OpenCV-获取图像中圆线上的数据
Posted 翟天保Steven
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OpenCV-获取图像中圆线上的数据相关的知识,希望对你有一定的参考价值。
作者:翟天保Steven
版权声明:著作权归作者所有,商业转载请联系作者获得授权,非商业转载请注明出处
需求说明
在对图像进行处理时,经常会有这类需求:客户想要提取出图像中某条直线、圆线或者ROI区域内的感兴趣数据,进行重点关注。该需求在图像检测领域尤其常见。ROI区域一般搭配Rect即可完成提取,直线和圆线数据的提取没有现成的函数,需要自行实现。
直线的提取见:
OpenCV-获取图像中直线上的数据_翟天保的博客-CSDN博客
而圆线的提取则是本文要将的内容,对圆线而言,将线上某点作为起点,沿顺时针或逆时针方向依次提取感兴趣数据,可放置在容器中。那么如何快速提取呢?本文提供了一种比较简单的思路,应用窗口模板,在窗口中快速找到下一可前进点的位置,步进然后再找下个点,形成路径追踪,进而实现整圈圆线数据的提取。
具体流程
1)初始化。设置路径追踪窗口尺寸size为3,创建path作为行进路径,p点作为起点,c用来存放目标数据点。
cv::Mat c;
int size = 3;
cv::Mat path = mask.clone();
Point p = Point(center.x + radius, center.y);2)将起点放置在c中,将path中的起点值置0,表示该点已经走过。
c.push_back(src.at<uchar>(p.y, p.x));
path.at<uchar>(p.y, p.x) = 0;3)用WinDataNum函数判断当前点的窗口内有几个可前进点,若无则说明路径封死或者完成路径,wn值表示可前进点的个数。
int wn = WinDataNum(path, p, size);4)窗口内遍历,查看是否有可前进路径,若找到,则将当前点信息刷新为此点,并将标记符find设为true,find的意义是快速中断遍历,用来提速。
int t = size / 2;
bool find = false;
for (int i = p.y - t; i <= p.y + t; ++i)
uchar *g = path.ptr<uchar>(i);
for (int j = p.x - t; j <= p.x + t; ++j)
if (g[j] == 255)
p.x = j;
p.y = i;
find = true;
break;
if (find)
break;
5)若找到了点,即find为true,则将该点的数据存放在c中,path中置0,并以该点为中心搜索窗口内可前进路径。
if (find)
c.push_back(src.at<uchar>(p.y, p.x));
path.at<uchar>(p.y, p.x) = 0;
wn = WinDataNum(path, p, size);
else
break;6)若wn为0了,则说明路径封死或者完成路径了,跳出循环,函数执行完毕。
while (wn)
int t = size / 2;
bool find = false;
for (int i = p.y - t; i <= p.y + t; ++i)
uchar *g = path.ptr<uchar>(i);
for (int j = p.x - t; j <= p.x + t; ++j)
if (g[j] == 255)
p.x = j;
p.y = i;
find = true;
break;
if (find)
break;
if (find)
c.push_back(src.at<uchar>(p.y, p.x));
path.at<uchar>(p.y, p.x) = 0;
wn = WinDataNum(path, p, size);
else
break;
功能函数
// 获取圆圈上的数据,逆时针存储,起点在中心同行最右侧数据
cv::Mat getCircleData(cv::Mat src, cv::Mat mask, cv::Point center, int radius)
cv::Mat c;
int size = 3;
cv::Mat path = mask.clone();
Point p = Point(center.x + radius, center.y);
c.push_back(src.at<uchar>(p.y, p.x));
path.at<uchar>(p.y, p.x) = 0;
int wn = WinDataNum(path, p, size);
while (wn)
int t = size / 2;
bool find = false;
for (int i = p.y - t; i <= p.y + t; ++i)
uchar *g = path.ptr<uchar>(i);
for (int j = p.x - t; j <= p.x + t; ++j)
if (g[j] == 255)
p.x = j;
p.y = i;
find = true;
break;
if (find)
break;
if (find)
c.push_back(src.at<uchar>(p.y, p.x));
path.at<uchar>(p.y, p.x) = 0;
wn = WinDataNum(path, p, size);
else
break;
return c;
// 获取窗口内的有效数据个数
int WinDataNum(cv::Mat path, cv::Point p, int size)
int number = 0;
int t = size / 2;
for (int i = p.y - t; i <= p.y + t; ++i)
uchar *g = path.ptr<uchar>(i);
for (int j = p.x - t; j <= p.x + t; ++j)
if (g[j] == 255)
number++;
return number;
C++测试代码
#include <iostream>
#include <opencv2/opencv.hpp>
#include <string>
using namespace std;
using namespace cv;
cv::Mat getCircleData(cv::Mat src, cv::Mat mask, cv::Point center, int radius);
int WinDataNum(cv::Mat path, cv::Point p, int size);
int main()
cv::Mat src = imread("test.jpg", 0);
cv::Mat mask = cv::Mat::zeros(src.size(), CV_8UC1);
cv::Point center = cv::Point(src.cols / 2, src.rows / 2);
int radius = min(src.cols, src.rows) / 2 - 10;
circle(mask, center, radius, Scalar(255), 1, 8);
cv::Mat c = getCircleData(src, mask, center, radius);
src.setTo(0, mask == 0);
imshow("src", src);
imshow("mask", mask);
waitKey(0);
return 0;
// 获取圆圈上的数据,逆时针存储,起点在中心同行最右侧数据
cv::Mat getCircleData(cv::Mat src, cv::Mat mask, cv::Point center, int radius)
cv::Mat c;
int size = 3;
cv::Mat path = mask.clone();
Point p = Point(center.x + radius, center.y);
c.push_back(src.at<uchar>(p.y, p.x));
path.at<uchar>(p.y, p.x) = 0;
int wn = WinDataNum(path, p, size);
while (wn)
int t = size / 2;
bool find = false;
for (int i = p.y - t; i <= p.y + t; ++i)
uchar *g = path.ptr<uchar>(i);
for (int j = p.x - t; j <= p.x + t; ++j)
if (g[j] == 255)
p.x = j;
p.y = i;
find = true;
break;
if (find)
break;
if (find)
c.push_back(src.at<uchar>(p.y, p.x));
path.at<uchar>(p.y, p.x) = 0;
wn = WinDataNum(path, p, size);
else
break;
return c;
// 获取窗口内的有效数据个数
int WinDataNum(cv::Mat path, cv::Point p, int size)
int number = 0;
int t = size / 2;
for (int i = p.y - t; i <= p.y + t; ++i)
uchar *g = path.ptr<uchar>(i);
for (int j = p.x - t; j <= p.x + t; ++j)
if (g[j] == 255)
number++;
return number;
测试效果

如图1图2所示,掩膜内的图像数据就是我们要提取的目标。
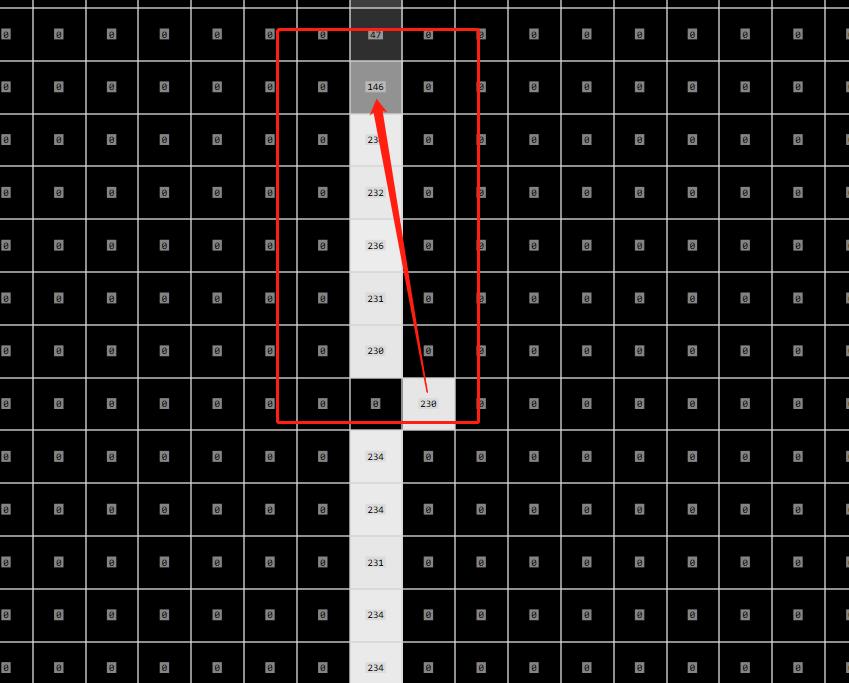
图3放大后可以看出,起点是230,之后的数据是230、231、236、232、234、146等等,再看c容器中的数据。
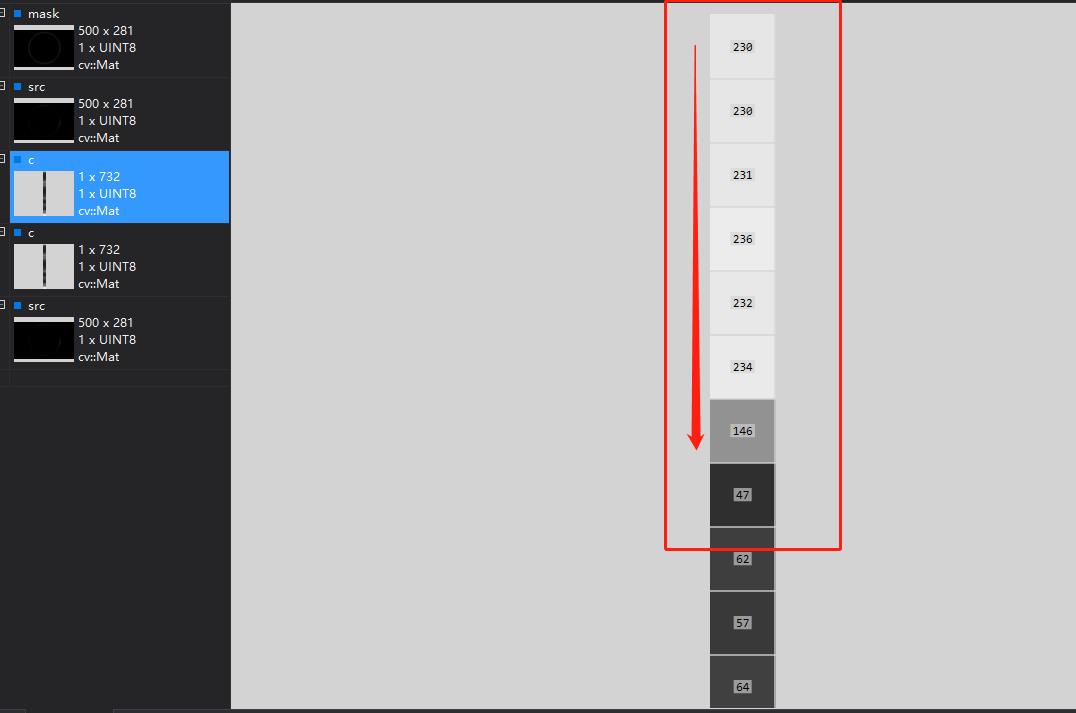
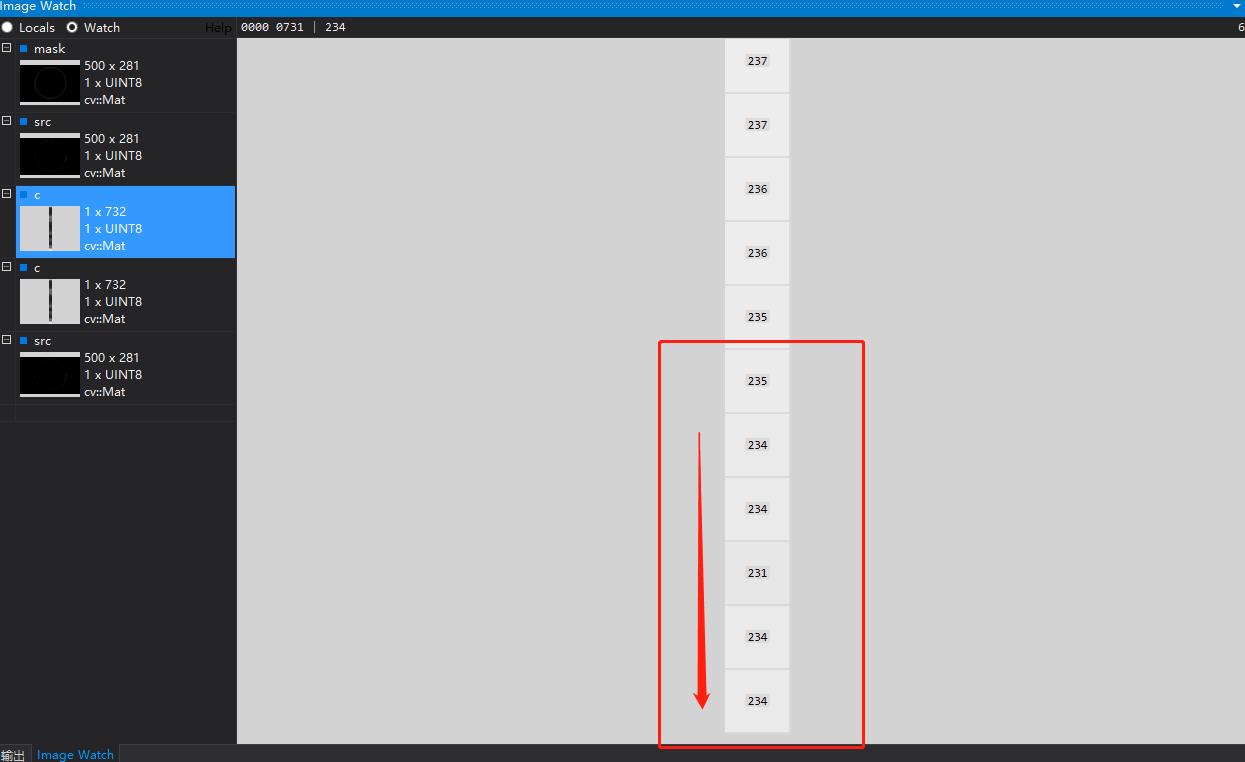
对比完开头,再看结尾,如图3所示,是234、234、231、234、234,然后就是起点230,查看容器。
这样有的小伙伴可能觉得中间会不会有数据错误呢,很简单,打开VS复制代码后,搭配ImageWatch插件,debug调试打断点观察path矩阵,看看它的255数据是不是按预想的路径消失,如果是则说明扔的数据也没有问题。
本文提供的只是一个简单思路,有一定局限性。比如该方法在圆线宽为1时效果最佳,若线宽大了就不能用窗口简单判断了;另外,起点在右侧时是逆时针获取数据,起点在左侧时是顺时针获取数据,如果想统一标准的话,最好加上起点的位置判断,然后决定是否将c的数据翻转。至于运行速度方面,3000*3000的图像矩阵中运行基本为0ms,毕竟只是提取了一条圆线而已。
如果函数有什么可以改进完善的地方,非常欢迎大家指出,一同进步何乐而不为呢~
如果文章帮助到你了,可以点个赞让我知道,我会很快乐~加油!
以上是关于OpenCV-获取图像中圆线上的数据的主要内容,如果未能解决你的问题,请参考以下文章