移植opencv3.4到Nanopi NEO 交叉编译
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了移植opencv3.4到Nanopi NEO 交叉编译相关的知识,希望对你有一定的参考价值。
参考技术A 前段时间移植opencv到nanopi成功了,当时没有记录一下,几个月之后项目需要发现已经忘的差不多了,果然好记性不如烂笔头:(,写的有点乱 记录一下吧略
移植python前先安装同样的版本到主机(很重要)
先解压 然后进入jpeg-8d解压后的文件夹内部
同样是先解压软件包
解压什么的往下就略过了
在opencv根目录创建toolchain.make
在文件中添加以下内容
在opencv根目录创建build文件夹 用来存放cmake的过程以及结果文件
进到build目录 并且配置cmake 选择自己需要的opencv模块
NanoPi NEO Air使用一:介绍
简介
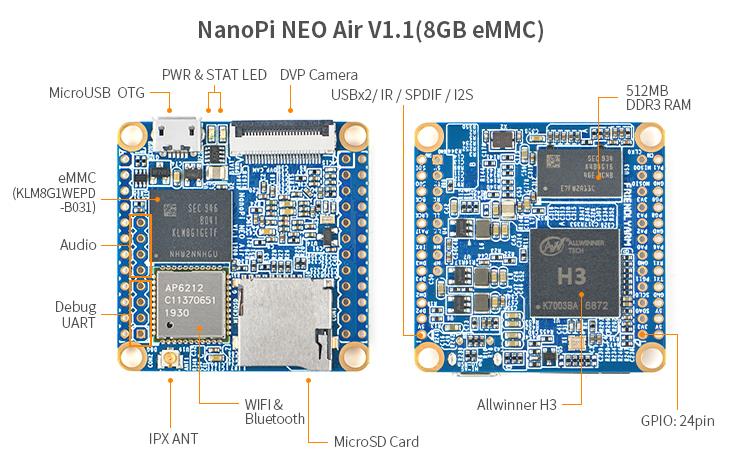
NanoPi NEO Air(以下简称Air)是一款大小只有 40x40mm的开源无线创客板,它采用全志公司的H3四核A7主控,最高运行主频可达1.2Ghz, 管脚兼容NanoPi NEO(有线网版本,V 1.2),并兼容24pin树莓派GPIO。 配备512M DDR3内存,标配 8GB eMMC高速闪存,集成AP6212 WiFi蓝牙模块,支持microSD卡启动运行系统,并带有YUV422并行摄像头接口,最高可支持500W像素CMOS摄像传感器。 采用了更加专业的电源系统设计,采用6层板布线,具有良好的散热特性。
资源特性
CPU: Allwinner H3, Quad-core Cortex-A7 Up to 1.2GHz
RAM: 512MB DDR3 RAM
Storage: 8GB eMMC
WiFi: 802.11b/g/n
Bluetooth: 4.0 dual mode
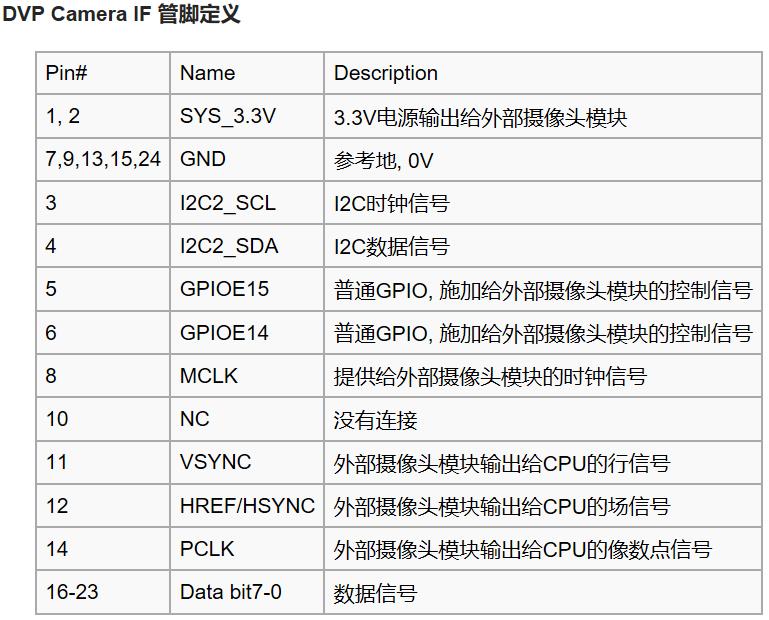
DVP Camera: 0.5mm pitch 24 pin FPC seat
MicroUSB: OTG and power input
MicroSD Slot x 1
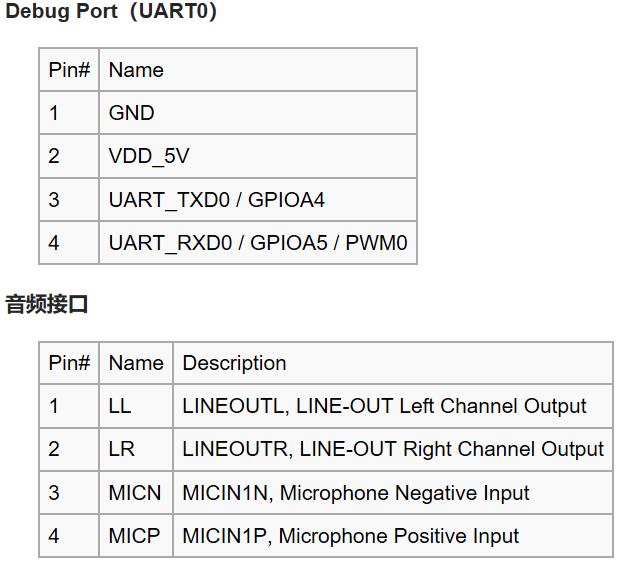
Debug Serial Port: 4Pin,2.54mm pitch pin header
GPIO1: 2.54mm spacing 24pin,It includes UART,SPI,I2C,GPIO
GPIO2: 2.54mm spacing 12pin,It includes USBx2,IR,SPDIF,I2S
PCB Size: 40 x 40mm
PCB layer: 6
Power Supply: DC 5V/2A
Temperature measuring range: -20℃ to 70℃
OS/Software: u-boot, Ubuntu-Core, eflasher
Weight: 7.5g(WITHOUT Pin-headers)
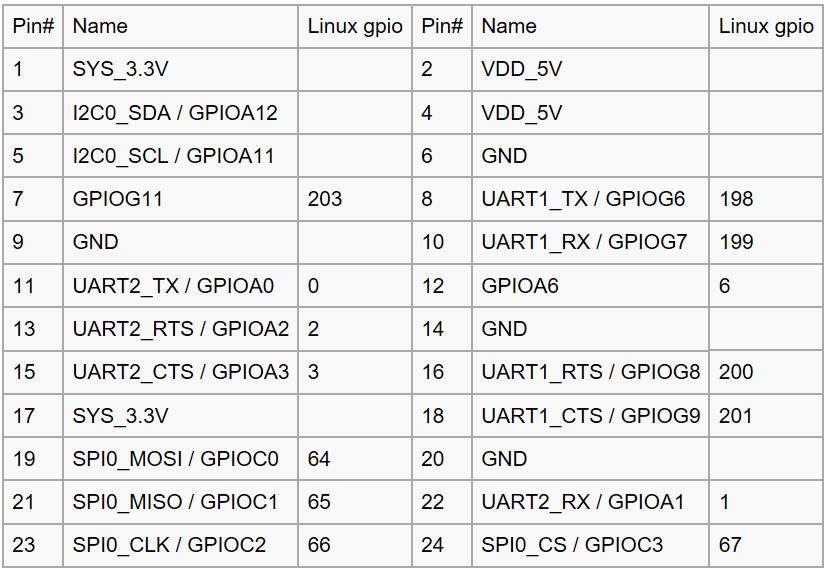
引脚
说明
- SYS_3.3V: 3.3V电源输出
- VDD_5V: 5V电源输入/输出。当电压大于MicroUSB时,向板子供电,否则板子从MicroUSB取电。输入范围:4.7~5.5V
- 全部信号引脚均为3.3V电平,输出电流为5mA,可以带动小负荷模块,io都不能带负载
- 更详细的信息请查看原理图:NanoPi-NEO-Air-1608-Schematic.pdf
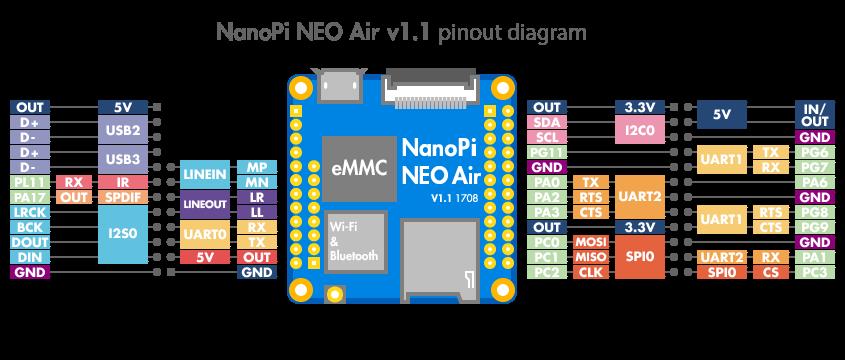
右边
左边
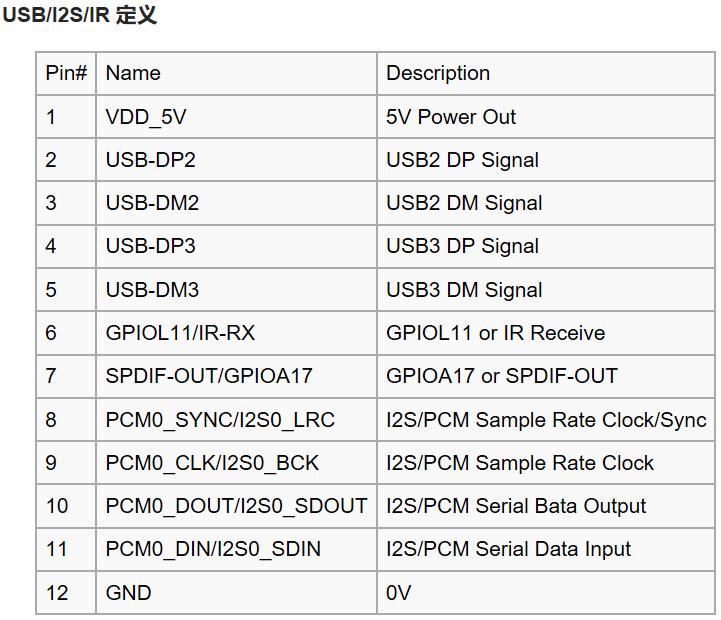
摄像头引脚
V1.0与V1.1
上面说的是V1.1版本的板子,NanoPi NEO Air还有个更老的V1.0版本的板子,他们有如下区别。

机械尺寸

以上是关于移植opencv3.4到Nanopi NEO 交叉编译的主要内容,如果未能解决你的问题,请参考以下文章
NanoPi NEO Air使用十三:移植RTL8723BU驱动
NanoPi NEO Air使用七:获取并编译U-boot和Linux的源码
OpenCV开发笔记(七十四):OpenCV3.4.1+ffmpeg3.4.8交叉编译移植到海思平台Hi35xx平台