHz接收机天线平行,
可能当飞机飞回来的时候,5.8G图传信号被飞机与电池遮挡,导致信号质量变差的问题。
- 解决方法一:将图传天线绑到机臂上,并且从飞机下方走天线
- 解决方法二:使用棒棒糖天线,通过MMCX转SMA的方法,用后面的图传天线支架,将天线切斜45度
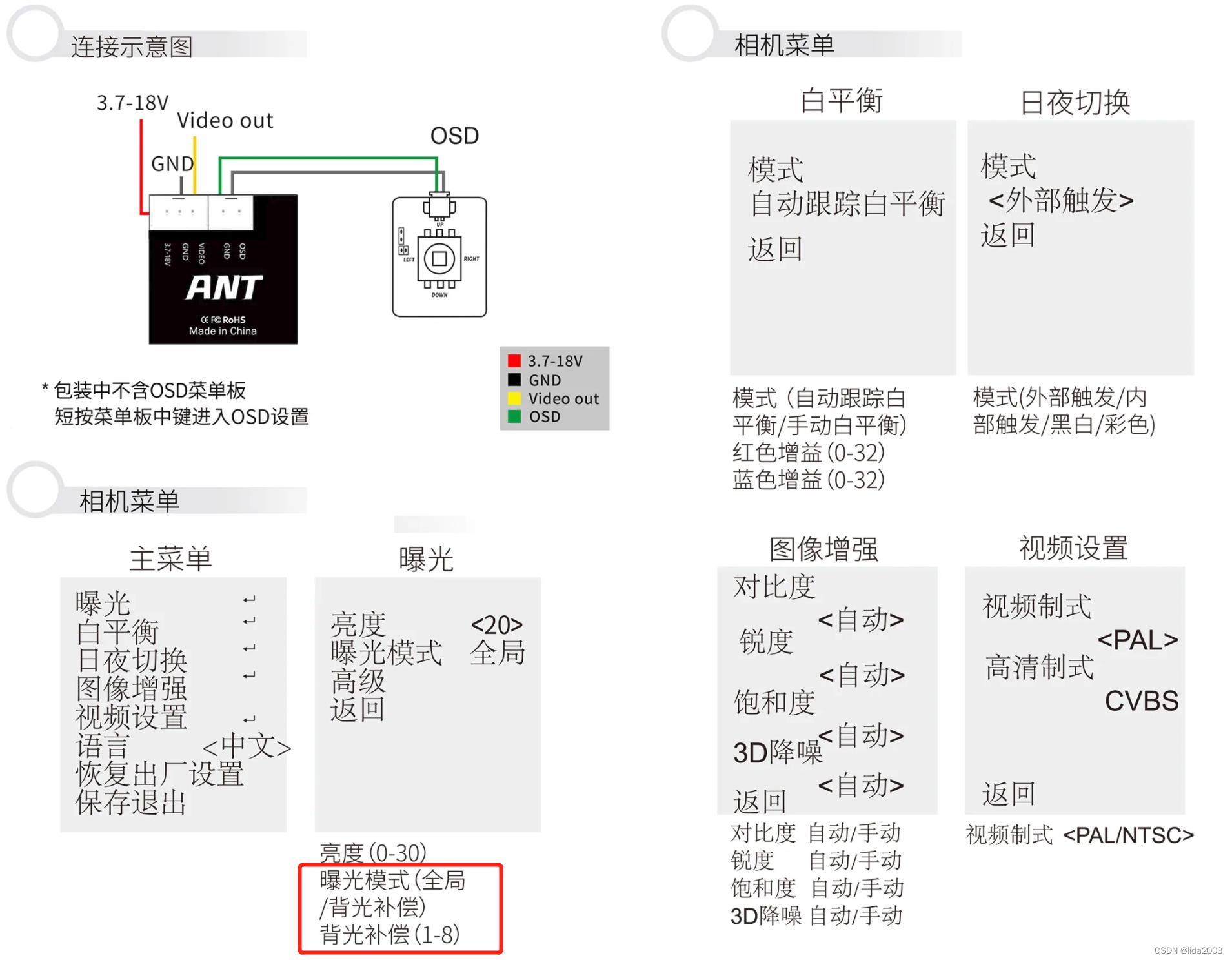
- FPV摄像头色彩,对比度,厂家自动方式感觉不理想
当前FPV视频,总体感觉图像细节不够,整体色彩度也不太好。
分析:可能是一早上,天不够亮;另外今天确实阴蒙蒙的,肉眼也看不太远。
- 解决方法一:换个好天气去试飞一圈
- 解决方法二:调整下曝光模式,考虑全局平衡 (当前采用背光补偿,自动)
4.2 改善及效果
- 第二次试飞效果(全局曝光+猪尾巴天线(放置机肚子位置,靠左前臂) + 晴朗早晨)
- 视野范围,部分阴暗区域太暗(摄像头无法及时调整)
- 由于天气原因色彩方面有不少改善
==》BetaFlight Mark4 + NorthCityPark (Second), DALPROP T5046C
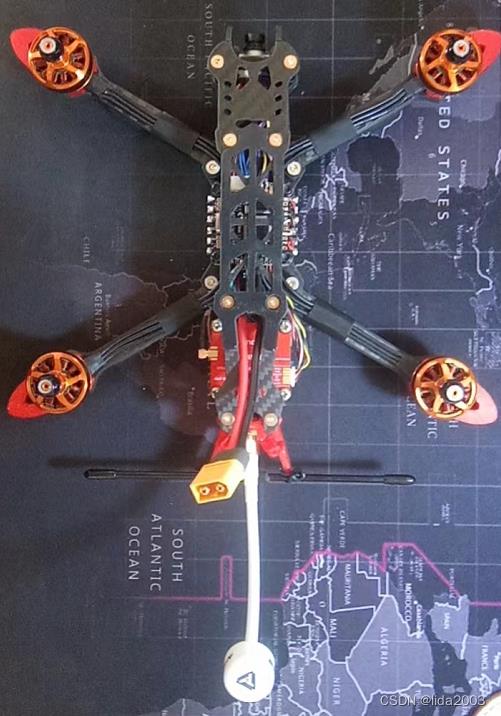
- 第三次试飞效果
最终 5.8GHz 图传天线 + 915MHz 接收机天线 安装方式如下图所示。
==》待测试,后续提供视频
4.3 后续改进计划
- 增加遥测距离
关于915MHzELRS拉距测试,始终没有最终完成过,后期需要安装GPS,增加RTH功能后进行验证。
- 增加航拍设备
FPV摄像头目前采用Caddx Ant 1200TVL 4:3 14x14mm
可以考虑以下几个选择:
- 更换其他更好的FPV摄像头
- 新增卡录设备(Gopro etc.)
上述遗留问题,后续有时间再进行验证和更新吧!
5. 参考资料
【1】四轴飞控DIY简明步骤介绍
【2】四轴飞控DIY集成FPV功能
【3】BetaFlight & BeeRotorF3 四轴飞行器配置F450
【4】关于穿越机FPV视频果冻效应的讨论
【5】穿越机用途和机架尺寸
【6】四轴FPV无人机手动操作简明介绍
【7】TX12 + ExpressLRS 915MHz RC控制链路配置及问题汇总
6. 补充信息
新买了一个测试用飞控板 AOCODA F405
- 考虑后续使用Kakute F7 AIO V1.5 测试PX4代码
- Kakute F7 AIO V1.5 不适合放置橡胶减震柱(效果好些),只能使用O型垫圈
- 配套的电调使用了四合一的电调板,为了简化焊接链接
鉴于上述考虑用了AOCODA F405的板子(相对F7/H7的飞塔,性价比高,且能达到实验目的)。
遇到三个主要问题:
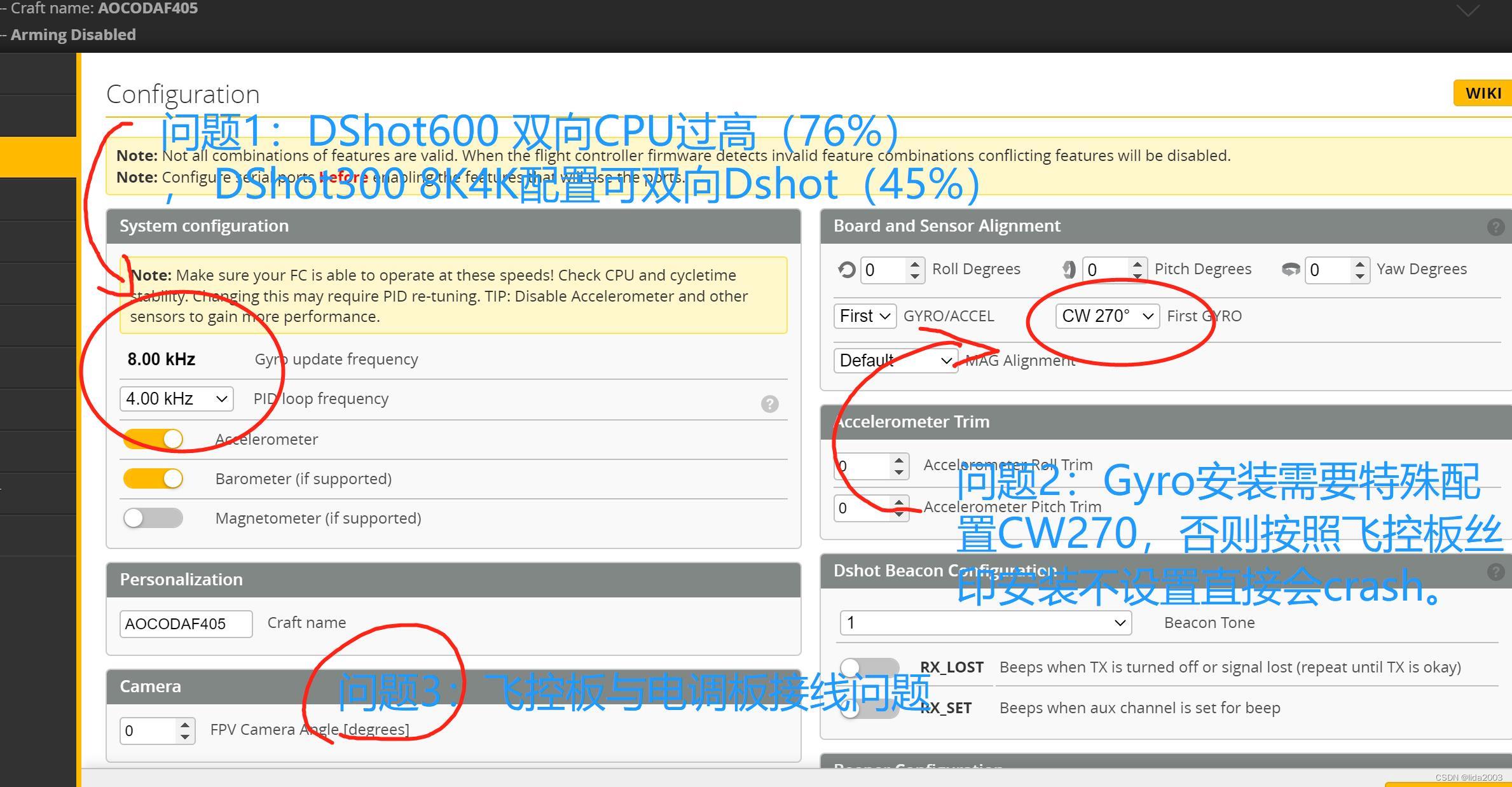
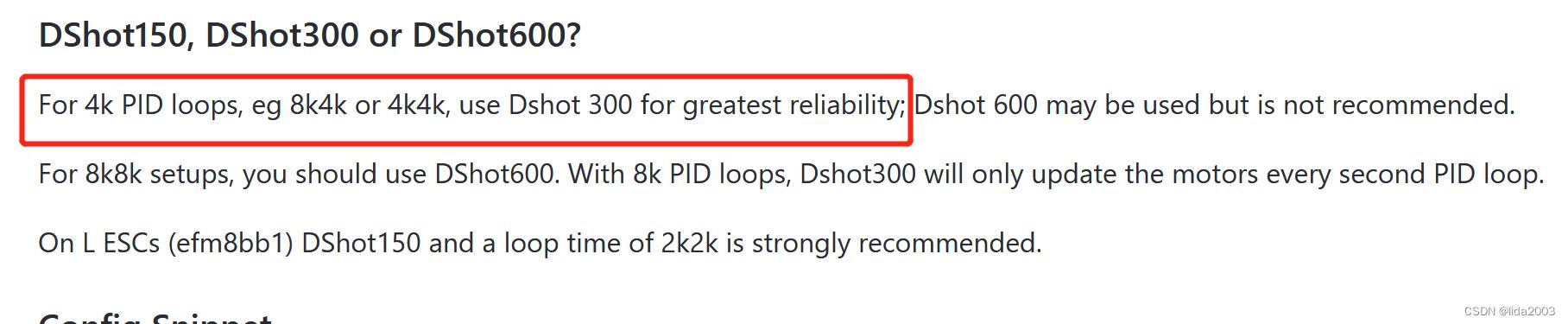
6.1 Dshot600双向通信CPU过高(>75%)
为了启用RPM filter,期望飞的时候更稳定些,所以就希望启用这个功能。但是F4保守设置 8K4K Bidirectional-DSHOT300。
注:BetaFlight Wiki: Bidirectional-DSHOT-and-RPM-Filter

6.2 Gyro需要特别配置CW270
遇到了非常奇葩的事情(也是自己不够小心,以为对应的固件,应该没问题,校准了以后就没有看IMU传感的测试),直接地面站刷了对应的固件版本,校准后就去试飞。
结果:失败,直接翻跟斗“Takeoff runaway”
经过分析、定位、FAE支持,最终确定是开源固件提供的飞控配置文件与到手的硬件版本不一致。
下载配置文件:SJET-AOCODAF405V1.config
整理AOCODA F405飞控以下硬件清单(git 3ead078):
- 硬件V1.0: SJET-AOCODAF405.config 来自git 3ead078
- 硬件V1.1: SJET-AOCODAF405V1.config, 来自CSDN自配置了一个版本,厂家确认是有该硬件出货
- 硬件V2.0: SJET-AOCODAF405V2.config 来自git 3ead078
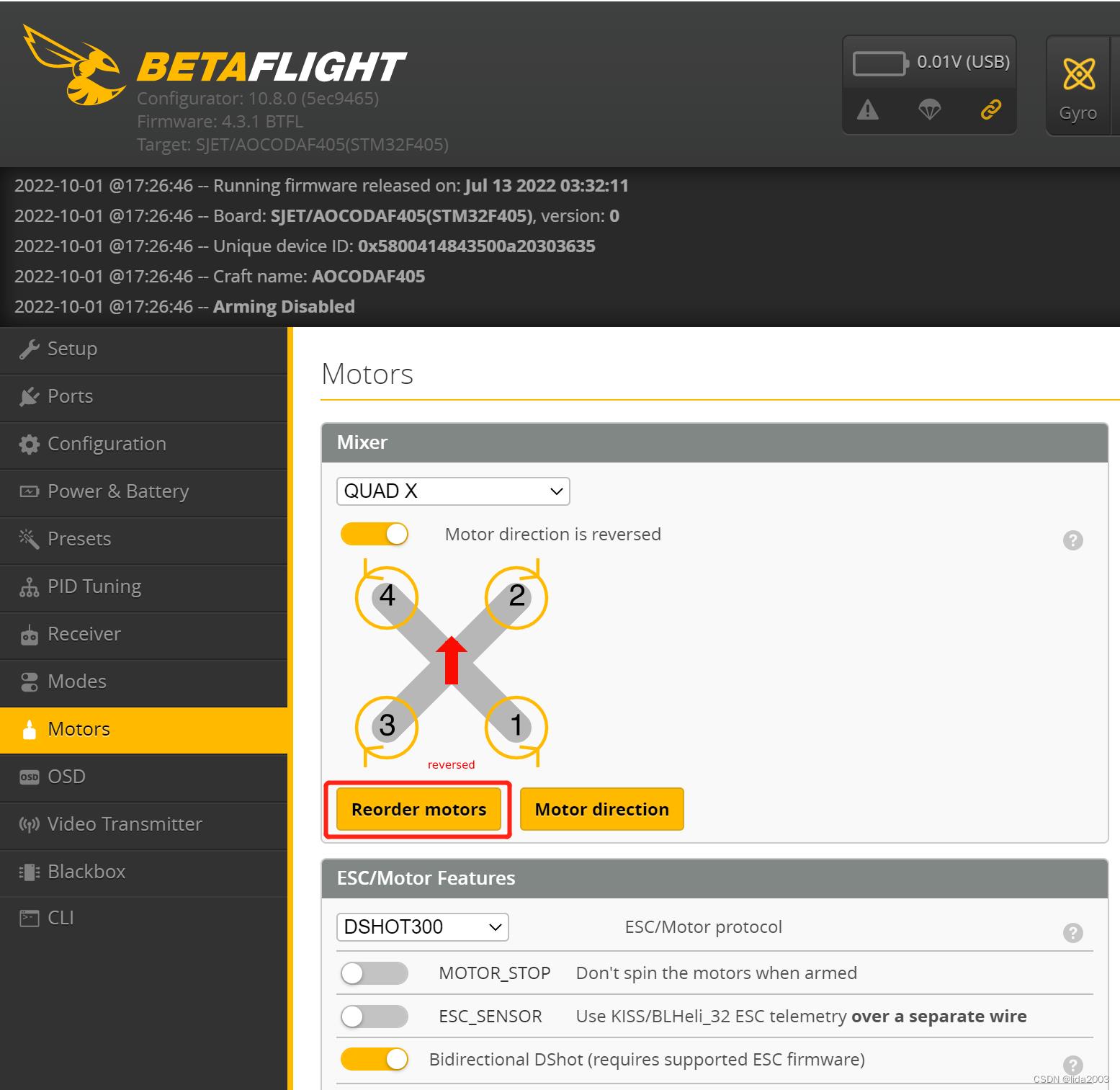
6.3 飞控与电调板之间的电机控制线接线错误
所有电机编号与电调板上印刷标记一一对应:
#1电机 对应 M1
#2电机 对应 M2
#3电机 对应 M3
#4电机 对应 M4
实际通过软件看到的控制效果展示的对应关系:
#1电机 对应 M4
#2电机 对应 M3
#3电机 对应 M2
#4电机 对应 M1
经过沟通分析,确认可能是飞控与电调板直接的控制信号线连接反序了,电源(正/负)接线正确。
解决方案:升级到最新BF 4.3.1 通过电机调序来适配硬件问题。(-- Oh my God!!!, What a day!!!–)
以上是关于四轴飞控DIY Mark4 - 减震的主要内容,如果未能解决你的问题,请参考以下文章