基于51单片机密码锁-舵机开锁-CXM
Posted CHENxiaomingming
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于51单片机密码锁-舵机开锁-CXM相关的知识,希望对你有一定的参考价值。
这个项目的起因还是因为每次进出寝室十分的麻烦才有了这个项目
所以我和我的铁子就决定搞个密码锁
我负责软件我的铁子负责硬件
目录
先简单介绍一下整个架构
原理图
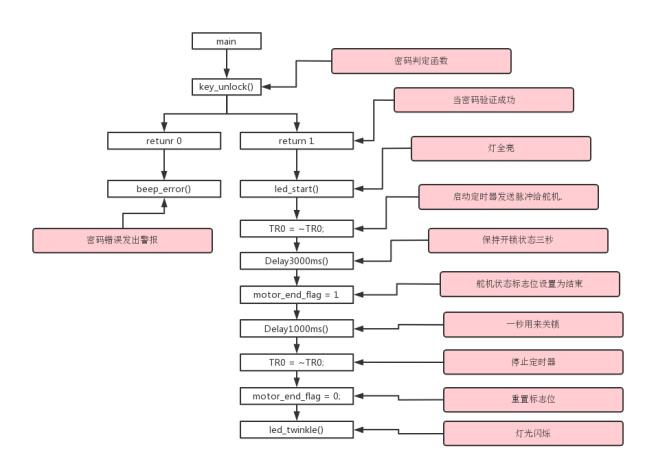
主要功能函数讲解
接下来看一下key_unlock()函数这个函数就是判断外部键盘输入的重点
unsigned int key_unlock()
u8 i=0;
u8 i1=0;
u8 i2=0;
u8 unlock=0;
for(i=1;i<5;i++) //必须扫描到4个按键否则不跳出
key_down(); //扫描按键
if(key_downflag == 1) //是否按下标志位
led_digit(i); //每次按下就用灯光显示
beep_key(); //按下音效
if(key_upflag == i) //再次验证是否松手 输入有效
key_unlock_code[i-1] = KeyValue+1;
if(key_unlock_code[i-1] == key_code[i-1]) //密码是否符合初始密码
unlock=unlock+1;
else i--; //如果没按下就无效这次循环
key_upflag = 0; //扫描4位完成将标识符重新清0
led_end(); //led状态重置
if(unlock == 4) //判断密码标志位是否正确
for(i2=0;i2<4;i2++) //密码正确密码清0
key_unlock_code[i2]=0;
return 1; //允许解锁
for(i2=0;i2<4;i2++) //重置
key_unlock_code[i2]=0;
return 0;
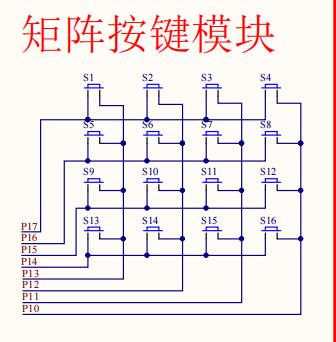
其中 key_down() 函数就是51单片机常见的矩阵案件的扫描程序
unsigned int key_down()
led_end(); //初始化灯
KeyValue = 0;
GPIO_KEY = 0x0f;
if(GPIO_KEY !=0x0f) //判断是否按下
Delay10ms(); //消影
Delay10ms();
if(GPIO_KEY !=0x0f) //确认是否按下
//判断列
key_downflag=1; //按下标志位
GPIO_KEY = 0x0f;
switch(GPIO_KEY)
case(0X07): KeyValue=0;break;
case(0X0b): KeyValue=1;break;
case(0X0d): KeyValue=2;break;
case(0X0e): KeyValue=3;break;
//判断列
GPIO_KEY=0Xf0;
switch(GPIO_KEY)
case(0X70): KeyValue=KeyValue;break;
case(0Xb0): KeyValue=KeyValue+4;break;
case(0Xd0): KeyValue=KeyValue+8;break;
case(0Xe0): KeyValue=KeyValue+12;break;
while(GPIO_KEY != 0xf0) //检测按键松手检测
;
key_upflag++;
return 1;
key_downflag = 0;
return 0;
现在重点是舵机驱动
舵机驱动的原理就是 PWM波,也就是用定时器来控制IO口进行20ms内的脉冲输出控制舵机转动角度
motor.c
/*
2021/9/6
@CHENxiaomingming
e-mail:2210138207@qq.com
*/
#include "stc15.h"
#include "indelay.h"
#include "inbeep.h"
#include "inkey.h"
#include "inmotor.h"
u16 PWM_start = 1500;
u16 PWM_end = 500;
void motor_start()
PWM_OUT = 1;
TH0=(65536-PWM_start)>>8; //250 fa
TL0=65536-PWM_start;
void motor_end()
PWM_OUT = 1;
TH0=(65536-PWM_end)>>8; //250 fa
TL0=65536-PWM_end;
重点在于定时器配置和中断函数
在中断函数里面 利用了switch 来控制高低电平时间 其中motor_start()函数里面就设置了开锁状态舵机角度需要的pwm波形的占空比,
/定时器/
void Init0_time()
TMOD|=0X01; //选择为定时器0模式,工作方式1,仅用TR0打开启动。
TH0=(65536-500)/256;
TL0=(65536-500)%256;
ET0=1; //打开定时器0中断允许
EA=1; //打开总中断
TR0=0; //打开定时器
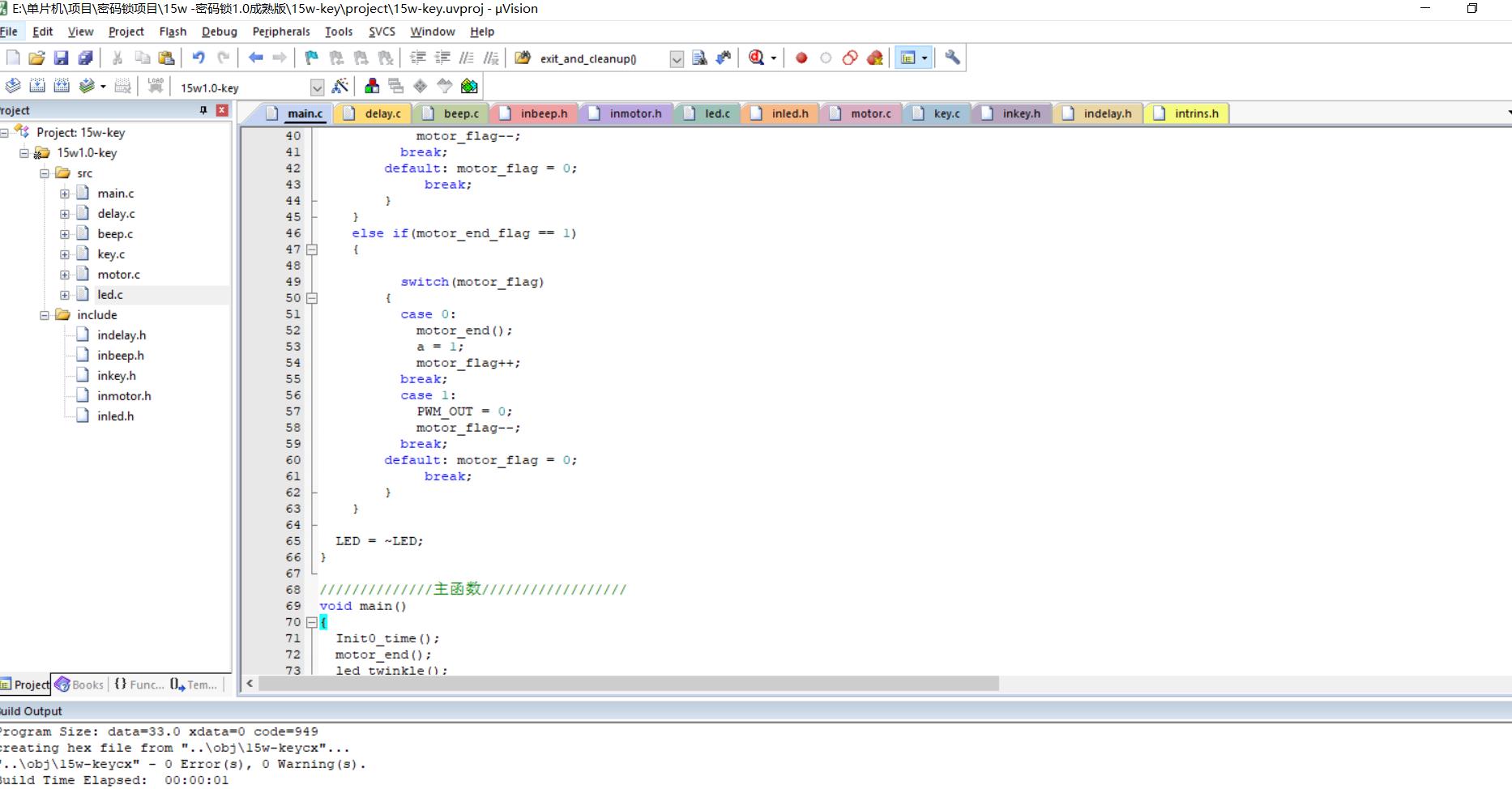
void Time0_Int() interrupt 1
if(motor_end_flag == 0) //判断当前舵机标识符状态 0为开锁状态
switch(motor_flag) //循环执行 这里需要理解pwm波原理
case 0: //高电平时间
motor_start(); //舵机启动函数 内设置了占空比时间
a = 1;
motor_flag++;
break;
case 1: //低电平时间
PWM_OUT = 0;
motor_flag--;
break;
default: motor_flag = 0;
break;
else if(motor_end_flag == 1)
switch(motor_flag)
case 0:
motor_end();
a = 1;
motor_flag++;
break;
case 1:
PWM_OUT = 0;
motor_flag--;
break;
default: motor_flag = 0;
break;
LED = ~LED;
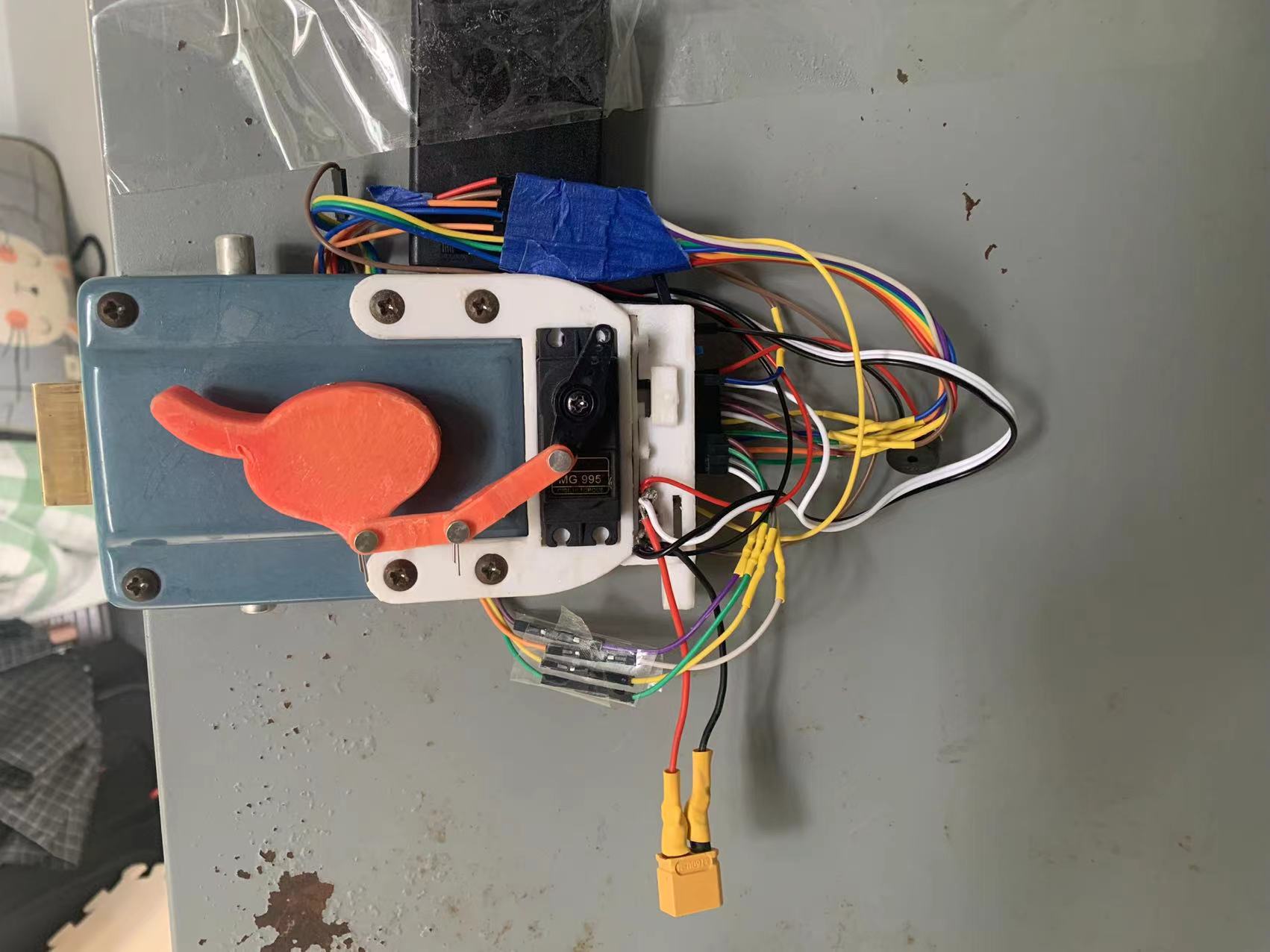
硬件
我们选择了最普通的stc15w芯片,优点是体积小便宜
然后就是散装发光二极管,和矩阵按键,以及180°舵机,无源蜂鸣器,其余部件均为3D打印
总成本差不多40RMB


效果和源代码

 https://download.csdn.net/download/chen_taifu/84529634
https://download.csdn.net/download/chen_taifu/84529634以上是关于基于51单片机密码锁-舵机开锁-CXM的主要内容,如果未能解决你的问题,请参考以下文章