matlab练习程序(对应点集配准的四元数法)
Posted tiandsp
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了matlab练习程序(对应点集配准的四元数法)相关的知识,希望对你有一定的参考价值。
这个算是ICP算法中的一个关键步骤,单独拿出来看一下。
算法流程如下:
1.首先得到同名点集P和X。
2.计算P和X的均值up和ux。
3.由P和X构造协方差矩阵sigma。
4.由协方差矩阵sigma构造4*4对称矩阵Q。
5.计算Q的特征值与特征向量。其中Q最大特征值对应的特征向量即为最佳旋转向量q。
6.通过四元数q得到旋转矩阵R。
7.根据R计算最佳平移向量qr。
具体公式我就不贴图了,可以参考这篇“ICP算法在点云配准中的应用”论文的3.1节。
处理效果如下:
原始点集:
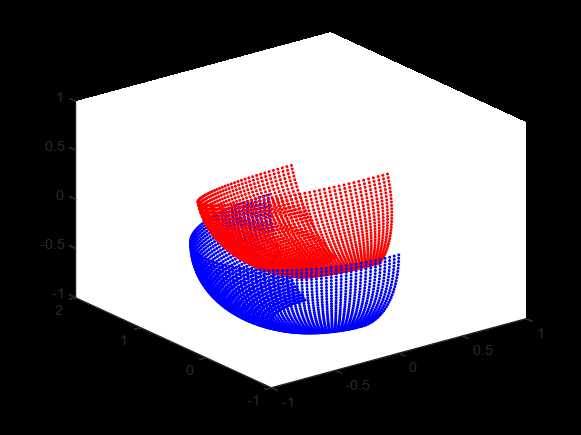
其中蓝点为原始点集,红点为旋转平移后的点集。
配准后点集:
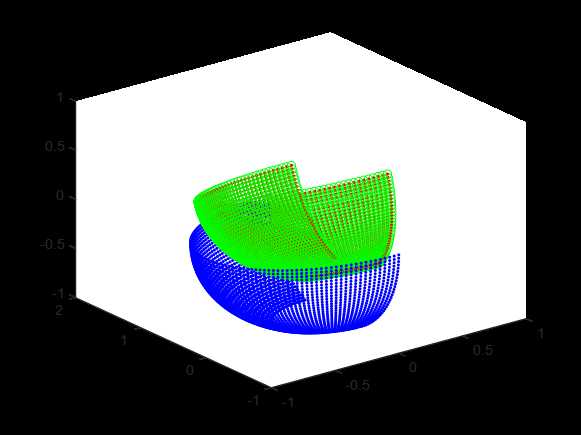
计算得到的旋转平移矩阵,通过对蓝点集进行转换得到绿点集,比较红点集与绿点集是否基本一致。
matlab代码如下:
clear all; close all; clc; %生成原始点集 X=[];Y=[];Z=[]; for i=-180:2:180 for j=-90:2:90 x = i * pi / 180.0; y = j * pi / 180.0; X =[X,cos(y) * cos(x)]; Y =[Y,sin(y) * cos(x)]; Z =[Z,sin(x)]; end end P=[X(1:3000)‘ Y(1:3000)‘ Z(1:3000)‘]; %生成变换后点集 i=0.5;j=0.3;k=0.7; Rx=[1 0 0;0 cos(i) -sin(i); 0 sin(i) cos(i)]; Ry=[cos(j) 0 sin(j);0 1 0;-sin(j) 0 cos(j)]; Rz=[cos(k) -sin(k) 0;sin(k) cos(k) 0;0 0 1]; R=Rx*Ry*Rz; X=P*R + [0.2,0.3,0.4]; plot3(P(:,1),P(:,2),P(:,3),‘b.‘); hold on; plot3(X(:,1),X(:,2),X(:,3),‘r.‘); %计算点集均值 up = mean(P); ux = mean(X); P1=P-up; X1=X-ux; %计算点集协方差 sigma=P1‘*X1/(length(X1)); sigma_mi = sigma - sigma‘; M=sigma+sigma‘-trace(sigma)*[1,0,0;0,1,0;0,0,1]; %由协方差构造4*4对称矩阵 Q=[trace(sigma) sigma_mi(2,3) sigma_mi(3,1) sigma_mi(1,2); sigma_mi(2,3) M(1,1) M(1,2) M(1,3); sigma_mi(3,1) M(2,1) M(2,2) M(2,3); sigma_mi(1,2) M(3,1) M(3,2) M(3,3)]; %计算特征值与特征向量 [x,y] = eig(Q); e = diag(y); %计算最大特征值对应的特征向量 lamda=max(e); for i=1:length(Q) if lamda==e(i) break; end end q=x(:,i); q0=q(1);q1=q(2);q2=q(3);q3=q(4); %由四元数构造旋转矩阵 RR=[q0^2+q1^2-q2^2-q3^2 ,2*(q1*q2-q0*q3), 2*(q1*q3+q0*q2); 2*(q1*q2+q0*q3), q0^2-q1^2+q2^2-q3^2, 2*(q2*q3-q0*q1); 2*(q1*q3-q0*q2), 2*(q2*q3+q0*q1), q0^2-q1^2-q2^2+q3^2]; %计算平移向量 qr=ux-up*RR‘; %验证旋转矩阵与平移向量正确性 Pre = P*RR‘+qr; figure; plot3(P(:,1),P(:,2),P(:,3),‘b.‘); hold on; plot3(X(:,1),X(:,2),X(:,3),‘r.‘); plot3(Pre(:,1),Pre(:,2),Pre(:,3),‘go‘);
以上是关于matlab练习程序(对应点集配准的四元数法)的主要内容,如果未能解决你的问题,请参考以下文章