YOLOv5-6.0 源码解析 —— 卷积神经单元
Posted 荷碧·TZJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了YOLOv5-6.0 源码解析 —— 卷积神经单元相关的知识,希望对你有一定的参考价值。
YOLOv5 源码中,模型是依靠 yaml 文件建立的。而 yaml 文件中涉及到的卷积神经网络单元都是在 models 文件夹中的 common.py 声明的,所以自行设计网络结构之前有必要详解这个文件。这个文件很细节,就算不学 YOLOv5 也建议 copy 收藏
通用参数
| c1 | c2 | c_ | k | s | p | g | act | shortcut |
| 输入信号 通道 | 卷积产生 通道 | 隐藏层 通道 | 卷积核 尺寸 | 卷积 步长 | 边界 填充 | 卷积 组数 | 激活 函数 | 残差 连接 |
autopad
def autopad(k, p=None): # kernel, padding
# Pad to 'same'
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p- 如果有既定的 p 则直接 return
- 如果无设定的 p,则 return 使图像在卷积操作后尺寸不变的 p:
- 如果 k 是 5,则 p = 5 // 2 = 2
- 如果 k 是 (5, 5),则 p = (5, 5) // 2 = (2, 2)
Conv
标准卷积单元,记为 CBS
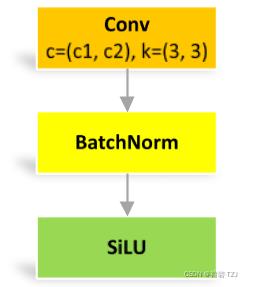
class Conv(nn.Module):
# Standard convolution
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p), groups=g, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = nn.SiLU() if act is True else (act if isinstance(act, nn.Module) else nn.Identity())
def forward(self, x):
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
return self.act(self.conv(x))DWConv
深度可分离卷积,继承自 Conv
不同点:卷积组数是 c1 和 c2 的最大公约数
class DWConv(Conv):
# Depth-wise convolution class
def __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)TransformerLayer
单头注意力:
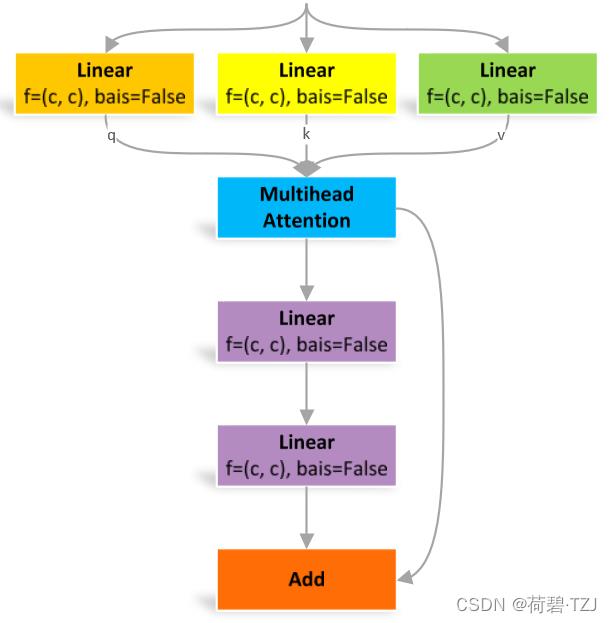
多头注意力:q, k, v 均是长度 c 的向量,单头注意力也是长度 c 的向量,n 的单头注意力拼接后得到长度 nc 的行向量。经过线性层运算后再得到长度 c 的向量
class TransformerLayer(nn.Module):
# Transformer layer https://arxiv.org/abs/2010.11929 (LayerNorm layers removed for better performance)
def __init__(self, c, num_heads):
super().__init__()
self.q = nn.Linear(c, c, bias=False)
self.k = nn.Linear(c, c, bias=False)
self.v = nn.Linear(c, c, bias=False)
self.ma = nn.MultiheadAttention(embed_dim=c, num_heads=num_heads)
self.fc1 = nn.Linear(c, c, bias=False)
self.fc2 = nn.Linear(c, c, bias=False)
def forward(self, x):
x = self.ma(self.q(x), self.k(x), self.v(x))[0] + x
x = self.fc2(self.fc1(x)) + x
return xTransformerBlock
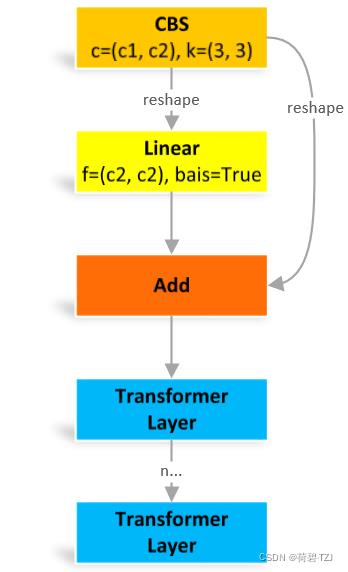
reshape:原图像是 [batch, channel, height, width],变换成 [height × width, batch, channel]
这个结构原本是用于自然语言处理的,但是据说用在图像处理有奇效就引入了。reshape 操作其实就是把图像中各个像素点看作一个单词,其对应通道的信息连在一起就是词向量,用自然语言处理的方法处理之后,再变回原来的图像结构
class TransformerBlock(nn.Module):
# Vision Transformer https://arxiv.org/abs/2010.11929
def __init__(self, c1, c2, num_heads, num_layers):
super().__init__()
self.conv = None
if c1 != c2:
self.conv = Conv(c1, c2)
self.linear = nn.Linear(c2, c2) # learnable position embedding
self.tr = nn.Sequential(*[TransformerLayer(c2, num_heads) for _ in range(num_layers)])
self.c2 = c2
def forward(self, x):
if self.conv is not None:
x = self.conv(x)
b, _, w, h = x.shape
p = x.flatten(2).unsqueeze(0).transpose(0, 3).squeeze(3)
return self.tr(p + self.linear(p)).unsqueeze(3).transpose(0, 3).reshape(b, self.c2, w, h)Bottleneck
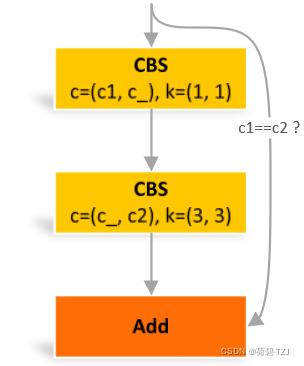
瓶颈卷积,其特点在于隐藏层的通道数 c_ 小于 c2
class Bottleneck(nn.Module):
# Standard bottleneck
def __init__(self, c1, c2, shortcut=True, g=1, e=0.5): # ch_in, ch_out, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_, c2, 3, 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))BottleneckCSP
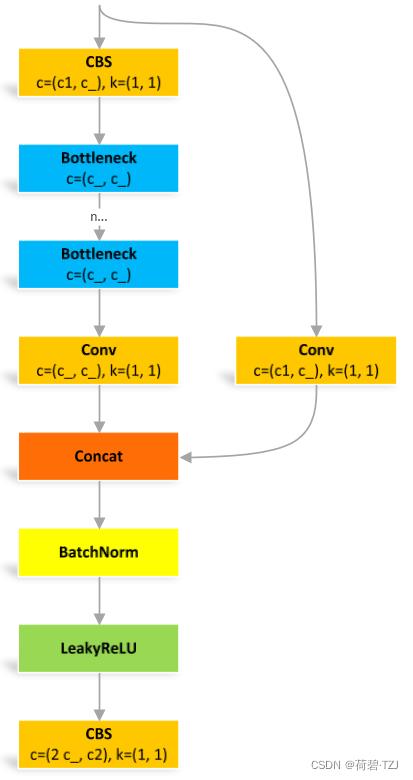
class BottleneckCSP(nn.Module):
# CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = nn.Conv2d(c1, c_, 1, 1, bias=False)
self.cv3 = nn.Conv2d(c_, c_, 1, 1, bias=False)
self.cv4 = Conv(2 * c_, c2, 1, 1)
self.bn = nn.BatchNorm2d(2 * c_) # applied to cat(cv2, cv3)
self.act = nn.LeakyReLU(0.1, inplace=True)
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
def forward(self, x):
y1 = self.cv3(self.m(self.cv1(x)))
y2 = self.cv2(x)
return self.cv4(self.act(self.bn(torch.cat((y1, y2), dim=1))))C3
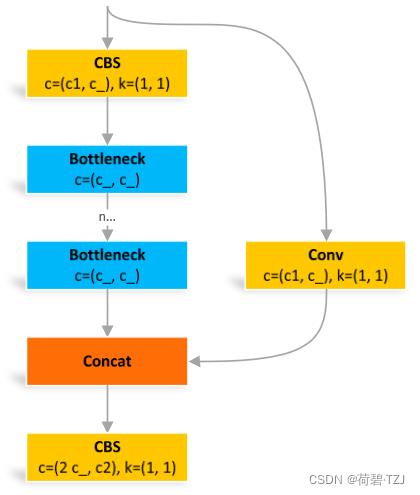
与 BottleneckCSP 类似,但少了 1 个 Conv、1 个 BN、1 个 Act,运算量更少
class C3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # act=FReLU(c2)
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
# self.m = nn.Sequential(*[CrossConv(c_, c_, 3, 1, g, 1.0, shortcut) for _ in range(n)])
def forward(self, x):
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))C3TR
继承自 C3,n 个 Bottleneck 更换为 1 个 TransformerBlock
class C3TR(C3):
# C3 module with TransformerBlock()
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e)
self.m = TransformerBlock(c_, c_, 4, n)C3SPP
继承自 C3,n 个 Bottleneck 更换为 1 个 SPP
class C3SPP(C3):
# C3 module with SPP()
def __init__(self, c1, c2, k=(5, 9, 13), n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e)
self.m = SPP(c_, c_, k)C3Ghost
继承自 C3,Bottleneck 更换为 GhostBottleneck
class C3Ghost(C3):
# C3 module with GhostBottleneck()
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
self.m = nn.Sequential(*[GhostBottleneck(c_, c_) for _ in range(n)])GhostConv
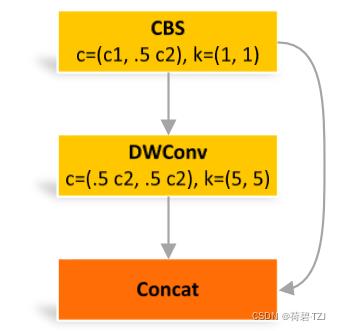
class GhostConv(nn.Module):
# Ghost Convolution https://github.com/huawei-noah/ghostnet
def __init__(self, c1, c2, k=1, s=1, g=1, act=True): # ch_in, ch_out, kernel, stride, groups
super().__init__()
c_ = c2 // 2 # hidden channels
self.cv1 = Conv(c1, c_, k, s, None, g, act)
self.cv2 = Conv(c_, c_, 5, 1, None, c_, act)
def forward(self, x):
y = self.cv1(x)
return torch.cat([y, self.cv2(y)], 1)GhostBottleneck
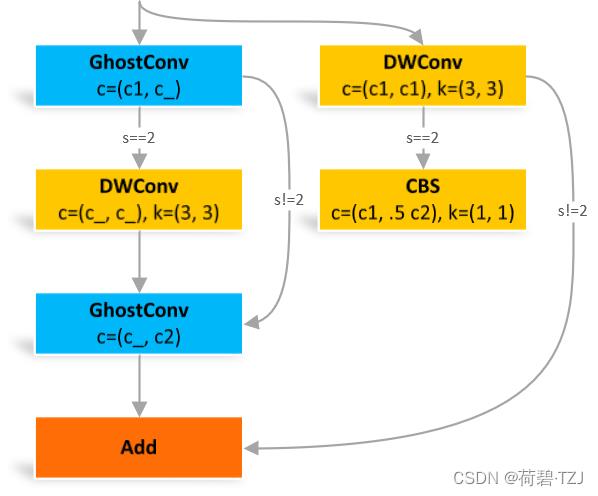
这个结构受步长 s 的影响较大,s = 2 时多了两个卷积
class GhostBottleneck(nn.Module):
# Ghost Bottleneck https://github.com/huawei-noah/ghostnet
def __init__(self, c1, c2, k=3, s=1): # ch_in, ch_out, kernel, stride
super().__init__()
c_ = c2 // 2
self.conv = nn.Sequential(GhostConv(c1, c_, 1, 1), # pw
DWConv(c_, c_, k, s, act=False) if s == 2 else nn.Identity(), # dw
GhostConv(c_, c2, 1, 1, act=False)) # pw-linear
self.shortcut = nn.Sequential(DWConv(c1, c1, k, s, act=False),
Conv(c1, c2, 1, 1, act=False)) if s == 2 else nn.Identity()
def forward(self, x):
return self.conv(x) + self.shortcut(x)SPP
空间金字塔池化
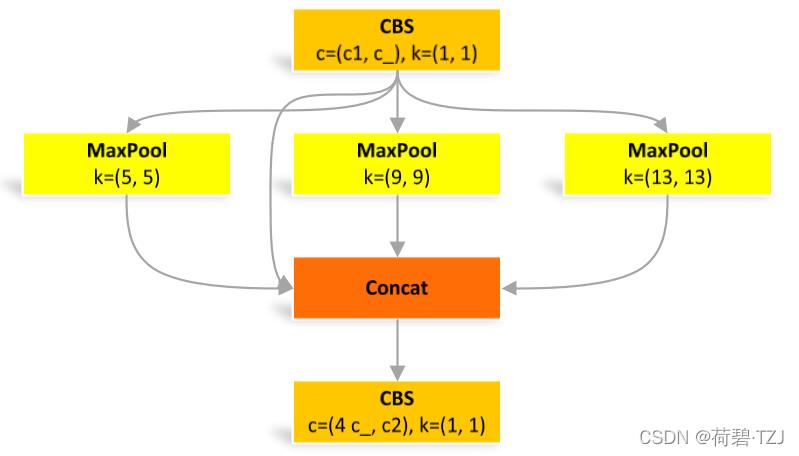
class SPP(nn.Module):
# Spatial Pyramid Pooling (SPP) layer https://arxiv.org/abs/1406.4729
def __init__(self, c1, c2, k=(5, 9, 13)):
super().__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * (len(k) + 1), c2, 1, 1)
self.m = nn.ModuleList([nn.MaxPool2d(kernel_size=x, stride=1, padding=x // 2) for x in k])
def forward(self, x):
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
return self.cv2(torch.cat([x] + [m(x) for m in self.m], 1))SPPF
快速版的空间金字塔池化
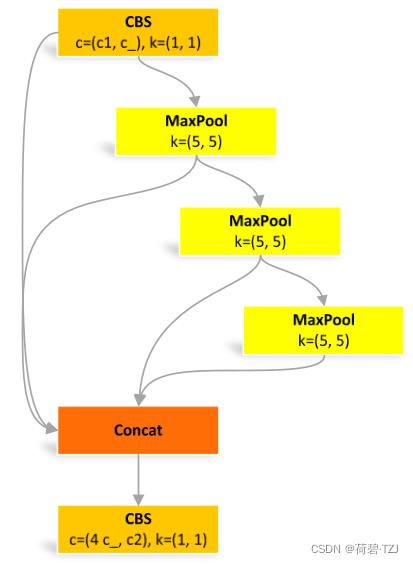
池化尺寸等价于:5、9、13,和原来一样
但是运算量从原来的  减少到了
减少到了 
class SPPF(nn.Module):
# Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher
def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13))
super().__init__()
c_ = c1 // 2 # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c_ * 4, c2, 1, 1)
self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2)
def forward(self, x):
x = self.cv1(x)
with warnings.catch_warnings():
warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning
y1 = self.m(x)
y2 = self.m(y1)
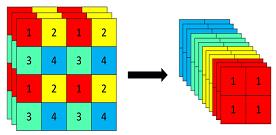
return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))Focus
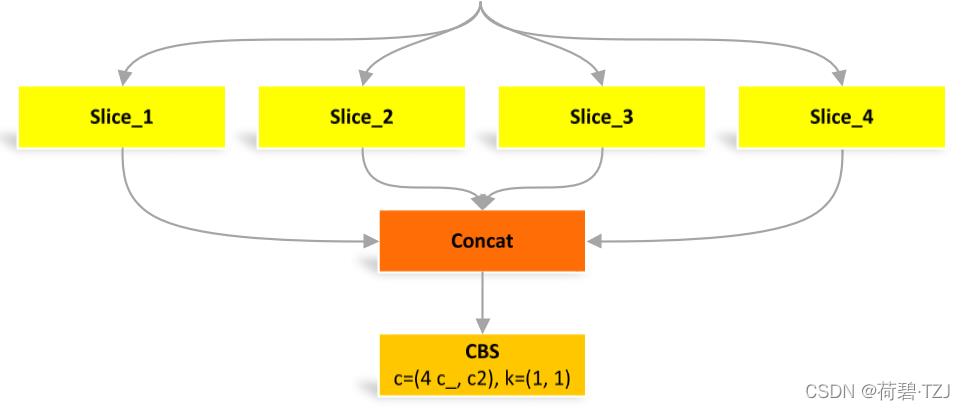
四个 Slice 是由图像在像素位置上分割出来的
class Focus(nn.Module):
# Focus wh information into c-space
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, act=True): # ch_in, ch_out, kernel, stride, padding, groups
super().__init__()
self.conv = Conv(c1 * 4, c2, k, s, p, g, act)
# self.contract = Contract(gain=2)
def forward(self, x): # x(b,c,w,h) -> y(b,4c,w/2,h/2)
return self.conv(torch.cat([x[..., ::2, ::2], x[..., 1::2, ::2], x[..., ::2, 1::2], x[..., 1::2, 1::2]], 1))
# return self.conv(self.contract(x))Contrast
当 gain = 2 的时候,(64, 80, 80) 的图像 -> (256, 40, 40) 的图像。其操作类似 Focus,但更灵活,相比之下少了一个卷积
class Contract(nn.Module):
# Contract width-height into channels, i.e. x(1,64,80,80) to x(1,256,40,40)
def __init__(self, gain=2):
super().__init__()
self.gain = gain
def forward(self, x):
b, c, h, w = x.size() # assert (h / s == 0) and (W / s == 0), 'Indivisible gain'
s = self.gain
x = x.view(b, c, h // s, s, w // s, s) # x(1,64,40,2,40,2)
x = x.permute(0, 3, 5, 1, 2, 4).contiguous() # x(1,2,2,64,40,40)
return x.view(b, c * s * s, h // s, w // s) # x(1,256,40,40)Expand
当 gain = 2 的时候,(1,64,80,80) 的图像 -> (1,16,160,160) 的图像。是 Contrast 的逆操作
class Expand(nn.Module):
# Expand channels into width-height, i.e. x(1,64,80,80) to x(1,16,160,160)
def __init__(self, gain=2):
super().__init__()
self.gain = gain
def forward(self, x):
b, c, h, w = x.size() # assert C / s ** 2 == 0, 'Indivisible gain'
s = self.gain
x = x.view(b, s, s, c // s ** 2, h, w) # x(1,2,2,16,80,80)
x = x.permute(0, 3, 4, 1, 5, 2).contiguous() # x(1,16,80,2,80,2)
return x.view(b, c // s ** 2, h * s, w * s) # x(1,16,160,160)Concat
当 dimension = 1 时,将多张相同尺寸的图像在通道维度上拼接 (通道数可不同)
class Concat(nn.Module):
# Concatenate a list of tensors along dimension
def __init__(self, dimension=1):
super().__init__()
self.d = dimension
def forward(self, x):
return torch.cat(x, self.d)以上是关于YOLOv5-6.0 源码解析 —— 卷积神经单元的主要内容,如果未能解决你的问题,请参考以下文章
GRU时序预测基于matlab卷积神经网络结合门控循环单元CNN-GRU时间序列预测含Matlab源码 2287期
GRU回归预测基于matlab卷积神经网络结合门控循环单元CNN-GRU数据预测(多输入单输出)含Matlab期源码 2274期
TCN回归预测基于matlab TCN时间卷积神经网络数据回归预测(多输入单输出)含Matlab源码 2317期
TCN回归预测基于matlab TCN时间卷积神经网络数据回归预测(多输入单输出)含Matlab源码 2317期
GRU回归预测基于matlab鲸鱼算法优化门控循环单元WOA-GRU神经网络回归预测(多输入单输出)含Matlab源码 2285期
GRU回归预测基于matlab粒子群算法优化门控循环单元PSO-GRU神经网络回归预测(多输入单输出)含Matlab源码 2286期