轻松抓鸡蛋剪纸夹芯片,这只“机械爪”堪比人手!
Posted AI科技大本营
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了轻松抓鸡蛋剪纸夹芯片,这只“机械爪”堪比人手!相关的知识,希望对你有一定的参考价值。

作者 | 学术头条
来源 | 学术头条
如果机器手能执行与人手一样的功能,那在执行任务时就可拥有高度的灵活性。
然而,在保持人手般灵巧度和抓握力等重要功能的同时,开发无需额外驱动部件的集成机器手是一项挑战。因为驱动部件使得这些机器手很难集成到现有的机械臂中,从而限制了它们的广泛适用性。
现在,新的解决方案来了,来自韩国的科研团队基于连杆驱动机构,开发了一种集成连杆驱动的灵巧拟人机器手,称为 ILDA,这只机器手有15个自由度(20个关节)、34N的指尖力、紧凑的尺寸(最大长度:218 mm),无需额外部件,拥有1.1 kg的低重量和触觉感应能力。
值得关注的一点是,这种机器手可以直接安装到现有商业机械臂上,执行各种各样的任务——从抓握鸡蛋到使用剪刀和镊子,相关论文发表在《自然-通讯》(Nature Communications)上。
图|ILDA 机器手手指的灵活性展示(来源:Nature Communications)

机械手方案取长补短
为了实现有效的抓取运动,业内其实已经开发出了很多相对灵巧的拟人机器手,他们能够自适应抓取一些物品。而在这篇论文中,研究人员们则侧重于分析研发具有高灵巧度的多自由度手,灵巧机器手的代表性核心元素分为以下几个方面:电机直接驱动、肌腱驱动以及连杆驱动机构。
基于电机直接驱动机构开发的手是一种常见结构,可以直观地相对于关节定位电机,直接或使用齿轮或正时皮带轮驱动关节。这种结构可以具有高的接头驱动效率,并且容易将接头布置在所需位置。
 图|约翰·霍普金斯 APL 实验室开发的 MPL 机械手臂(来源:Johns Hopkins University)
图|约翰·霍普金斯 APL 实验室开发的 MPL 机械手臂(来源:Johns Hopkins University)
从具体案例来讲,由约翰·霍普金斯 APL 实验室开发的 MPL v2.0 机器手就显示出了高灵巧度,具有 22 个自由度的主动式,并且设计紧凑,集成了执行器和电子设备,能够进行人类水平的自然运动和触觉反馈。然而,手的大小和性能高度依赖于电机,尤其是手指部分,使用高端规格的电机或驱动力传输部件会增加成本,此外,由于电机的重量,手指处的惯性很高,因此需要复杂的控制机构,如果没有致动器技术的创新,很难实现紧凑、轻便和高性能。
 图|Shadow Robot 机器手(来源:Shadow Robot)
图|Shadow Robot 机器手(来源:Shadow Robot)
基于肌腱驱动机构的手与人手驱动机构最为相似。通常,它们的执行器位于前臂上,通过肌腱连接到关节以传递驱动力,NASA 开发的机器人手、DLR 开发的 David 手和 Shadow Robot 公司开发的 Shadow 灵巧手可被视为具有这种机构的代表,这是一种非常适合开发单个仿人机器人的方法,但这类机器手的致动器和电气部件相当大,很难将这些机器手与许多现有的商用机器臂相结合。
连杆驱动机构是我们日常生活中常用的机构。基于这一机制开发的手通过一个结构促进关节在所需方向上的运动,该结构可将多个连杆组合在一起,从致动器传递动力,这类机器手具有接头的双向控制、鲁棒性以及易于制造和维护等优点。然而,它们很难实现多自由度运动并保持较大的工作空间,特别是在串联机器手(如手指)中。肌腱薄而灵活,因此可以通过旋转轴独立驱动每个关节,但连杆相对较厚且较硬,使得这种配置难以实现。
通过对现有机器手方案的分析,研究人员们得出结论,机器人手必须具备以下优势:灵活性、指尖力、可控性、鲁棒性、低成本、低维护和紧凑性。此外,所有部件应该都能嵌入到手本身中,并包括上述所有功能,由此开发一种集成连杆驱动的灵巧拟人机器手(ILDA)。
 图|ILDA 概述,配置包括五个带指尖传感器的机器人手指、集成执行器的手掌侧以及控制器和附件等(来源:Nature Communications)
图|ILDA 概述,配置包括五个带指尖传感器的机器人手指、集成执行器的手掌侧以及控制器和附件等(来源:Nature Communications)
新的方案通过并联和串联机构的融合构建,通过连杆组合实现掌指关节(MCP)的 2 自由度运动和近端指间关节(PIP)的 1 自由度运动,可发挥每个关节作用的小零件的选择、零件放置和配置,以实现所需的自由度运动和驱动角度,以及高效的动力传输结构,以获得高指尖力及其后驱动能力。通过将六轴力/扭矩(F/T)传感器连接到指尖,可确保手的力感应能力。利用所设计的手指,研究人员开发出一种具有 15 个自由度和 20 个关节的五指机器手。
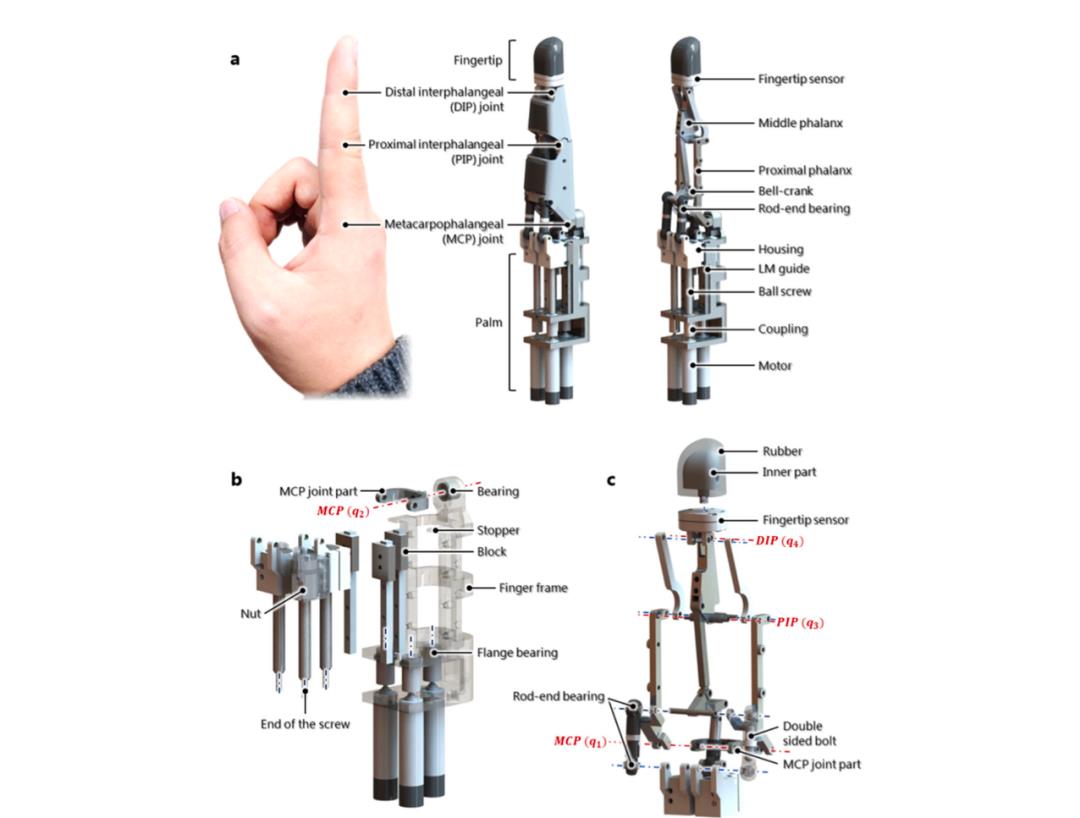 图|机器人手指的结构(来源:Nature Communications)
图|机器人手指的结构(来源:Nature Communications)
在实际应用中,它是通过解决电路板布局和布线问题来构建的,确保了电子设备的紧凑性。所有电机都集成在手掌中,有五个手指和指尖传感器,可以通过简单的连接配置轻松地连接到一般机器人手臂上。
在实验中,这个全新的机器手能抓取各种形状物体的可能性,提供强大的抓取力,并确保抓取时的精细度。最后,通过使用剪刀剪纸和用镊子拾取小物件的试验,验证了手的高利用率,复制了日常生活中人手执行的工具操作。

图|ILDA 机器手灵活抓握能力(来源:Nature Communications)

性能再上新台阶
研究人员对 ILDA 机器手性能进行了一些分析。在连杆驱动机构方面,设计的关键在于实现一个连杆驱动的机器人手指机构,该机构具有类似人类手指的 3 自由度运动,具有窄手指大小的工作空间,以确保机器人手的灵巧性。
大多数连杆驱动的机器人手指只实现了两个关节从属的 1 或 2 自由度运动,通过三个棱柱关节处的线性位移,研究人员开发了手指3自由度运动的组合,通过旋转电机和滚珠丝杠的组合产生三个线性位移,三个电机可以同时产生三自由度运动并产生高力输出。
 图|机器手指机构的运动学结构(来源:Nature Communications)
图|机器手指机构的运动学结构(来源:Nature Communications)
为实现所设定的目标需求,研究人员主要考虑以下因素:(1)选择和配置合适尺寸的零件以实现所需的自由度运动:在手指形状的狭窄空间中实现上述运动学模型的功能,应在模型的配置中适当安排。因此,从设计角度选择合适尺寸的小部件非常重要。(2) 高效的动力传输结构,最大限度地减少装配零件之间的摩擦。为了获得较高的指尖力,需要一个紧凑的结构,同时最小化动力传输部分的摩擦力。(3) 易于制造和组装。为了提高已开发机械手的市场渗透率,从成本和维护方面对其进行评估也很重要。因此,设计一种简单、鲁棒的机械手结构是非常重要的。
 图|机器手的详细尺寸(来源:Nature Communications)
图|机器手的详细尺寸(来源:Nature Communications)
最后,所有动力传输部件和电机都集成到手的手掌侧,五个 F/T 传感器安装在配置的手指部件的每个指尖上,传感器接线已完成,因此不会干扰手指的移动,最终,开发出了这种最大长度为 218 mm、重量仅为 1.1 kg 的集成机器手。
为了验证 ILDA 手的性能,研究人员从三个维度进行了评估:(1)工作空间内的灵巧度;(2)指尖力;(3)触觉感知能力。
在实验中,MCP 接头可从 0° 驱动至 90°,PIP 接头也可从 0° 操作至 90°;此外,PIP 接头可以独立于 MCP 接头运行,手指外展和内收的角度为 ±35°。
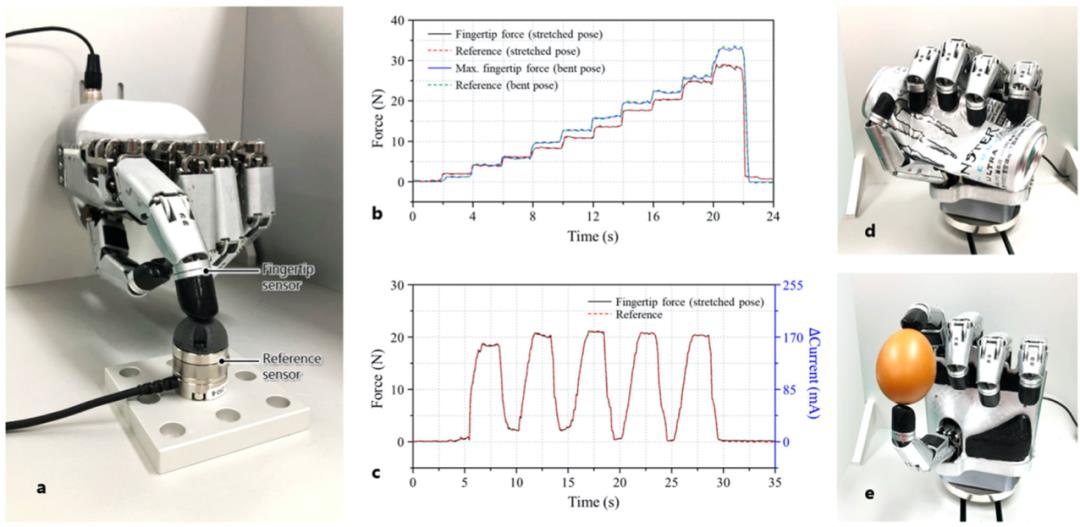 图|性能分析(来源:Nature Communications)
图|性能分析(来源:Nature Communications)
通过指尖传感器确定接触点处接触力的大小,并将相同的力施加到指尖和参考传感器上,手指施加的力依次递增,而 25 mA 电流每 2 秒递增一次,这个手指施加的最大力在伸展姿势为 28 N,弯曲姿势为 34 N,验证了手指施加的静态力的准确性,平均误差为 0.9 N。响应通常匹配良好,无临界误差,在执行精细任务时具有实现力控制的巨大潜力。

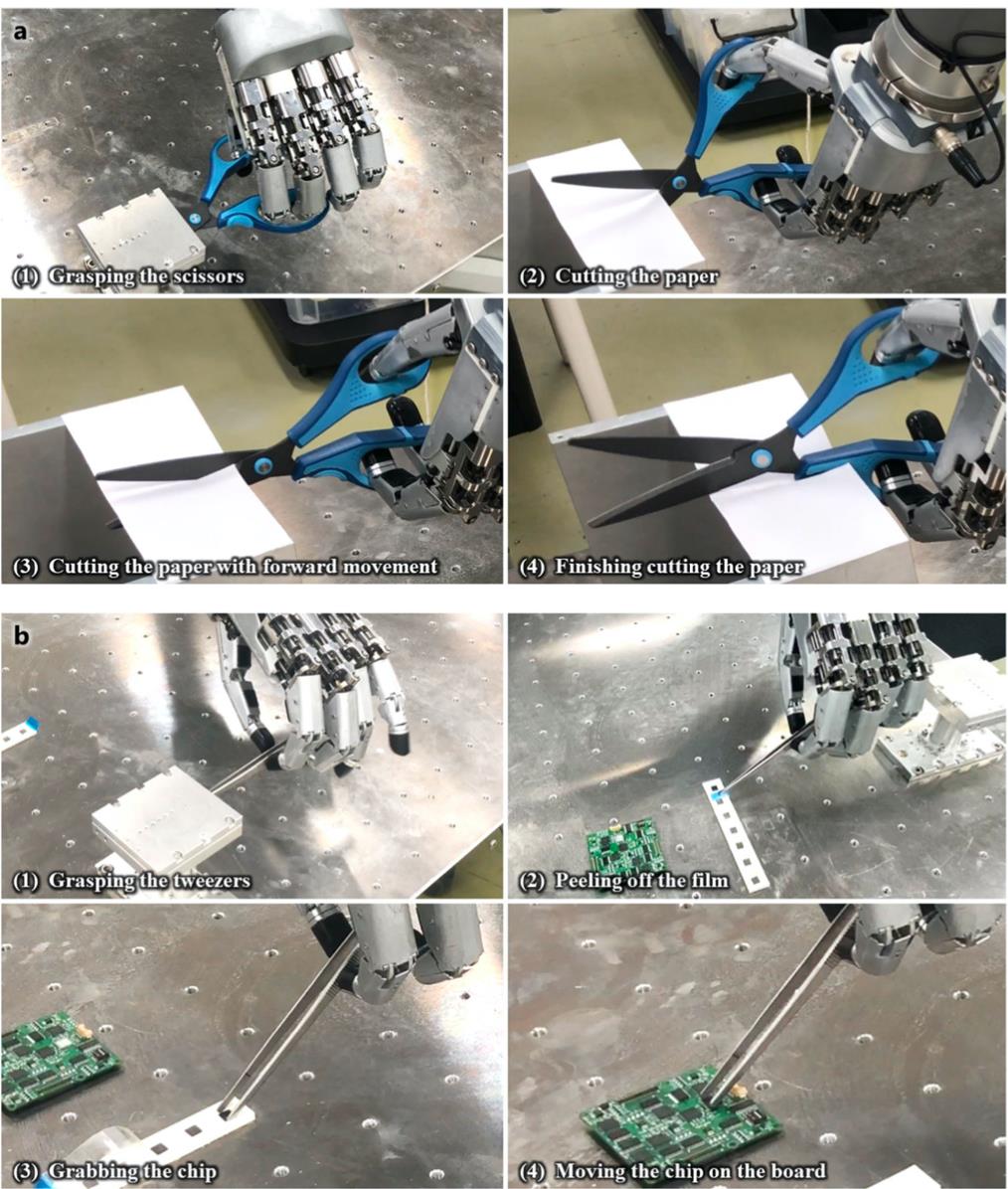
图|机器手进行各种抓握测试和精细化操作(来源:Nature Communications)
在测试环节,开发的手被用来捏扁铝易拉罐,当时在每个手指上测得的最大力为 25 N;也可以用这只手安全地抓住鸡蛋,不会捏碎;为了确认使用该机器手操纵工具的可能性,将手与商业机械手相连进行了剪纸实验,因为在日常生活中使用剪刀进行剪纸是一项需要高度灵巧的任务。
最后一项测试涉及用镊子夹住和移动小物体,操纵器移动,使镊子的尖端能够握住小芯片,手执行抓取动作,使镊子剥开芯片的盖子并抓取芯片,接下来,将物体移动到另一个位置,松开镊子以完成操作,一切都顺利完成。
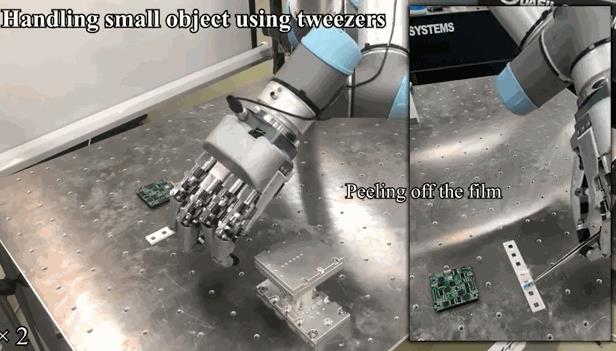
图|机器手用镊子夹起芯片(来源:Nature Communications)

降低商业应用门槛
研究人员表示,基于连杆驱动机构的灵巧拟人机械手 ILDA 确保了连杆驱动机构的原始优势,如关节的双向控制、鲁棒性以及易于制造和维护等,同时,它确保了具有 20 个关节的 15 自由度主动移动,手指之间有足够的工作空间,以及较高的指尖力,它的重量也更小,尺寸紧凑,并为传感器集成提供了空间。
ILDA 机器手可以很容易地连接到现有的商业机械臂或正在开发的机械臂上,而不需要额外的部件,关键优势在于手部表现出高性能,并且零件配置与手部本身相结合。
这款机器手可以根据不同物体的形状执行不同类型的抓取。剪刀和镊子用于确定在日常生活中操作工具的可能性,虽然很难准确量化手在使用剪刀操作工具时的有效性,但他们使用手的多个自由度并通过关节的双向控制来执行组合运动。
具有超高自由度的灵巧拟人机器手的开发仍然是一个悬而未决的问题,需要从科学和工程的角度持续进行研究。但在这项研究中,研究人员试图最大限度地提高机器手在各个维度的性能。
到目前为止,业界已经开发出了许多相对灵巧的机器人手,但由于复杂的制造过程和维护困难导致的高成本限制了它们的商业化落地使用,而这款ILDA机器手的适用性,将通过功能和成本的综合优化,能够扩展到实际研究领域和许多行业应用,推进机器手的进一步研究。
这么灵活的机器手,将来能不能用到人身上,帮助残疾人完成一些日常操作呢?可以拭目以待了。
参考资料:
https://www.nature.com/articles/s41467-021-27261-0


往
期
回
顾
资讯
技术
资讯
技术

分享

点收藏

点点赞

点在看
以上是关于轻松抓鸡蛋剪纸夹芯片,这只“机械爪”堪比人手!的主要内容,如果未能解决你的问题,请参考以下文章
将29个鸡蛋放入八个篮子里 每个篮子里数量鸡蛋 鸡蛋数量是奇数能做到吗 为什?