Franka Emika Panda连接真实机械臂
Posted 合工大机器人实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Franka Emika Panda连接真实机械臂相关的知识,希望对你有一定的参考价值。
Franka Emika Panda连接真实机械臂(二)
虚拟环境下已经可以进行机械臂的拖动了,下一步就是PC连接机械臂,并通过plan控制机械臂运动。
前文【Franka Emika Panda连接真实机械臂(一)】已经提到如何配置机械臂环境、如何在rviz仿真环境下拖动机械臂。下面记录的是最近一周学习panda机器人的一些心得,记录下来以便于以后“温故而知新”。
PC与机械臂相连的准备
1.机械臂底座有灯,灯的颜色表示不同模式。
蓝色:准备好了并准备移动
白色:停止(此时可以拖动示教)
黄色:错误(刚刚给机器人上电是底座灯显示黄色)
2.PC与机械臂通过网线相连,此时应该注意的是,网线一端连PC,一端连接机械臂控制柜(而不是机械臂底座)。
3.PC端已经设置好静态ip,打开浏览器输入网址172.16.0.2,可以看到以下界面。
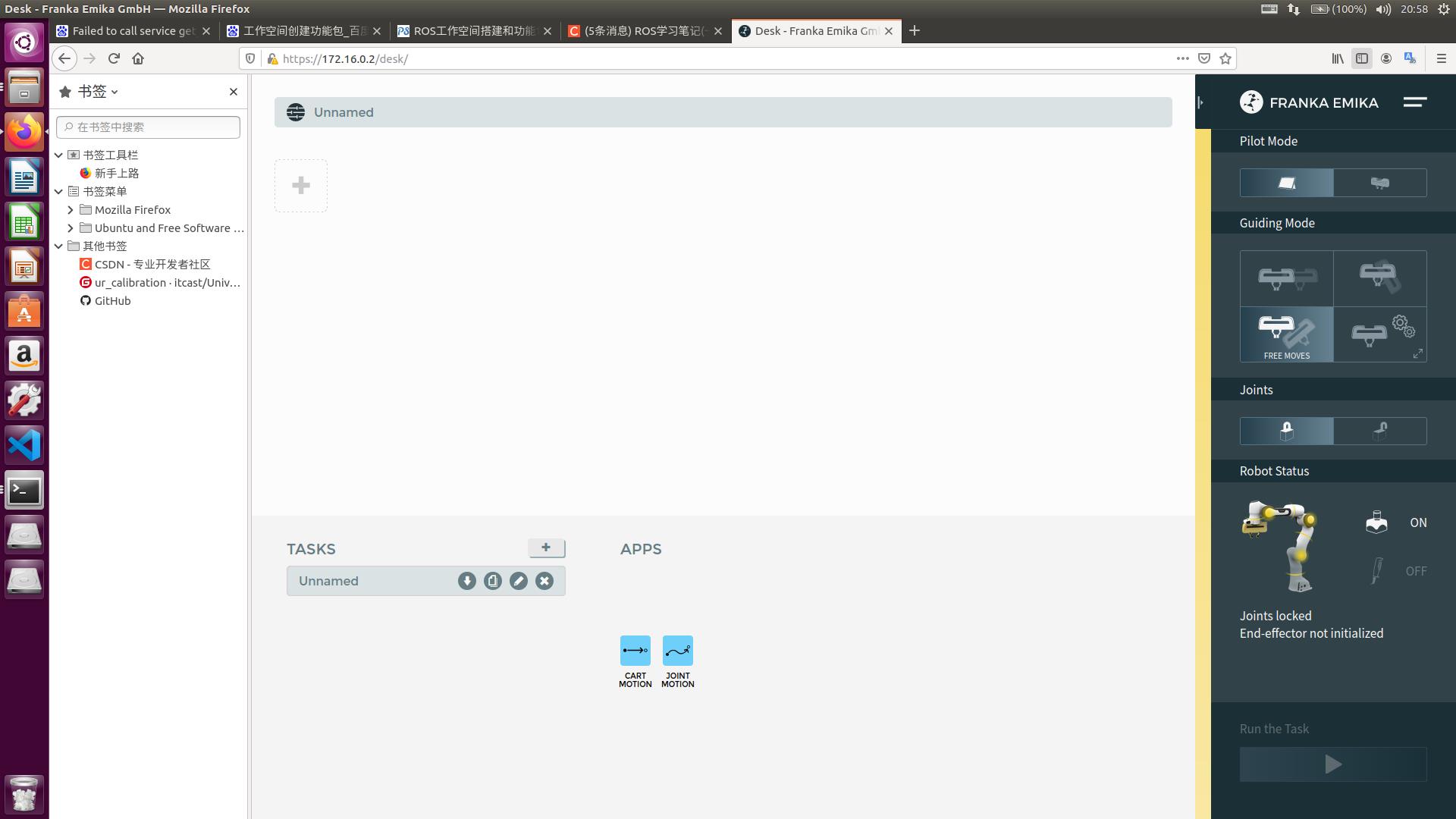 打开Joints下面的关节锁,franka底座灯变蓝。手持外部激活设备,开始franka panda的探索啦!
打开Joints下面的关节锁,franka底座灯变蓝。手持外部激活设备,开始franka panda的探索啦!
demo.launch控制franka机械臂的探索
首先,现在panda_moveit_config 的launch文件夹里创建一个demo_real.launch的文件,先把demo.launch文件的全部内容复制到demo_real.launch。我们就通过修改这个文件来尝试控制机械臂。
打开demo_real.launch文件,我们可以看到:
<include file="$(find panda_moveit_config)/launch/move_group.launch">
<arg name="planner" value="$(arg planner)" />
<arg name="allow_trajectory_execution" value="true"/>
<arg name="fake_execution" value="true"/>
<arg name="info" value="true"/>
<arg name="debug" value="$(arg debug)"/>
</include>
此时fake_execution的value="true",我们了解到此时进行的虚拟执行,也就是仿真,所以先把true改成false。
尝试运行了:
roslaunch panda_moveit_config demo_real.launch robot_ip:=172.16.0.2
结果显示:
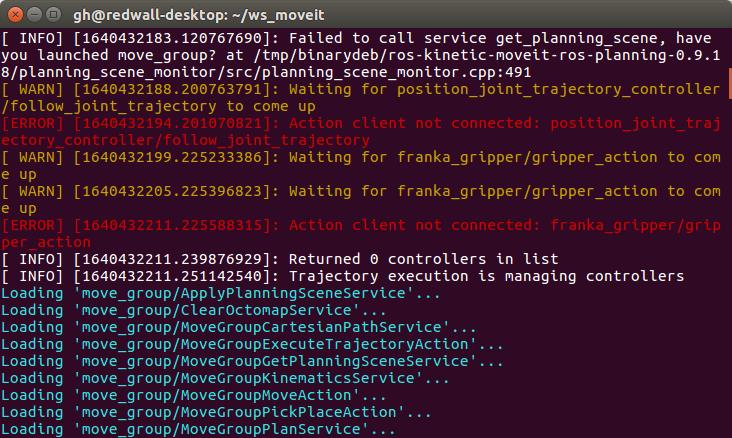
Action client not connected。 这个问题困扰了我很久,也阅读了很多博客。比如:
【使用moveit!控制真实机械臂(3)——修改moveit配置文件来控制真实机械臂(9月27日更新)】
这里面提到了怎么修改moveit生成的功能包来控制真实机器人。所以我开始查看是否需要修改yaml文件等。上文所git 的功能包里包括了panda_controller.yaml等文件。
打开move_group.launch,
<include ns="move_group" file="$(find panda_moveit_config)/launch/trajectory_execution.launch.xml" if="$(arg allow_trajectory_execution)">
<arg name="moveit_manage_controllers" value="true" />
<arg name="moveit_controller_manager" value="panda" if="$(eval not arg('fake_execution') and not arg('load_gripper'))"/>
<arg name="moveit_controller_manager" value="panda_gripper" if="$(eval not arg('fake_execution') and arg('load_gripper'))"/>
<arg name="moveit_controller_manager" value="fake" if="$(arg fake_execution)"/>
</include>
从这一段可以看出,fake_execution值为false时,moveit_controller_manager的值为panda,即真实机器人,没有错误。
那为什么控制还是不行呢?
【通过ROS控制真实机械臂(5)—Moveit!真实机械臂(move_group和demo.launch修改)】
原来是moveit作为client端,并没有接收到server端的两个节点的消息导致的。
打开panda_controllers.yaml,
controller_list:
- name: position_joint_trajectory_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- panda_joint1
- panda_joint2
- panda_joint3
- panda_joint4
- panda_joint5
- panda_joint6
- panda_joint7
name:这里你可以写一个与你机器人相关的名称,方便你使用
action_ns:follow_joint_trajectory ,follow_joint_trajectory 是后续action的名称的一部分,你需要填一个action的名称,这个名称就在这个配置文件里确定了,就是name/action_ns所代表的对应字符串的组合。
type: FollowJointTrajectory ,这个类型是ros下的自带action类型,是一种控制机械臂运动轨迹的数据结构,请原样填写,将来你可能还想控制手抓之类的结构,所填写的类型都是不一样的。
joints:这里是你机器人(机械臂)的关节名称,这些名称源自你的机器人模型文件,我们的controllers.yaml文件复制于fake_controllers.yaml文件,这部分应该是自动生成的。
原文链接:https://blog.csdn.net/nmssg1/article/details/100665543
这里大家可以看这篇博客,对于action讲解的比较清楚:
【机器人学习必看系列:如何使用moveit控制真实机械臂?】
简单来说,通信就像接插头,moveit就像插头,已经准备好了,但是插板(action server)一直不在,这样当然不能通电了。
问题是想明白了,但是接下来该怎么解决呢?这又让人犯难了。
一些博主提出,可以自己编写一个节点文件,在运行launch文件之前,先运行这个节点,使position_joint_trajectory_controller处于畅通状态。但是本人也是刚刚接触机器人,franka又是七自由度机器人,花了几天时间也没有写出有用的节点文件。
这里先把之前找到的有用文件统计下来,以备后续学习。
【ROS中Moveit生成轨迹如何作用于实际的机械臂(一)】
【ROS中Moveit生成的轨迹如何作用与实际的机械臂(二)】
【ROS中Moveit生成的轨迹如何作用于实际的机器人(三)】
【使用moveit!控制真实机械臂(5)——编写真实机械臂节点中的action服务程序】
【Moveit实际的机械臂控制(5)moveit,编写action server节点和Arudion端的节点】
【ROS学习笔记16 —— 控制真实机械臂的action(实例大集合)】
【通过ROS控制真实机械臂(5)—Moveit!真实机械臂(move_group和demo.launch修改)】
【使用moveit!控制真实机械臂(4)——了解moveit!所使用的action】
这条路暂时是被封死了,找遍网络也没有几个使用ROS控制franka panda机械臂的教程,挠头皮(发际线后移buff)。
控制机械臂
1.测试机械臂联通情况
ifconfig
查看ip是否已经修改。
uname -r
查看linux内核是否为实时内核。
ping 172.16.0.2
查看PC是否能与机械臂通信。
cd ~/catkin_franka/libfranka/build/examples
./echo_robot_state 172.16.0.2
./communication_test 172.16.0.2
如果此通信测试未通过,则表示通信网络不足以控制机器人。
2.机械臂实时控制
roslaunch franka_example_controllers cartesian_impedance_example_controller.launch robot_ip:=172.16.0.2 load_gripper:=true
此时拖动rviz中的机械臂,真实机械臂会实时运动,所以一定要确保周边并无障碍物。
cd ~/catkin_franka/libfranka/build/examples
./communication_test 172.16.0.2
使用此命令,使机械臂恢复初始位置。
3.机械臂的plan与execution
roslaunch franka_control franka_control.launch robot_ip:=172.16.0.2
roslaunch panda_moveit_config panda_moveit.launch
roslaunch panda_moveit_config demo_real.launch
想了很久才想到这个方法,虽然感觉属于旁门左道了,但是经实测,确实可以实现机械臂的plan与execution。
以上是关于Franka Emika Panda连接真实机械臂的主要内容,如果未能解决你的问题,请参考以下文章