机器人工程毕业设计☞开题报告
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人工程毕业设计☞开题报告相关的知识,希望对你有一定的参考价值。
开题报告的撰写非常重要,同时同步完成的还有:
有学生朋友5-6次沟通后,仍然出现一些不规范的情况。
此处,以如下案例进行说明:
室内机器人区域覆盖算法仿真测试平台设计与实现
题目给出要素:
- 机器人工作环境为室内
- 算法是区域覆盖-类似扫地机器人
- 任务是仿真测试平台设计与实现
通俗一点,就是一个关于扫地机器人类似任务的仿真平台测试区域覆盖算法。
课题的目的和意义:
需要涉及三个方面:
- 室内扫地机器人的目的和意义
- 区域覆盖算法是核心,研究的目的和意义
- 为何不选实物而是用仿真测试,有何优点,也是目的和意义
此部分就是为何要做这个课题。
1.室内机器人市场需求
《2021年家电市场总结及2022年趋势展望》系列报告显示2021年清洁电器全渠道零售额309亿元,同比增长28.9%,零售量2980万台,同比增长2.6%,清洁电器呈快速增长态势。作为清洁电器占比最大的品类之一,扫地机器人表现尤为突出。近几年,扫地机器人的产品功能逐渐完善,逐渐摆脱“人工智障”称号,市场接受度迅速提高。扫地机器人其实并非新兴物种,它的诞生甚至可以追溯到20世纪末。但长期以来,由于其产品体验感不尽人意、产品功能不够完善、工作不够“聪明”、无法解决“用户痛点”,饱受诟病,被称为“人工智障”。过去的产品力缺陷主要对应扫地机器人的导航技术、避障技术及清洁技术局限性,新兴企业如石头科技、云鲸等强势崛起,不断创新迭代技术,扫地机进入从“能用”到“好用”的渐进式创新阶段,国内扫地机器人市场迎来高增长。[补充参考文献1,后续列入参考文献中]
此处自然过渡到室内机器人的核心是什么,承前启后。请注意,注释部分不要复制到开题报告中!!!
2. 提及核心技术点并过渡到区域覆盖算法
导航方面,2015年,iRobot推出业内首个同时搭载LDS SLAM激光加VSLAM视觉的多传感器融合方案。清洁技术方面,2019年,刚入局扫地机领域的云鲸带着“拖布自清洁技术”进入市场,创新性的可自清洁抹布功能及扫地机器人基站模式,带动了全行业产品的升级。2021年,各厂商陆续跟进了拖布自清洁功能,并在此基础上实现新的功能迭代。老牌企业科沃斯推出集自动回洗拖布、自动集尘、自动补水等功能于一体的集成模块基站;石头创新采用“洗刮刷”的技术路径实现基站自清洁、采用高频震动的拖地模式提升拖地清洁效果;云鲸则继续聚焦拖地维度,突破自动上下水技术,实现了自动清洁拖布、烘干拖布、自动换水、自动添加清洁液等功能,率先实现拖地场景的全流程无需人工介入的用户体验。在各大厂商的努力下,扫地机器人变得愈加智能和自动化,市场热度日渐增长。[补充参考文献2,后续列入参考文献中]
在室内服务机器人核心技术中,区域覆盖算法一直是研究热点和重中之重。(过渡)全覆盖路径规划是指找到一条经过封闭区域中所有可达位置的路径,并且机器人沿着这条路径进行移动需要满足某些性能最优或者较优。全覆盖路径规划技术广泛的应用于各个领域,如日常生活中的地面清扫和自主割草、军事领域中的军事侦察和扫雷除险等。[补充参考文献3,后续列入参考文献中]
3. 为何用仿真
近年来仿真技术的飞速发展,使得机器人算法研发成本快速降低。……[补充参考文献4,后续列入参考文献中]
4. 总结一下
综上所述,可以看出扫地机器人为代表的室内机器人在未来将会更加普及,全覆盖路径规划算法作为其核心部分必须能够适应更加复杂的环境并且具有较好的性能。本文的目的则是设计一种能够应用于封闭未知复杂环境下的路径全覆盖算法仿真测试平台,同时具有较好的性能,以节约室内服务机器人的算法研发成本,从而获得更高的经济效益。
课题研究的主要内容:
(论文提纲)并不是论文目录!!!
本课题的主要研究目标是设计一种能够很好的应用于封闭未知环境下的全覆盖路径规划算法仿真测试平台,并通过相应的仿真实验对测试算法的性能进行验证。围绕着上述研究目标,本文的主要研究内容可以归结为以下五个问题:机器人建模问题、环境建模问题、区域覆盖算法的测试问题、路径全覆盖算法的优化问题(可选)。下面对这四个核心内容进行简要分析。
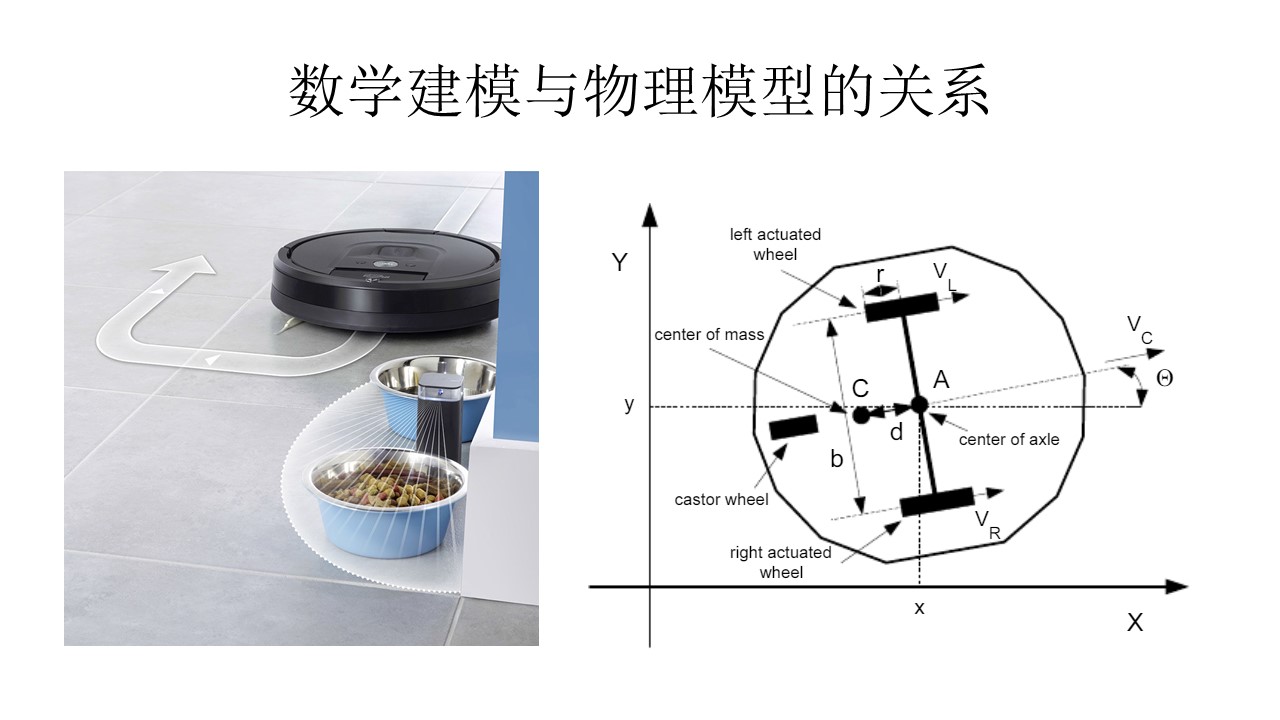
1. 机器人建模问题
现代控制理论已经讲过了,分析到机器人运动学模型就可以。
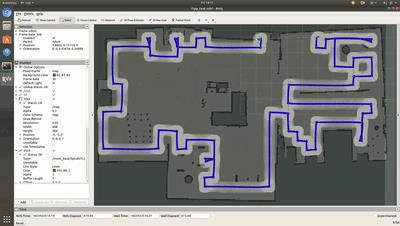
2. 环境建模问题
环境建模博客也讲过了。提示如下:
本课题的环境建模问题就是选择何种环境建模方式去构建机器人的工作空间模型,所以就需要通过分析常见的环境建模方式的优缺点,然后根据本课题算法的测试需要挑选出合适的环境建模方式。为此,本课题分析了拓扑法、可视图法、自由空间法和栅格法的相关知识,栅格法因其原理简单、易于路径规划算法实现等优点被选为本课题的环境建模方式。在选定环境建模方式之后,又对不规则障碍物的规则化处理方式和栅格法表示方法的改进原理进行了研究。
3. 区域覆盖算法的测试问题
由于本课题算法应用于封闭未知环境下,所以在区域衔接路径规划算法的研究中,采用全局路径规划和局部路径规划相结合的方式进行实现。测试也围绕上述问题进行仿真实验。

服务型移动机器人如何实现室内路径全覆盖清扫给你一个清爽干净的家
4. 路径全覆盖算法的优化问题(可选)
如果第4个不选就是三点,选就是四点。
提示如下:
在实际应用中,室内机器人对工作空间进行首次覆盖时,环境空间信息基本上是完全未知的。但是,当再次对此工作空间进行全覆盖时,环境信息就变成已知了。面对这种改变,本课题对全覆盖路径进行了全局优化,使其性能变得更好。除此之外,环境中可能出现一些搬动障碍物导致工作空间发生变化,因此本课题制定了相应的局部优化策略对路径进行实时调整以适应上述变化。上述全局优化策略和局部优化策略共同构成本课题算法的优化机制。充分体现算法仿真测试通用型和高效性。
如果能配合图示更好,参考如下:
以下内容是注释:
开题报告结构与最后论文的关系
课题的目的和意义基本对应最后论文的第一章。
课题研究的主要内容基本一点对应一章,也就是论文第二三四章等。
完成此部分对论文和课题基本从了解到理解,完成课题就胸有成竹了。
一份好的开题报告非常重要!
文献检索及参考文献目录:
此部分非常重要,依据参考过具体文献如实填写。
最好将文献标注于引用位置。
[1] Hasan K M, Abdullah-Al-Nahid, Reza K J. Path planning algorithm development for autonomous vacuum cleaner robots[C]. proceedings of the International Conference on Informatics. 2014.
[2] 陈鹏. 移动机器人全遍历覆盖路径规划研究[D]. 山东理工大学, 2014.
[3] 朱宝艳. 移动机器人全覆盖遍历路径规划算法研究[D]. 山东理工大学, 2017.
[4] 赵蕾. 未知环境下全覆盖路径规划问题的研究[D]. 南昌大学, 2016.
[5] Habib M A, Alam M S, Siddique N H. Optimizing coverage performance of multiple random path-planning robots[J]. Paladyn, 2012, 3(1): 11-22.
[6] 陈逸怀, 朱博. 基于单元分解法的移动机器人遍历路径规划[J]. 装备制造技术, 2014, (04): 148-149+152.
[7] 赵晓东, 鲍方. 清洁机器人路径规划算法研究综述[J]. 机电工程, 2013, 30(11): 1440-1444.
[8] 李淑霞, 杨俊成. 一种室内清扫机器人路径规划算法[J]. 计算机系统应用, 2014, 23(09): 170-172.
[9] Yang S X, Meng M. Neural network approaches to dynamic collision-free trajectory generation[J]. Systems Man & Cybernetics Part B Cybernetics IEEE Transactions on, 2001, 31(3): 302-318.
课题研究的基础、现状与趋势:
(基于对参考文献资料的分析、综合与归纳,不少于1000字)
这部分非常重要,是对参考文献的归纳和总结。
由于时间关系,此处只列出一点,加以说明。
到目前为止,国内外学者已经提出了很多全覆盖路径规划算法,如随机方法[1]、模板模型法、单元分解法、规划式覆盖算法、神经网络算法和生成树算法等[2, 3, 4]。
[1] Hasan K M, Abdullah-Al-Nahid, Reza K J. Path planning algorithm development for autonomous vacuum cleaner robots[C]. proceedings of the International Conference on Informatics. 2014.
[2] 陈鹏. 移动机器人全遍历覆盖路径规划研究[D]. 山东理工大学, 2014.
[3] 朱宝艳. 移动机器人全覆盖遍历路径规划算法研究[D]. 山东理工大学, 2017.
[4] 赵蕾. 未知环境下全覆盖路径规划问题的研究[D]. 南昌大学, 2016.
2012 年 Habib 等人[5]提出的随机方法使用简单,不需要环境空间模型;但是其覆盖效率较低,并且无法保证工作空间的全覆盖。
[5] Habib M A, Alam M S, Siddique N H. Optimizing coverage performance of multiple random path-planning robots[J]. Paladyn, 2012, 3(1): 11-22.
2014 年陈逸怀和朱博[6]提出了单元分解法,该方法使得全覆盖实现的难度得到降低且具有较高的覆盖精度;但是比较依赖环境,复杂环境下单元分解比较困难且覆盖重复率较高。
[6] 陈逸怀, 朱博. 基于单元分解法的移动机器人遍历路径规划[J]. 装备制造技术, 2014, (04): 148-149+152.
赵晓东和鲍方等人[7]在 2013 年提出了规划式覆盖算法,算法实现简单且对环境地图的精度要求较低,但是应用范围有限,只能应用于已知或者局部未知的环境中,并且在复杂环境下的搜索难度较大。
[7] 赵晓东, 鲍方. 清洁机器人路径规划算法研究综述[J]. 机电工程, 2013, 30(11): 1440-1444.
2014 年李淑霞和杨俊成等人[8]提出了生成树算法,该算法具有覆盖过程耗时较少和重复覆盖率较低等优点;但是由于生成树算法是应用了树的相关思想,因此数据结构较复杂。
[8] 李淑霞, 杨俊成. 一种室内清扫机器人路径规划算法[J]. 计算机系统应用, 2014, 23(09): 170-172.
2001 年 Yang 和 Meng[9]提出的神经网络算法不仅能够适应于不同的环境,还能够规划出较好的路径;但是对于这类算法需要学习的过程,同时具有较大的运算量。
[9] Yang S X, Meng M. Neural network approaches to dynamic collision-free trajectory generation[J]. Systems Man & Cybernetics Part B Cybernetics IEEE Transactions on, 2001, 31(3): 302-318.
时间关系此处只作为演示,文献最好以近3-5年为宜进行分析。
参考文献:李楷. 封闭未知环境下扫地机器人的路径全覆盖优化算法研究[D].华中科技大学, 2019. DOI:10.27157/d.cnki.ghzku.2019.001940.
本课题解决思路或实验方法:
随着智能家居时代的到来,室内机器人的发展备受人们的关注。由于室内机器人经常工作于封闭未知复杂环境中,且环境可能存在一些变化,如室内桌椅的搬动,所以自动实现环境区域的全覆盖比较困难,制约了室内机器人的发展。为此,本课题面向封闭未知环境,对室内机器人的全覆盖路径规划技术及仿真平台进行了深入研究。
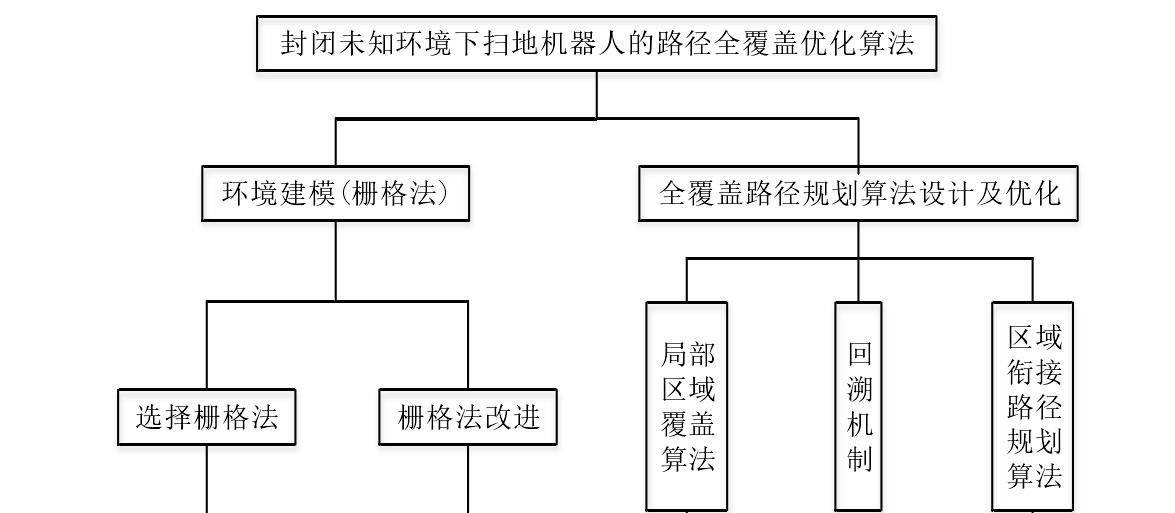
1. 本课题首先分析了室内机器人及其环境建模问题。通过几种常用环境建模方式优缺点的对比,选择比较适合本课题研究内容的栅格法进行环境建模。然后,针对本课题工作环境的特点,对栅格法进行了改进。
2. 由于环境比较复杂,所以本课题采取分区域覆盖的策略。室内机器人完成当前局部子区域的覆盖之后,需要切换到未覆盖子区域继续工作。为此,本课题首先建立了一种回溯机制,用于未覆盖子区域的记录和为区域衔接路径选取目标点。然后,对区域衔接路径规划算法进行了设计。由于此算法工作的环境可能存在未知部分,所以本课题首先对覆盖算法进行了改进,并用于全局路径规划中;当遇到局部未知环境时,采用滚动窗口算法进行局部路径规划;最后,采用曲线对规划出来的路径进行拟合优化。为了验证本课题算法的性能,将其与主流算法进行仿真对比实验。
3. 本课题还需要对全覆盖路径规划算法进行了设计和优化。首先,制定了全覆盖路径规划算法的整体流程。然后,设计了本课题算法的优化策略,其中包括对全覆盖路径进行整体优化的全局优化策略和遇到搬动障碍物能够做出实时调整的局部优化策略。最后,将本课题算法与 主流算法进行仿真对比实验。
4. ……
如上供参考,依据实际情况进行修改和完善。
工作计划或者时间安排:
尽量不要采用如上内容和格式,无法看出是某个课题的工作量,一看就知道课题细节一无所知,太笼统了。
参考如下:
| 起止日期 | 毕业设计(论文)工作进度(主要内容、完成要求) |
|---|---|
| 2021年12月21日—2021年12月31日 | 检索室内服务机器人相关资料,包括区域覆盖和仿真平台等,以支撑完成毕业设计的选题 |
| 2022年1月1日—2022年2月24日 | 对已经收集资料进行详细分析,重点确定区域覆盖算法和仿真平台的研究内容和方法,并完善开题报告 |
| 2022年2月25日—2022年2月28日 | 查阅资料,完成服务机器人相关外文翻译。Hasan K M, Abdullah-Al-Nahid, Reza K J. Path planning algorithm development for autonomous vacuum cleaner robots[C]. proceedings of the International Conference on Informatics. 2014. |
| 2022年3月1日—2022年4月4日 | 依据开题报告中关于服务机器人研究内容进行仿真平台开发调试和区域覆盖算法测试,同时完成设计中期检查表 |
| 2022年4月5日—2022年5月1日 | 完成算法测试和仿真平台调试,基本完成毕设论文初稿,并依据反馈意见进行修改 |
| 2022年5月2日—2022年5月8日 | 预留仿真平台优化的时间,并进一步优化论文 |
| 2022年5月9日—2022年5月15日 | 结合仿真数据和论文定稿,撰写演示文稿(PPT),展示课题成果,完成毕业设计全部工作 |
以上是关于机器人工程毕业设计☞开题报告的主要内容,如果未能解决你的问题,请参考以下文章