自动驾驶 8-3: 递归最小二乘法Recursive Least Squares
Posted AI架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶 8-3: 递归最小二乘法Recursive Least Squares相关的知识,希望对你有一定的参考价值。

在本课中,我们将 讨论递归最小二乘法, 一种计算技术 动态最小二乘法。
在课程结束时, 你将能够扩展 批量最小二乘解 我们在前两个视频中讨论过 到一个递归工作。
使用这种方法 递归最小二乘法 保持运行估计 最小二乘解 作为新的测量 流入。让我们开始吧。
我们已经研究过这个问题 计算一个值 一些未知但恒定的参数 从一组测量。
我们的假设之一是我们有 手头的所有数据。
也就是说,我们假设 我们收集了一批 测量值,我们想使用 那些要计算的测量值 我们估计的感兴趣数量。
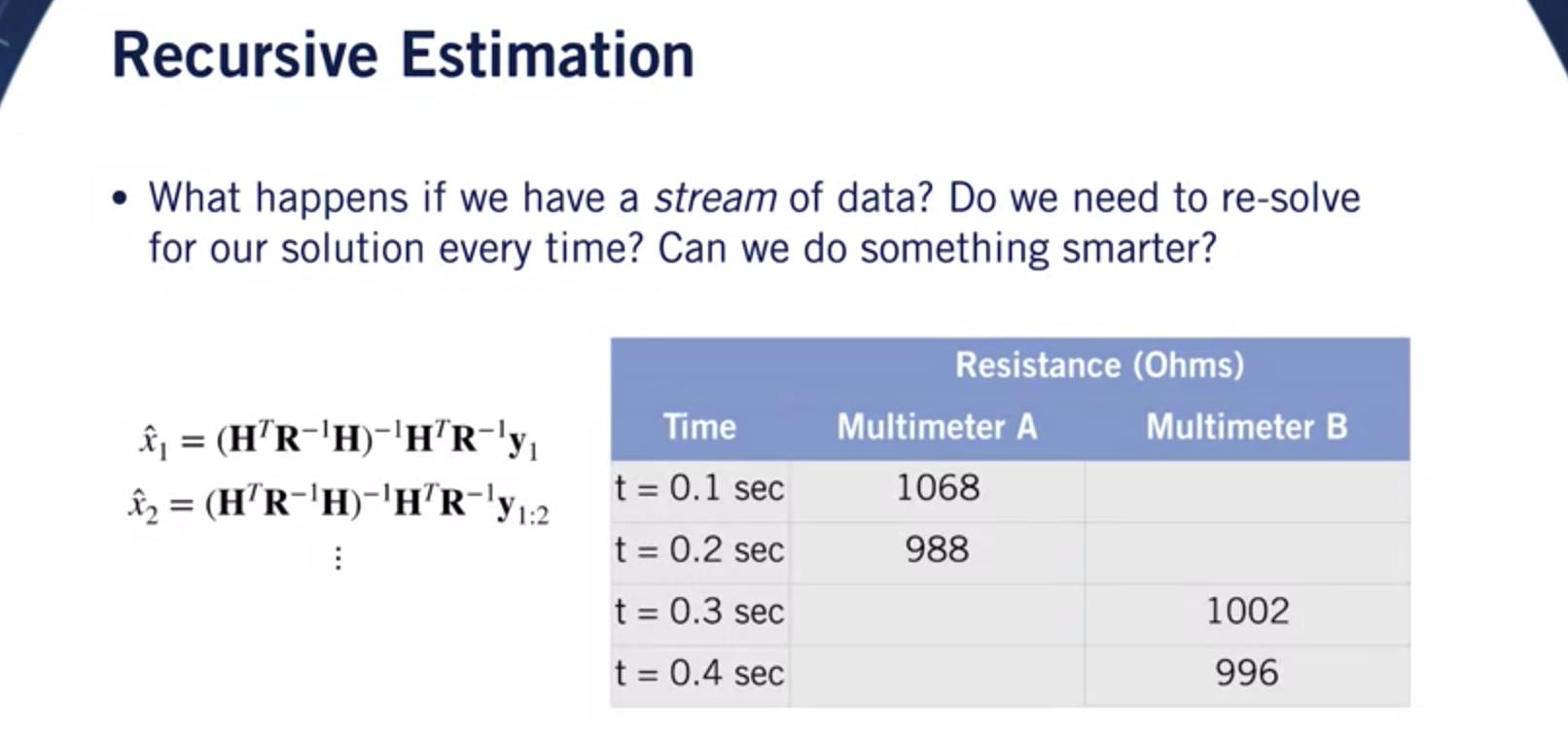
这是有时 一个完全合理的假设。 如果相反,我们能做什么 我们有数据流?
是否需要重新计算 最小二乘解 每次我们收到一个新的测量值?
例如,假设我们有一个 万用表可以 每秒测量电阻 10 次。
理想情况下,我们希望 使用尽可能多的测量 可能得到 电阻的准确估计。
如果我们使用该方法 然而,最小二乘法, 计算资源量 我们需要解决 我们的正规方程将 随着测量向量的大小而增长。
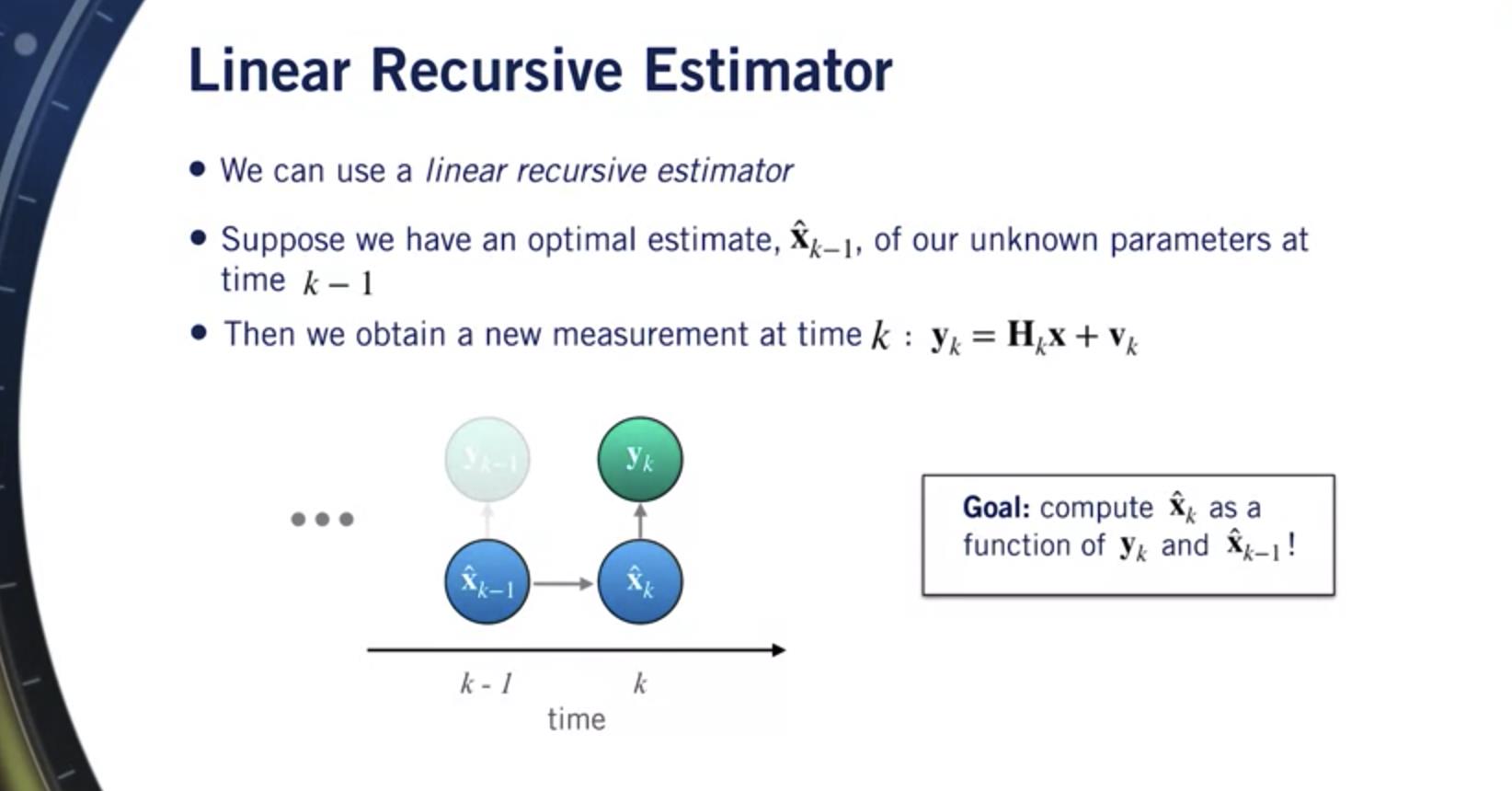
或者,我们可以尝试使用 递归方法一 保持运行估计 最优参数的 对于所有测量 我们已经收集了上一个 时间步长然后 估计给定的更新 当前时间步长的测量值。
为此,我们使用递归算法, 逐步更新 我们的估计随着我们的进行。
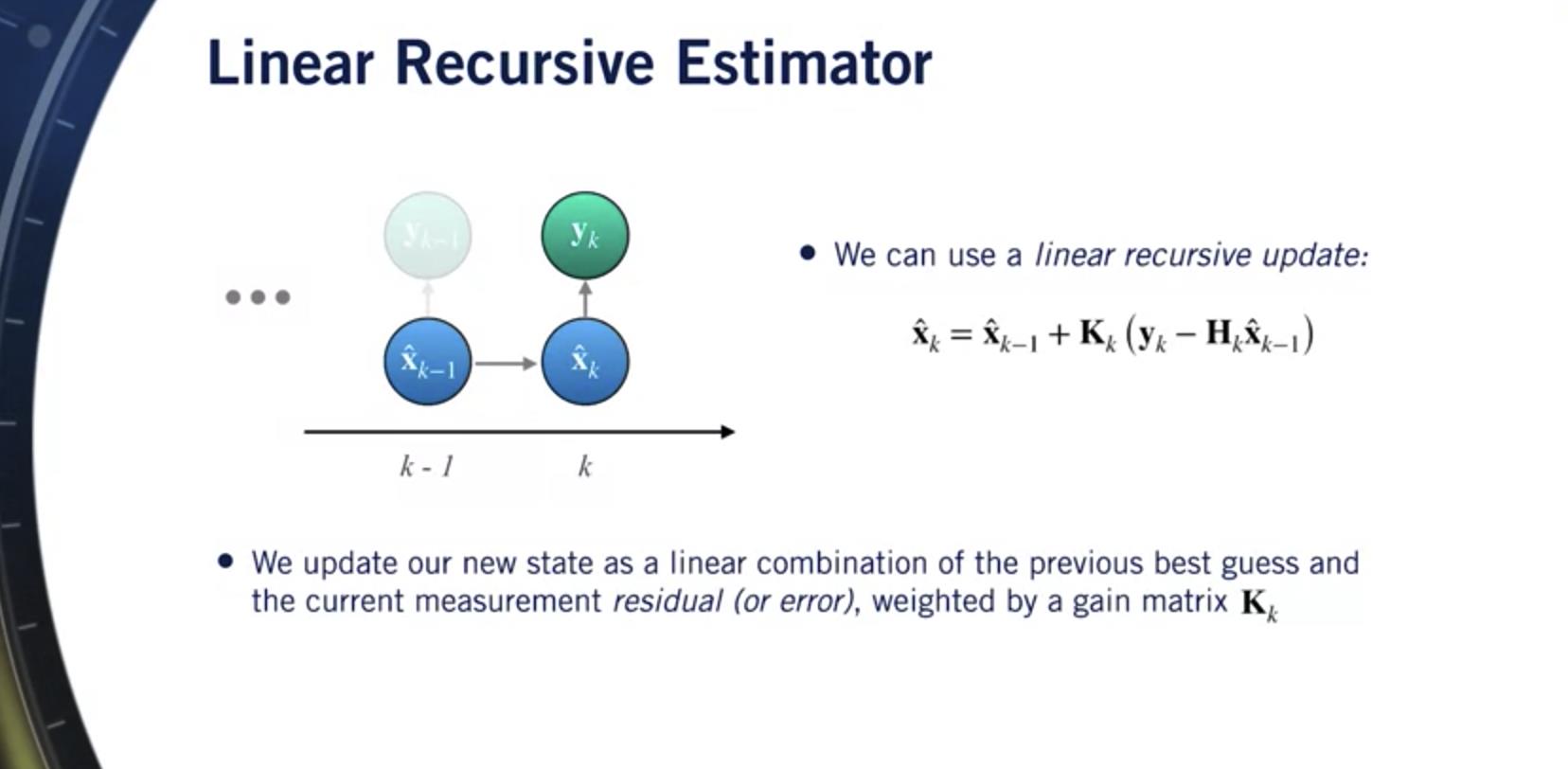
让我们假设我们有 我们最好的最优估计 在 k 减 1 时。
在时间 k 我们收到 一种新的测量方法 假设遵循线性测量模型 加性高斯噪声。
我们的目标是计算 在时间 k 更新的最优估计, 鉴于我们的测量和 之前的估计。
线性递归估计是 由以下表达式给出。
这里 k 称为估计器增益矩阵。
括号中的术语 叫做创新。 它量化了有多好 我们当前的测量匹配 我们之前的最佳估计。
即使不知道表达 叉。我们可以已经看到这是怎么回事 递归结构有效。
我们的新估计很简单 旧估计的总和和 修正项基于 我们之间的区别 预计测量 是和我们实际测量的。
事实上,如果创新 等于零, 我们不会改变 我们的旧估计。
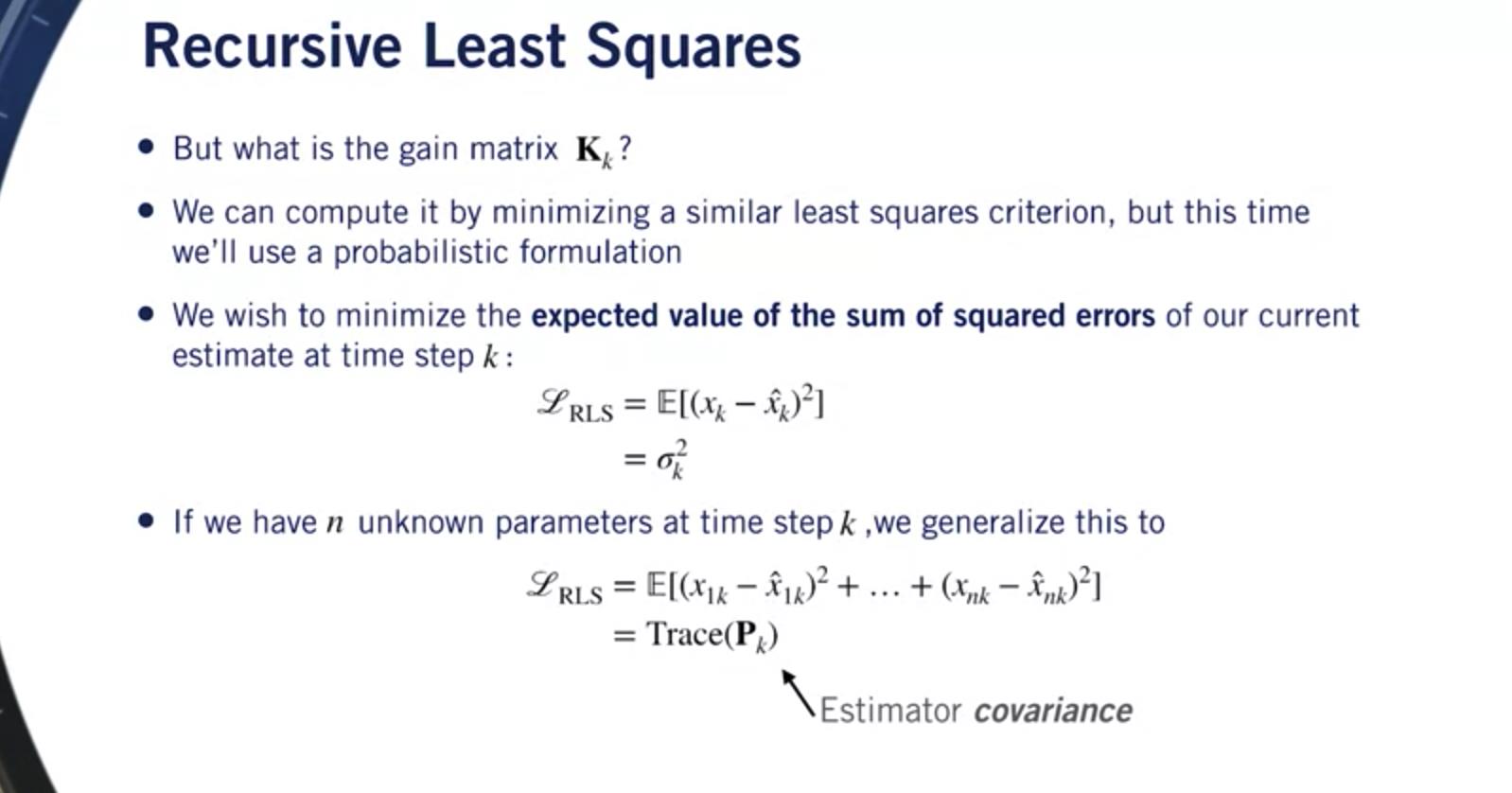
现在,我们如何计算 k? 那么,为此,我们需要使用 递归最小二乘准则 和一些矩阵演算和以前一样。
这次的数学是 明显更多地参与,所以, 只需通过几个步骤,让 越好奇的学习者参考 到教科书了解更多信息。
我们的最小二乘准则和 这种情况将是 r 的期望值 我们当时估计的平方误差 克。
对于单个标量参数比如抵抗, 这相当于最小化 估计器状态方差, sigma 平方 sub k。
对于多个未知参数, 这相当于最小化跟踪 我们的状态协方差矩阵在时间 吨。
这就像我们以前的最小二乘准则 除了现在我们有 谈论期望。
而不是直接最小化误差, 我们最小化它的期望值 这实际上是估计量方差。
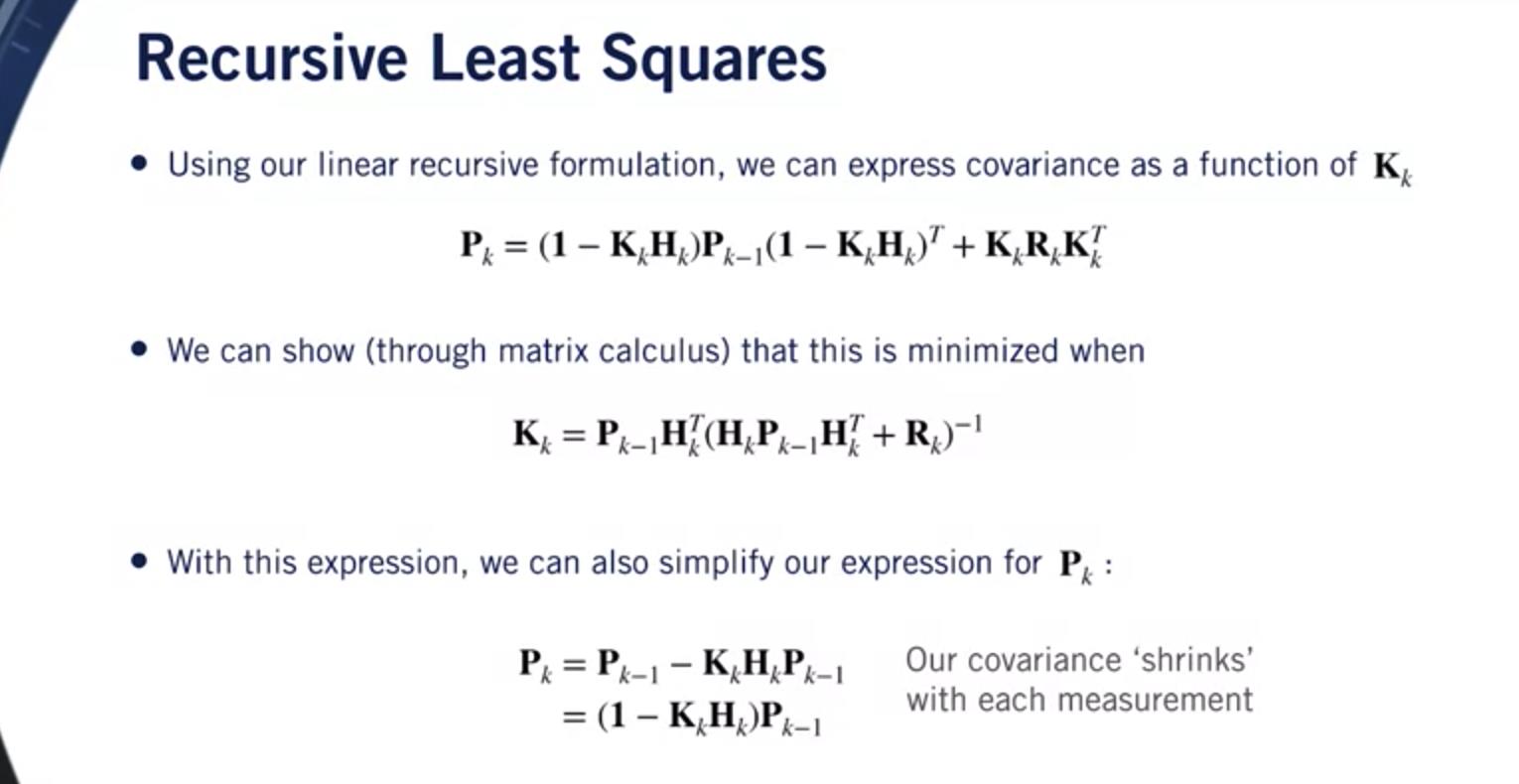
方差越低, 我们越确定我们的估计。 事实证明,我们可以制定 递归定义 这个状态协方差矩阵 P_k。
通过使用矩阵演算 并采取衍生品, 我们可以证明这个标准是 当 k 具有以下值时最小化。
完整的推导是 有点超出范围 我们的课程,但可以找到 在任何标准估计文本中。
最后,通过使用这个公式, 我们也可以重写 我们的递归定义 将 P_k 转换成更简单的东西。
花点时间思考一下这个等式。 我们的增益矩阵 k 越大, 我们的新估算器越小 协方差将是。
直觉上,你可以想到 这个增益矩阵为 平衡信息 我们从我们先前的估计中得到 以及我们收到的信息 从我们的新测量。
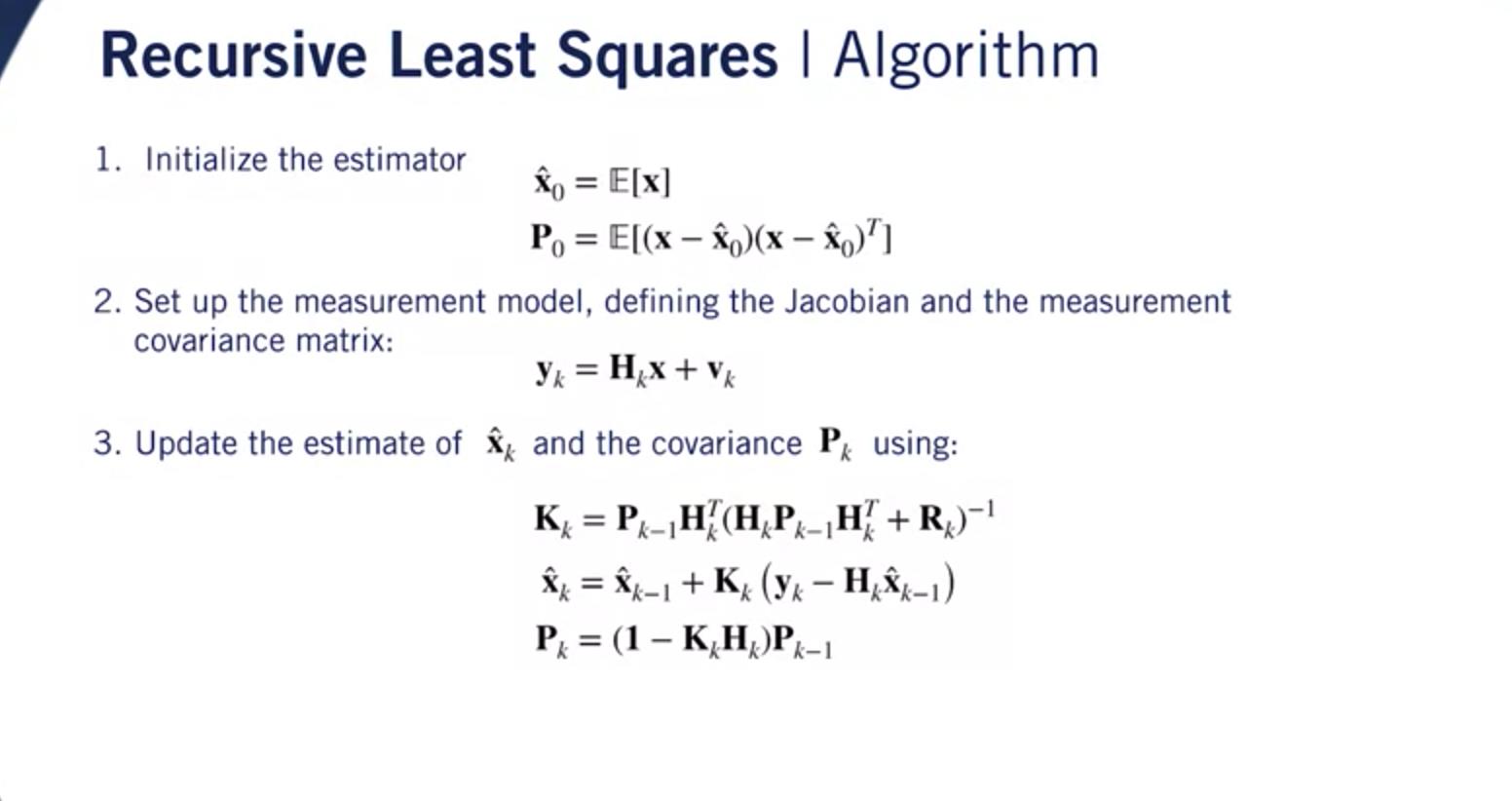
把所有的东西放在一起, 我们的最小二乘算法 看起来像这样。
我们初始化 算法估计 我们的未知参数和 相应的协方差矩阵。
这个最初的猜测可能会出现 从第一次测量我们 取和协方差 可能来自技术规范。
接下来,我们设置 我们的测量模型和选择 我们的测量协方差的值。
最后,每次 记录测量, 我们计算测量增益 然后用它来更新我们的估计 参数和 我们的估计协方差或不确定性。
每次我们得到一个新的测量值 我们的参数不确定性缩小了。
为什么是递归最小二乘 一个重要的算法? 正如我们所见,它使我们能够最小化 计算量 在我们的估算过程中 这总是一件好事。
更重要的是,递归最小二乘 形成更新步骤 线性卡尔曼滤波器。
我们将更详细地讨论这个 在下一个模块中。
在您即将进行的分级评估中, 你会得到一些使用经验 递归最小二乘法来确定 电压值来自 一系列的测量。
总结一下, 递归最小二乘算法 让我们生产 运行估计 一个参数而没有 有整批 手头的测量 和递归最小二乘法是 递归线性估计器 最小化方差 当前时间的参数。
在本模块的下一个也是最后一个视频中, 我们将讨论为什么要最小化 平方误差是 合理的做法 连接方法 使用另一种技术的最小二乘法 从统计,最大值 似然估计。
第 2 课补充阅读:递归最小二乘法
补充阅读:递归最小二乘法
要了解有关递归最小二乘法的更多信息,请查看以下资源:
-
阅读Dan Simon, Optimal State Estimation (2006) 的第 3 章第 3 节。
参考
https://www.coursera.org/learn/state-estimation-localization-self-driving-cars/lecture/0UbTb/lesson-2-recursive-least-squares
以上是关于自动驾驶 8-3: 递归最小二乘法Recursive Least Squares的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶 8-4: 最小二乘法和最大似然法 Least Squares and the Method of Maximum Likelihood
自动驾驶 8-2: 平方误差准则和最小二乘法 (下) Squared Error Criterion and the Method of Least Squares (Part 2)
自动驾驶 8-1: 平方误差准则和最小二乘法 (上) Squared Error Criterion and the Method of Least Squares (Part 1)
自动驾驶 11-2: 激光雷达传感器模型和点云 LIDAR Sensor Models and Point Clouds
自动驾驶 11-2: 激光雷达传感器模型和点云 LIDAR Sensor Models and Point Clouds