基于ICP算法计算点集之间的变换矩阵(旋转平移)
Posted 一颗小树x
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于ICP算法计算点集之间的变换矩阵(旋转平移)相关的知识,希望对你有一定的参考价值。
前言
本文主要是计算两个激光雷达之间的变换矩阵,即计算两组点云之间的变换矩阵。其中处理的点云数据主要是由x,y,z,intensity组成的,代表空间位置x,ry,z 和每个点云对应的反射强度intensity;
这里计算点集之间的变换矩阵,用到每个点云的x,y,z信息,可表示为n*3的数组;两组激光雷达点云,可以表示为2和n*3的数组。
首先使用ICP点云匹配算法,计算两组点云之n*3的数组间对应的点;然后基于SVD算法求出两个对应点集合的旋转矩阵R和转移矩阵t。
目录
一、基于ICP匹配对应点
基于点的匹配算法中常用最多的是 ICP(Iterative Closest Point)算法;其实质是基于两个集合中最近点对的搜索,并且估计将它们对齐的“刚性变换”。然后,将刚性变换应用于一个集合的点,并迭代该过程直到收敛。
优点:原理简单、易于理解和实现,同时配准精度较高。
弊端:ICP 算法在迭代初期就必须确定初始位置,如果初始位置估计不准确,与实际位置相差较大,则可能会产生局部最优解。并且,ICP 算法在每次迭代时都要对点集内所有点进行对应点搜索。
应用:ICP 算法不需要事先对目标进行特征提取和分割,可以直接对点云进行处理。
使用ICP进行点云配准,基本思路是:对于两片待配准的点云,首先寻找两个点云中的对应点间的对应关系,计算出两片点云间的坐标变换参数,然后通过三维刚体变换,将两片待配准点云的坐标系调整到一致,从而完成 两片点云在三维空间中的配准。
ICP 配准算法流程图,如下所示:
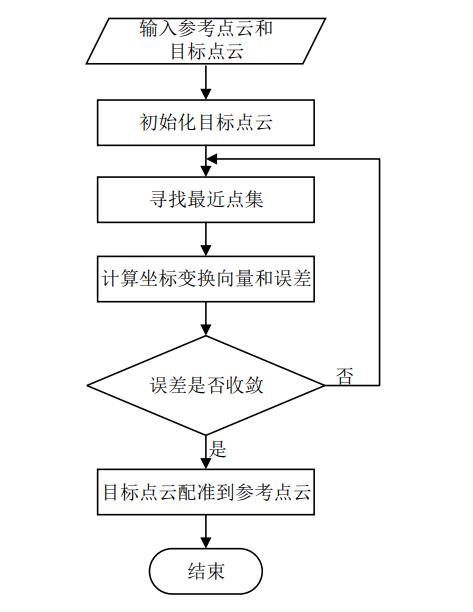
在迭代初期,数据点可能和其对应点距离很远,但随着迭代次数的增加它们距 离越来越近。ICP 算法可以单调收敛到局部最小值,可能导致陷入局部极值,所以初值的选取尤为重要。
二、计算变换矩阵
假设激光雷达1的点云数据,表示为A数组,结构是n*3;激光雷达2的点云数据,表示为B数组,结构也是n*3;A和B数组已经通过ICP算法,进行一一匹配了。
注意:这里的点最少需要3个,即n>=3;点多一些,计算得更精准一些。
2.1 思路
对于无噪声数据,两个点集之间的 旋转矩阵R 和 平移向量t,可以表示为:
 (R 是一个 3×3 旋转矩阵,t 是 1×3平移向量。)
(R 是一个 3×3 旋转矩阵,t 是 1×3平移向量。)
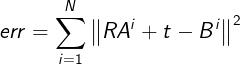
对于有噪声数据,它将最小化最小二乘误差,两个点集之间的 旋转矩阵R 和平移向量t,可以表示为:
无噪声数据、或有噪声数据,计算R和t,通常都需要三步:
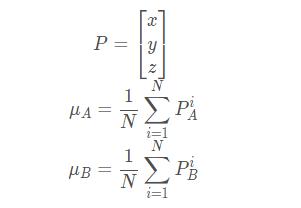
- 计算点集合的中心点(质心)
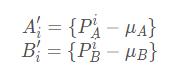
- 将点集合移动到原点,然后找到最优旋转矩阵R
- 计算转移矩阵t
2.2 计算中心点
这里是点的平均值,计算如下:
2.3 将点集合移动到原点
需要将点集重新中心化,生成新点集合 ,公式如下:
,公式如下:
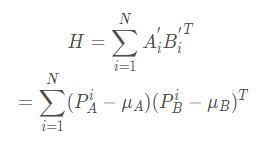
2.4 计算协方差矩阵H
计算点集之间的协方差矩阵H,公式如下:
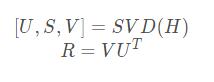
2.5 计算旋转矩阵R
通过SVD方法获得矩阵的U、S和V,可以计算点集之间的旋转矩阵R,公式如下:
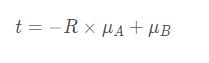
2.6 计算平移向量t
通过R可以获得转移矩阵t,公式如下:
关于SVD补充一下:
奇异值分解(SVD)维基百科:https://en.wikipedia.org/wiki/Singular_value_decomposition
SVD的数学推导文档:https://igl.ethz.ch/projects/ARAP/svd_rot.pdf
三、实现代码案例
大佬们有相关的代码开源了,Python实现的:GitHub - ClayFlannigan/icp: iterative closest point
这里考虑了有噪声的数据;
import numpy as np
from sklearn.neighbors import NearestNeighbors
def best_fit_transform(A, B):
'''
计算在 m 个空间维度上映射对应点 A 到 B 的最小二乘最佳拟合变换
输入:
A:对应点的Nxm numpy数组
B:对应点的Nxm numpy数组
返回:
T:(m+1)x(m+1) 将 A 映射到 B 的齐次变换矩阵
R:mxm 旋转矩阵
t: mx1 平移向量
'''
assert A.shape == B.shape
# 获取维数
m = A.shape[1]
# 将点转换为它们的质心(中心点)
centroid_A = np.mean(A, axis=0)
centroid_B = np.mean(B, axis=0)
AA = A - centroid_A
BB = B - centroid_B
# rotation matrix
H = np.dot(AA.T, BB)
U, S, Vt = np.linalg.svd(H)
R = np.dot(Vt.T, U.T)
# special reflection case
if np.linalg.det(R) < 0:
Vt[m-1,:] *= -1
R = np.dot(Vt.T, U.T)
# translation
t = centroid_B.T - np.dot(R,centroid_A.T)
# homogeneous transformation
T = np.identity(m+1)
T[:m, :m] = R
T[:m, m] = t
return T, R, t
def nearest_neighbor(src, dst):
'''
为 src 中的每个点在 dst 中找到最近的(欧几里得)邻居
输入:
src: Nxm 点数组
dst: Nxm 点数组
输出:
距离:最近邻居的欧几里德距离
索引:最近邻居的 dst 索引
'''
assert src.shape == dst.shape
neigh = NearestNeighbors(n_neighbors=1)
neigh.fit(dst)
distances, indices = neigh.kneighbors(src, return_distance=True)
return distances.ravel(), indices.ravel()
def icp(A, B, init_pose=None, max_iterations=20, tolerance=0.001):
'''
迭代最近点方法:找到将点 A 映射到点 B 的最佳拟合变换
输入:
A: Nxm numpy 源 mD 点数组
B:目标 mD 点的 Nxm numpy 数组
init_pose: (m+1)x(m+1) 齐次变换
max_iterations: max_iterations 后退出算法
tolerance:容差收敛标准
输出:
T:将 A 映射到 B 的最终齐次变换
距离:最近邻居的欧几里得距离(误差)
i:要收敛的迭代次数
'''
assert A.shape == B.shape
# 获取维数
m = A.shape[1]
# 使点同种类的(points homogeneous),复制它们以保持原件
src = np.ones((m+1,A.shape[0]))
dst = np.ones((m+1,B.shape[0]))
src[:m,:] = np.copy(A.T)
dst[:m,:] = np.copy(B.T)
# 应用初始姿态估计
if init_pose is not None:
src = np.dot(init_pose, src)
prev_error = 0
for i in range(max_iterations):
# 找到当前源点和目标点之间的最近邻居
distances, indices = nearest_neighbor(src[:m,:].T, dst[:m,:].T)
# 计算当前源点和最近目标点之间的变换
T,_,_ = best_fit_transform(src[:m,:].T, dst[:m,indices].T)
# 更新当前源 矩阵相乘 T*src
src = np.dot(T, src)
# 检查错误
mean_error = np.mean(distances)
if np.abs(prev_error - mean_error) < tolerance:
break
prev_error = mean_error
# 计算最终变换
T,_,_ = best_fit_transform(A, src[:m,:].T)
return T, distances, i
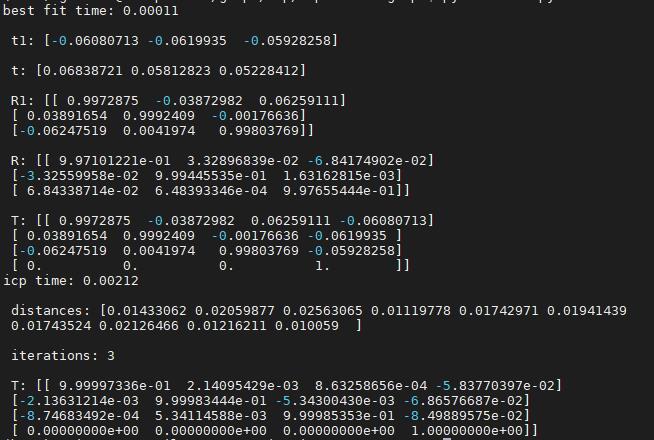
效果:
参考文献
[1] 钟海兴.特定场景下智能车的融合定位及导航策略研究[D].华南理工大学,2019.
[2] 李雨欣. 基于激光雷达的点云数据处理算法研究[D]. 长春理工大学, 2020.
[3] Finding optimal rotation and translation between corresponding 3D points | Nghia Ho
[4] https://igl.ethz.ch/projects/ARAP/svd_rot.pdf
[5] 计算两个对应点集之间的旋转矩阵R和转移矩阵T_u012836279的专栏-CSDN博客
变换矩阵 开源代码:https://en.wikipedia.org/wiki/Kabsch_algorithm
ICP开源代码:GitHub - ClayFlannigan/icp: iterative closest point
GitHub - agnivsen/icp: A tutorial on iterative closest point using Python
本文直供大家参考和学习,谢谢。
以上是关于基于ICP算法计算点集之间的变换矩阵(旋转平移)的主要内容,如果未能解决你的问题,请参考以下文章