机器人的一些主要概念
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机器人的一些主要概念相关的知识,希望对你有一定的参考价值。
1. 原点
原点一般是建立地图的起始点
2.充电桩位置
一般是把开机位置和充电桩放在一起
3.重定位
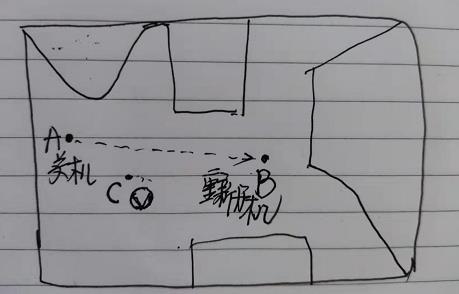
机器人在A点关机,手动推到B点开机,因为机器人在关机的情况下不知道被推多远,这时候机器人虽然实际在B点,但可能开机后显示在C点,这时候需要重定位,重定位有两种方式:
(1) 手动定位:建图工具中可通过把在C点的机器人拉到实际位置B点实现重定位,也可以手动推机器人到充电桩位置实现重定位
(2)自动定位:机器人可以通过扫描周边环境,判断自身处于这个已建好的地图上的位置,实现重定位
以上是关于机器人的一些主要概念的主要内容,如果未能解决你的问题,请参考以下文章