[rrt_algorithm]rrt算法以及伪代码
Posted AIplusX
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[rrt_algorithm]rrt算法以及伪代码相关的知识,希望对你有一定的参考价值。
写在前面
这个系列的文章将会分享rrt算法的实现结果以及伪代码思路。rrt算法是基于采样的路径规划算法,与A*算法的基于搜索是不同的。
算法实现过程中遇到了一些困难,类似距离计算公式写错等低级错误,也有路径探索方向写错等算法理解错误,这些我都将在后续文章中提出。
为了算法的运行,我还写了一些调试函数,包括atan2()使用的使用可视化,这些我也会在后续文章中进行展示。
结果展示
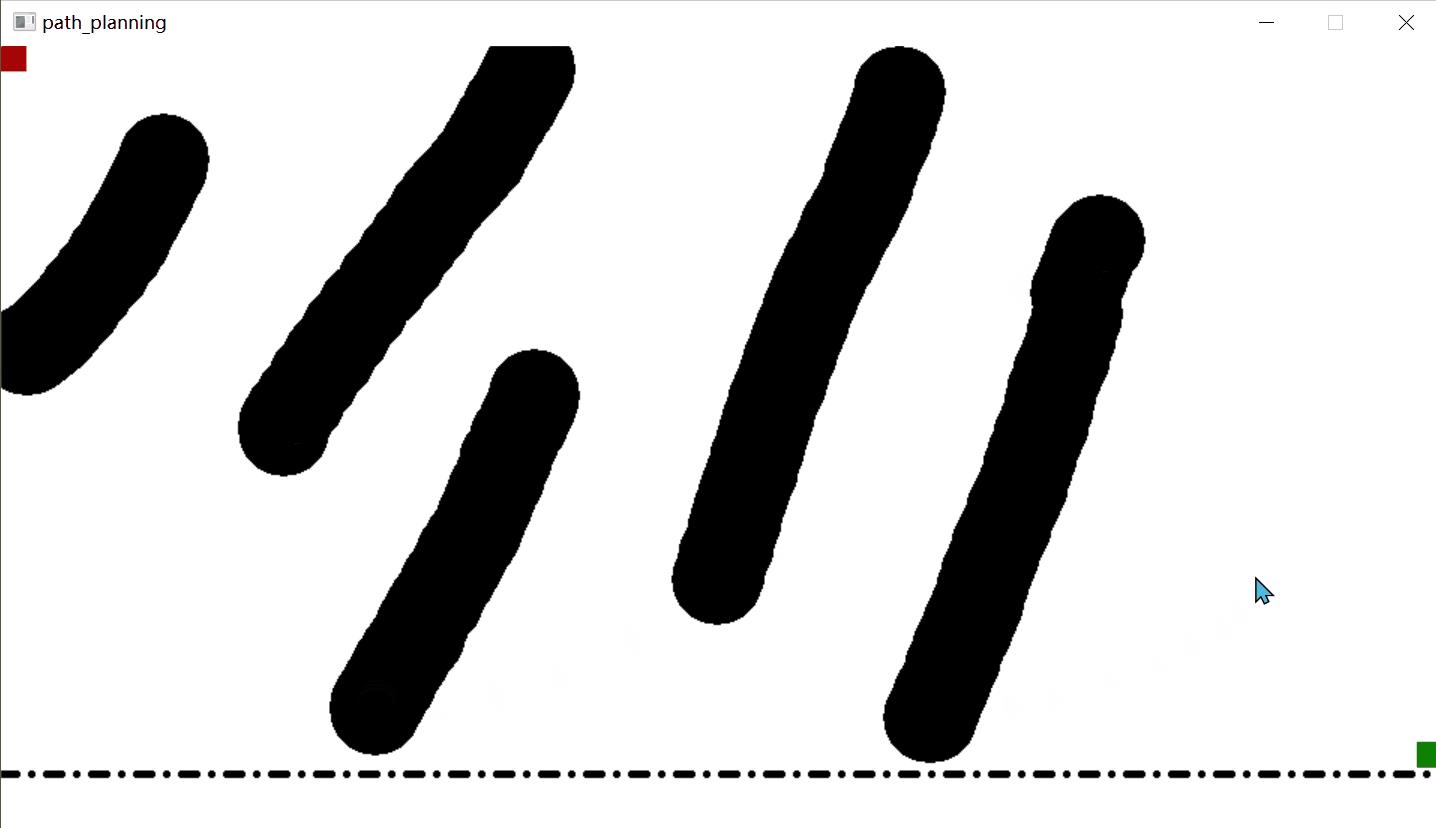
黑色:障碍物(可由鼠标绘制);
绿色线段:探索路径;
绿色方块:终点
红色方块:起点
棕色线段:最终路径
点划线:路径探索下边界
绿色原点:代表算法开始运行
算法逻辑
rrt算法之所以叫做基于采样的路径规划算法,也是因为他的探索方向是随机的,也就是概率完备的,在路径存在的情况下,只要搜索的次数够多,内存够大,rrt算法总能找到路径。
以上是关于[rrt_algorithm]rrt算法以及伪代码的主要内容,如果未能解决你的问题,请参考以下文章
[rrt_algorithm04]基于easyX的任意障碍物绘制
[rrt_algorithm03]基于easyX的交互界面实现