ROS学习笔记之——基于已有的rosbag重新录制rosbag
Posted gwpscut
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS学习笔记之——基于已有的rosbag重新录制rosbag相关的知识,希望对你有一定的参考价值。
首先通过下面命令查看当前rosbag的topic
rosbag info rslidar-outdoor-gps.bag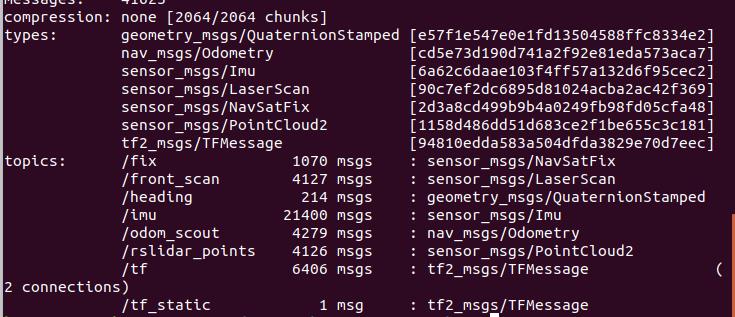
此处把tf去掉
rosbag record /imu /odom_scout /fix /front_scan /heading /rslidar_points /tf_static但在执行前还需要执行
rosparam set use_sim_time true
rosparam get use_sim_time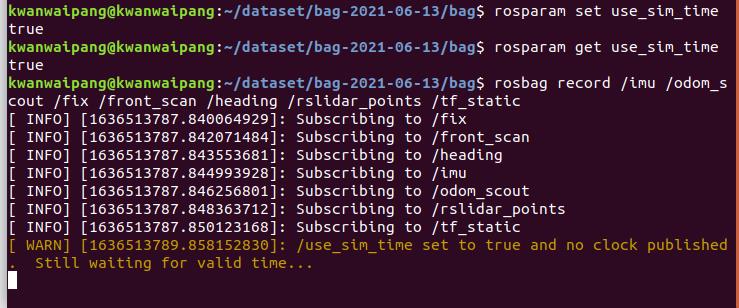
运行下面的就可以运行,让整个ros的时间用bag里面的时间
rosbag play --clock rslidar-outdoor-gps.bag即可
等包录制好后,查看
rosbag info rslidar-outdoor-gps-notf.bag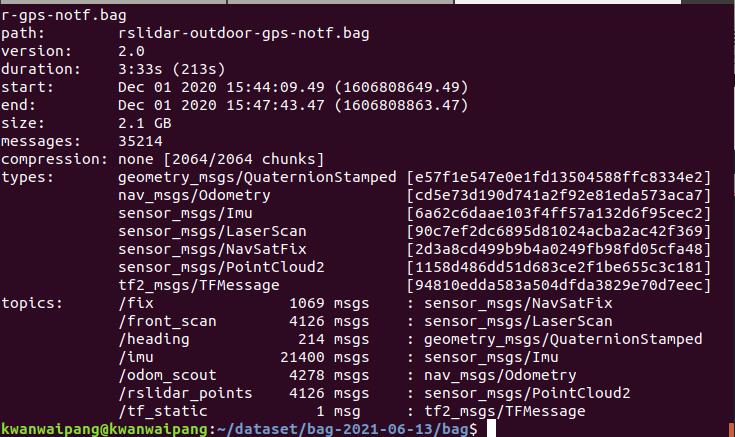
以上是关于ROS学习笔记之——基于已有的rosbag重新录制rosbag的主要内容,如果未能解决你的问题,请参考以下文章
ROS学习笔记51--rosbag管理工具分享:时间戳过滤话题过滤多包过滤
ROS学习笔记51--rosbag管理工具分享:时间戳过滤话题过滤多包过滤