TPL5010硬件看门狗电路
Posted zxm8513
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了TPL5010硬件看门狗电路相关的知识,希望对你有一定的参考价值。
在做一些采集频率很低的产品的时候,会考虑电池供电,比如表、电气表等,为了控制功耗,往往会在设备不需要工作的时候让它进入低功耗模式。
为了设备的稳定性,避免死机后无法恢复,必须配置看门狗,一般的看门狗芯片,喂狗间隔时间是几秒钟。
这样在喂狗和低功耗之间就产生了一个矛盾,频繁的喂狗就需要频繁的醒过来,这样功耗就很难做到很低。
这颗看门狗芯片,喂狗间隔0.1秒到2小时可调,电压为 2.5V 时, 电流消耗为 35nA(典型值),特别适合上面的应用。
2小时的间隔意味着主控芯片每2小时醒过来喂狗一次即可,而在2.5V供电的情况下,功耗仅仅35nA,几乎可以忽略不计
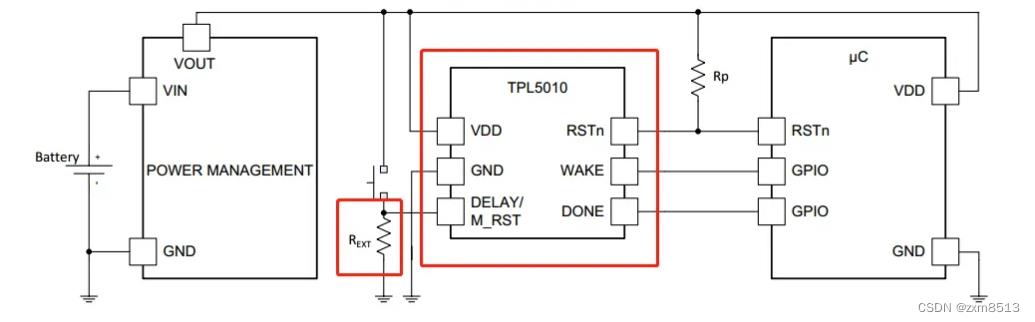
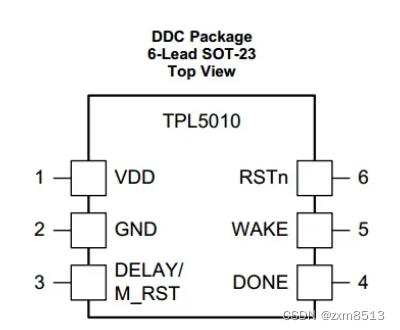
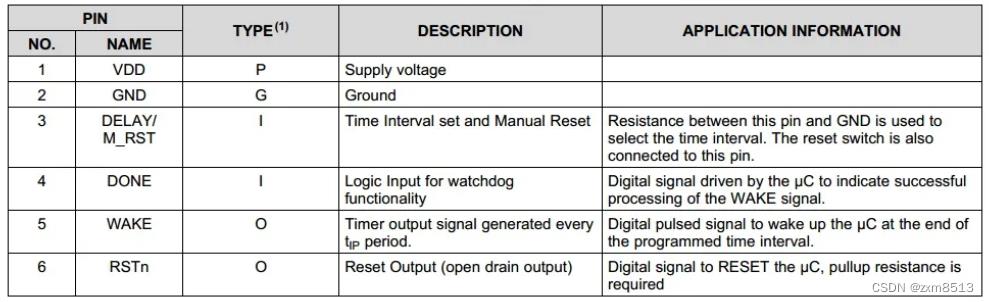
引脚说明
1:供电
2:GND
3:可以通过调整下拉电阻的阻值,来实现不同看门狗间隔
4:输入,喂狗的引脚
5:输出,可以定时唤醒主控设备
6:复位引脚,如果没有喂狗,通过这个脚复位主控
特性
- 电源电压范围为 1.8V 至 5.5V
- 电压为 2.5V 时, 电流消耗为 35nA(典型值)
- 可选计时间隔: 100ms 至 7200s
- 计时器精度: 1%(典型值)
- 可通过电阻选择时间间隔
- 看门狗功能
- 手动复位
应用
- 电池供电系统
- 物联网 (IoT)
- 出入探测
- 篡改检测
- 家庭自动化传感器
- 温度调节装置
- 消费类电子产品
- 远程传感器
- 白色家电
说明
- TPL5010 纳瓦级计时器是一款超低功耗计时器, 其看门狗功能专为占空比、 电池供电型 应用 (比如物联网中的应用) 中的系统唤醒功能而设计。 其中许多 应用需要使用 μC, 因此, 通常希望将 μC 维持在低功耗模式以更大限度节省电流, 而仅在某些时间间隔内唤醒以收集数据或为中断提供服务。 虽然 μC 的内部计时器可用于系统唤醒, 但它可能单独消耗数微安的总系统电流。
- TPL5010 仅消耗 35nA, 可替代集成式 μC 计时器的功能。 这样就可将 μC 置于低得多的功耗模式, 将内部计时器关闭, 并在被 TPL5010 中断时仅返回到激活模式。
- TPL5010 通过提供近两个数量级的功率节省, 可以大幅减小能量采集或无线传感器 应用中所使用的电池尺寸。
- TPL5010 提供 100ms 至 7200s 的可选时间间隔, 适用于中断驱动型 应用。 出于安全考虑, 某些标准(如 EN50271) 要求实现看门狗功能。
- TPL5010不仅实现了看门狗功能, 而且几乎没有增加功耗。
- TPL5010 采用 6 引脚小外形尺寸晶体管 (SOT23) 封装。
RK3399驱动开发 | 02 - 使用Linux自带的硬件看门狗驱动(SGM706B)
一、SGM706
SGM706是一种集成微处理器的监控装置。 与使用单个集成电路或分立元件的设计相比,这种集成设计具有提高系统稳定性和准确性的优点。 SGM706可以在上电、下电甚至降压断电的情况下进行复位。 当VCC低至1V时,复位输出仍然可以工作。 它还具有低电平主动手动复位(MR)功能。

SGM706提供独立的看门狗监控电路,当电源输入超过1.6s没有切换时,可以激活该功能。
当电源故障,电池电量低,或需要监控额外电源时,可以通过SGM706的1.25V阈值检测器实现。
引脚描述如下:
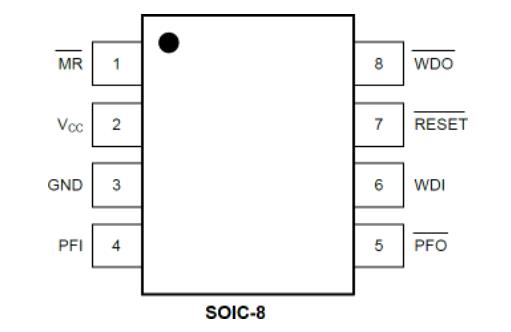
| 引脚 | 作用 |
|---|---|
| MR | 手动复位输入引脚 |
| VCC | 电源引脚 |
| GND | 电源引脚 |
| PFI | Power-Fail Voltage Monitor输入脚,当PFI低于1.25V时,PFO引脚会拉低 |
| PFO | Power-Fail Voltage Monitor输出引脚,PFI电平高于1.25V时,PFO会保持高电平 |
| WDI | 看门狗输入引脚,如果WDI引脚超过1.6s电平没有变化, |
| RESET | 复位输出引脚,低电平有效 |
| WDO | 看门狗输入引脚,如果WDI引脚超过1.6s保持低电平,WDO引脚变为低电平。WDO引脚与RESET的引脚是它没有最小脉冲宽度。一旦VCC比reset引脚电平高,WDO电平立即变高 |
开发板原理图如下:
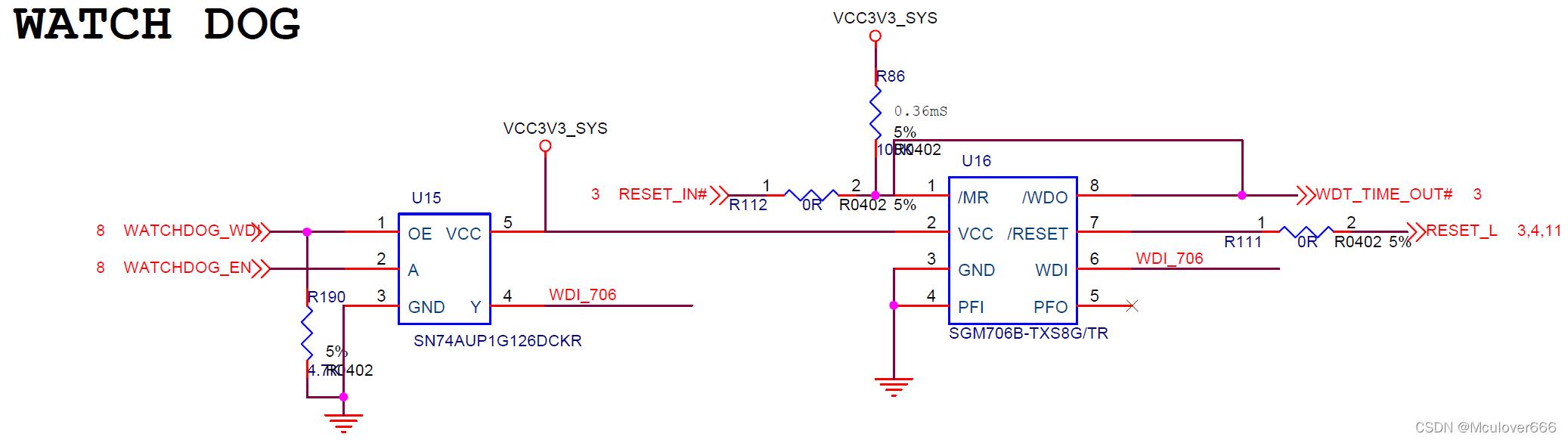
当 WATCHDOG_WDI 引脚为低时,将三态门芯片的OE引脚拉低时,三态门未使能,输出引脚Y电平为高阻态,此时看门狗的输入引脚WDI为高阻态,所有看门狗芯片内部定时器清零。
当 WATCHDOG_WDI 引脚为高时,将三态门芯片的OE引脚拉高时,三态门使能,输出引脚Y电平取决于输入引脚A,为高电平或低电平,此时看门狗开始工作,如果WDI引脚电平超过1.6s未变化,则看门狗超时,拉低WDO引脚,使RK3399复位。
二、添加设备树节点
1. 设置引脚复用

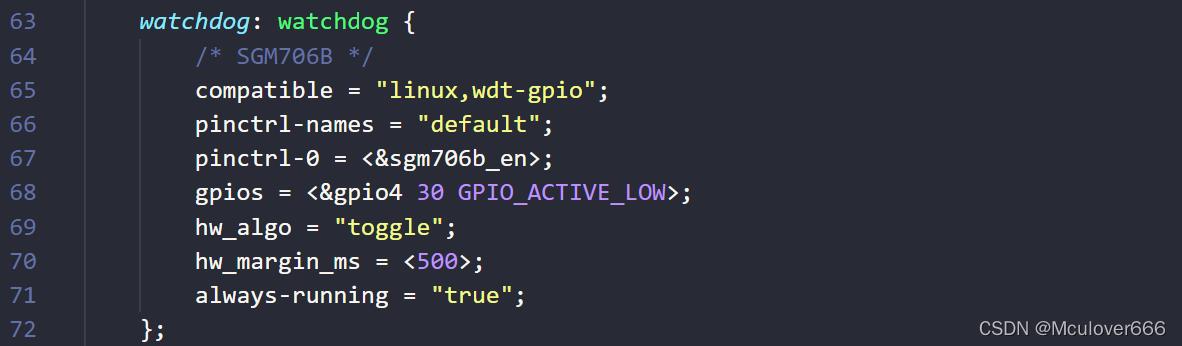
2. 添加硬件看门狗节点
描述文档为:Documentation/devicetree/bindings/watchdog/gpio-wdt.txt。
三、使能Linux内核硬件看门狗驱动
1. 使能驱动模块编译
Linux内核提供的硬件看门狗驱动为drivers/watchdog/gpio_wdt.c,查看其Makefile:
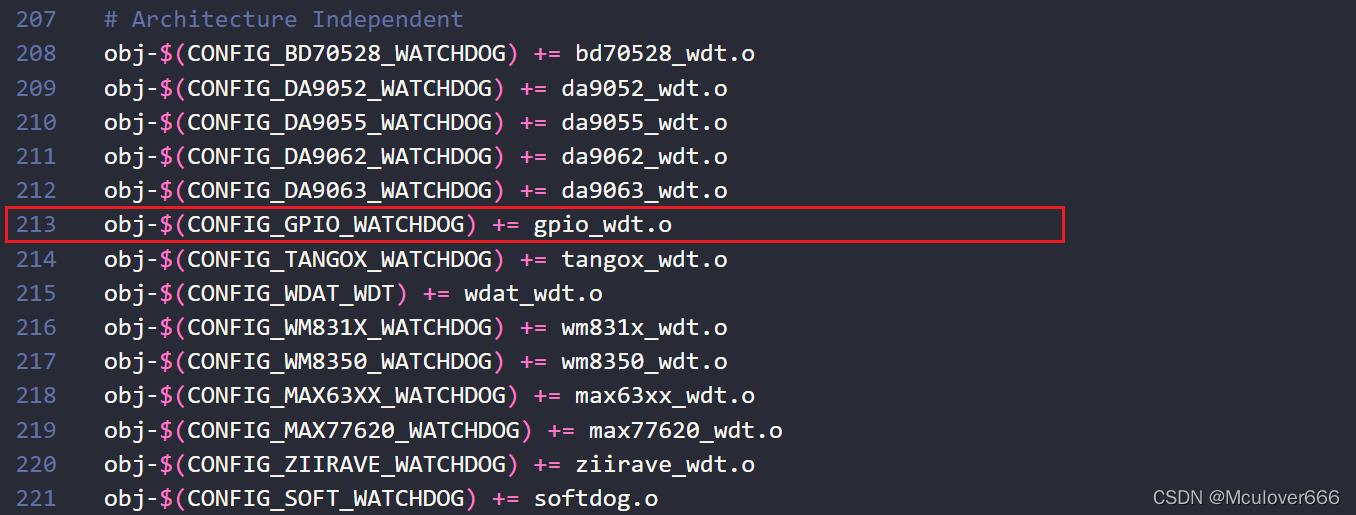
所以要使能宏定义CONFIG_GPIO_WATCHDOG,才会将编译该驱动模块,在开发板配置文件中将其编译为模块:
CONFIG_GPIO_WATCHDOG=m
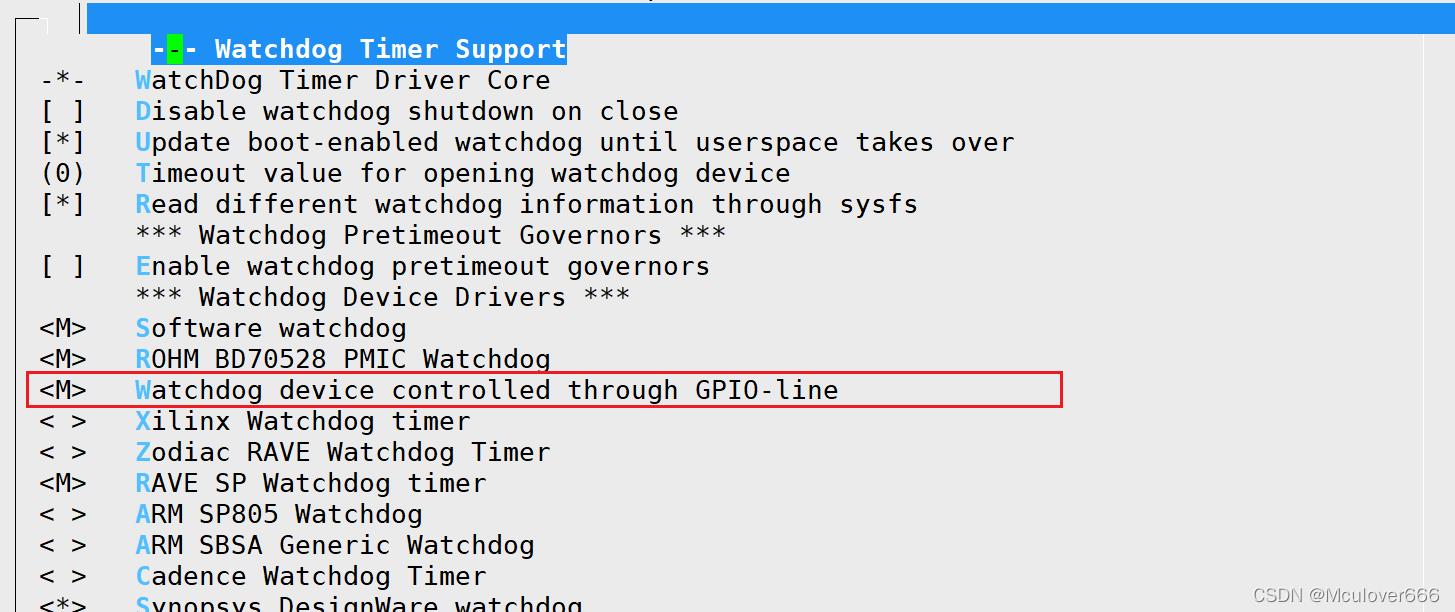
在Device Driver->Watchdog Timer Support中:
四、使用
加载驱动模块:
insmod ./gpio_wdt.ko
可以看到多了看门狗设备节点:

因为设备树中设置了 always-running 属性,所以一旦驱动加载,看门狗模块就会一直运行。
此时如果使能三态门芯片,可以看到看门狗芯片开始工作,系统不会复位。
以上是关于TPL5010硬件看门狗电路的主要内容,如果未能解决你的问题,请参考以下文章
RK3399驱动开发 | 02 - 使用Linux自带的硬件看门狗驱动(SGM706B)