第十七届智能车竞赛赛题规划
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十七届智能车竞赛赛题规划相关的知识,希望对你有一定的参考价值。

简 介: 本文汇总了一些第十七届智能车竞赛竞速比赛赛题规划方面的内容,为正式《智能车竞赛比赛规则》提供原始资料。最终的比赛规则请参见竞赛网站<smartcar.cdstm.cn>上公布的内容。
关键词: 全国大学生智能车竞赛,赛题规划
§01 赛题综合信息
一、赛题汇总一览表
| 序 号 | 组别 名称 | 赛道 环境 | 任务描述 | 传感器 | MCU平台 | 车模 |
|---|---|---|---|---|---|---|
| 1 | 四轮 竞速组 | 室内 往返 赛道 | 1.从赛道旁车库出发,左右到达赛道端点返回后入库; 2.计时标准:从出库到入库的时间间隔; | 1.摄像头、CCD、光电管; 2.不允许使用电磁导航; | Infineon | C/B/Mini |
| 2 | 多车 编队组 | 室内 循环 赛道 | 1.头车从车库出发,尾车在赛道上跟随,车队运行两周; 2. 路经三岔路口中间车插入车队; 3.第二次途径三岔路口,中间车停回三岔路口另外一边; 4.计时标准:车模出库到返回车库时间间隔+5倍尾车与头车时间差(两次); | 1. 摄像头、CCD、光电管、电磁; 2.车模之间限定使用沁恒蓝牙组网模块实现多车通信; | 1. 头车:WCH; 2.跟随车:STC | 1.头车:C/B/Mini; 2.跟随车:自制车模 |
| 3 | 单车 平衡组 | 室内 往返 赛道 | 1.从赛道旁车库出发,左右到达赛道端点返回后入库; 2.计时标准:从出库到入库的时间间隔; | 1.摄像头,CCD,光电管 | Infineon | 1.K车模; 2.车模上动量轮驱动允许采用无刷电机,采用Infineon无刷电机驱动方案; 2.允许增加动量轮,动量杆 |
| 4 | 无线 充电组 | 室内 循环 赛道 | 1. 车模完成从车库出发沿赛道运行两周入库; 2. 车模上储能电容上限小于5F; 3.赛道上(包括车库)设置3 ~ 4个无线充电线圈; 4.计时标准:从出库到入库时间间隔; 5.车模上要求 | 1.摄像头,CCD,光电管,电磁 | Infineon | F/G车模 |
| 5 | 平衡 信标组 | 室内 信标 场地 | 1.在信标场地内完成信标灯搜索灭灯; 2.计时标准:从第一个灯点亮到最后一个灯熄灭位置时间间隔 | 1.摄像头,CCD,光电管 | MindMotion | D/E车模 |
| 6 | 智能 视觉组 | 室内 信标 场地 | 1.场地内存在Apriltag标识物,位置已知; 2. 场地内随机放置5 ~ 10 个图片内容,位置已知; 3.车模从出发点出发后,依次找到图片位置并现实识别内容; 4.根据识别大类,将图片(带有磁性)搬运到赛道指定位置; 5.从车模出发开始计时,到完成所有任务结束所用时间. | 1.摄像头,光电管,HALL | NXP | H车模 |
| 7 | 极速 越野组 | 室外 操场 跑道 | 1.沿着操场赛道,或者封闭环形街道运行一周; 2.计时标准:车模从起点到终点运行时间间隔; 3.预赛采用单独排位赛;决赛采用同时出发对抗比赛; | 1. GPS,摄像,光电管等 | MindMotion | 1.L车模; 2.允许改动L车模电机,使用无刷电机;电机驱动方案采用MindMotion的无刷电机驱动方案。 |
| 8 | 专科 四轮组 | 室内 循环 赛道 | 1.从赛道旁车库出运行两周后入库; 2.计时标准:从出库到入库的时间间隔; | 1.摄像头、CCD、光电管、电磁; | 1.STC,MindMotion,NXP; 2.允许使用MicroPython完成车模制作 | 1.B,C,D,E,Mini; 2.允许自制车模 |
| 9 | 百度全模型组 | 室内 循环 赛道 | 1.从停车场(非传统车库)出发回到停车场计时比赛; 2.赛道元素以及场内元素都通过模型完成; 3.任务另文详细说明 | 1.摄像头+EdgeBoard | 1.车体控制:Infineon; 2.识别:EdgeBoard | 1.自制车模 |
二、赛道说明
1、室内环形赛道
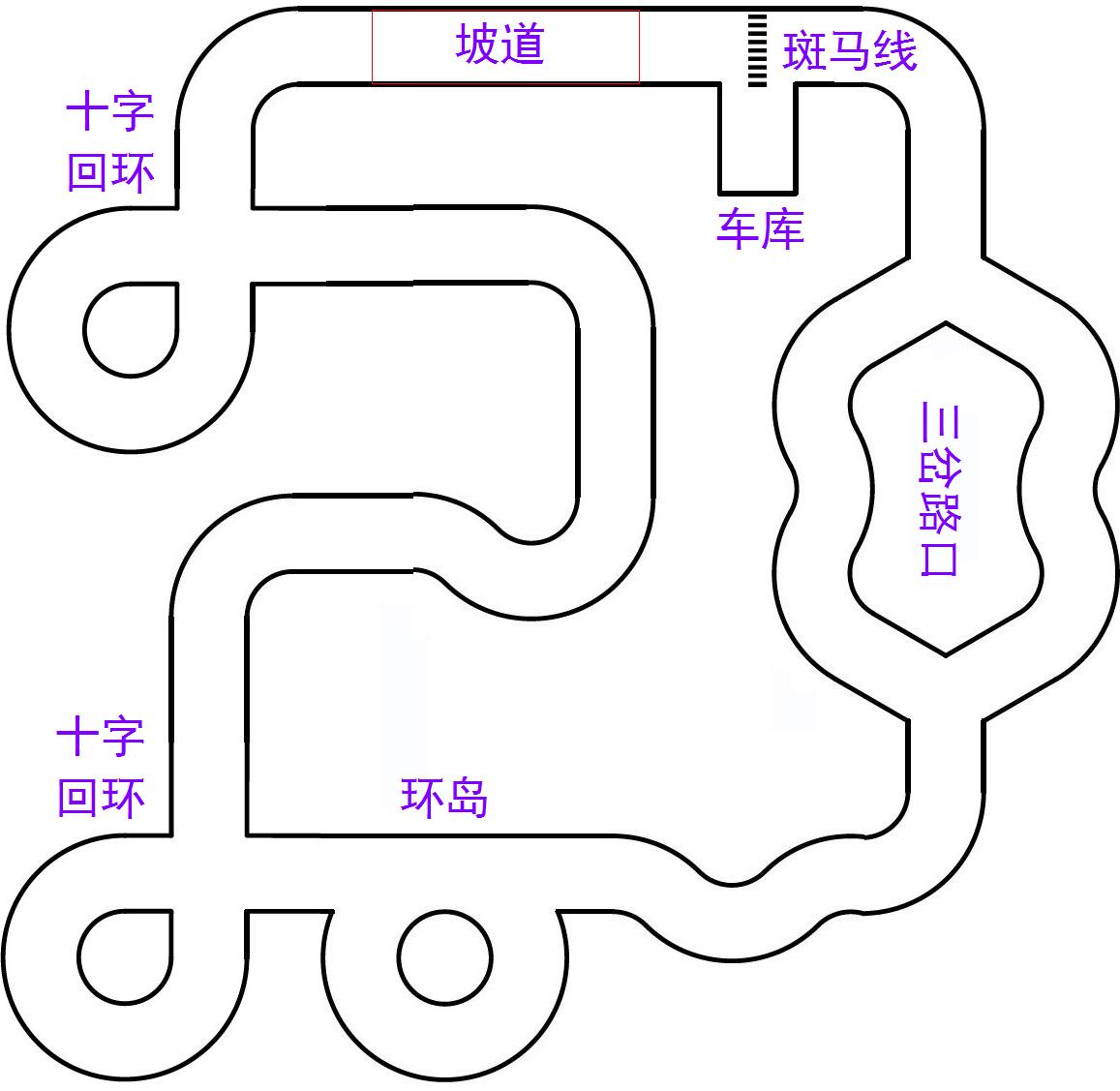
▲ 图1.2.1 室内循环赛道示意图
2、室内往返赛道
室内往返赛道是在循环赛道的基础上,将两个十字回环赛道的出口使用与赛道背景颜色相同的蓝布临时堵上,车模需要从改十字回环原路返回来时的赛道,从而形成往返赛道。
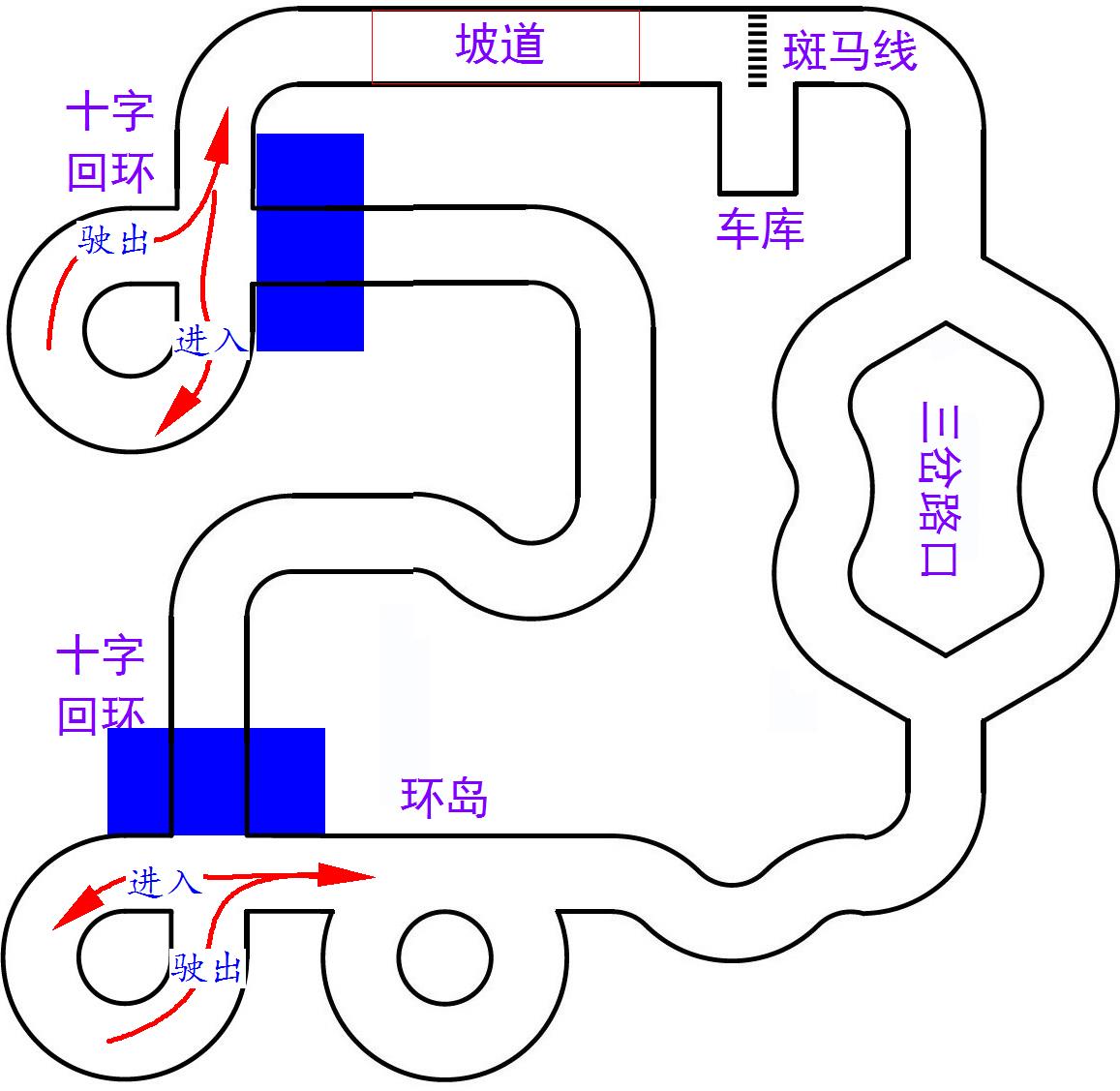
▲ 图1.2.2 室内往返赛道示意图
比赛时的往返赛道可能会根据实际场地的情况铺设成长条形式,如下图所示:
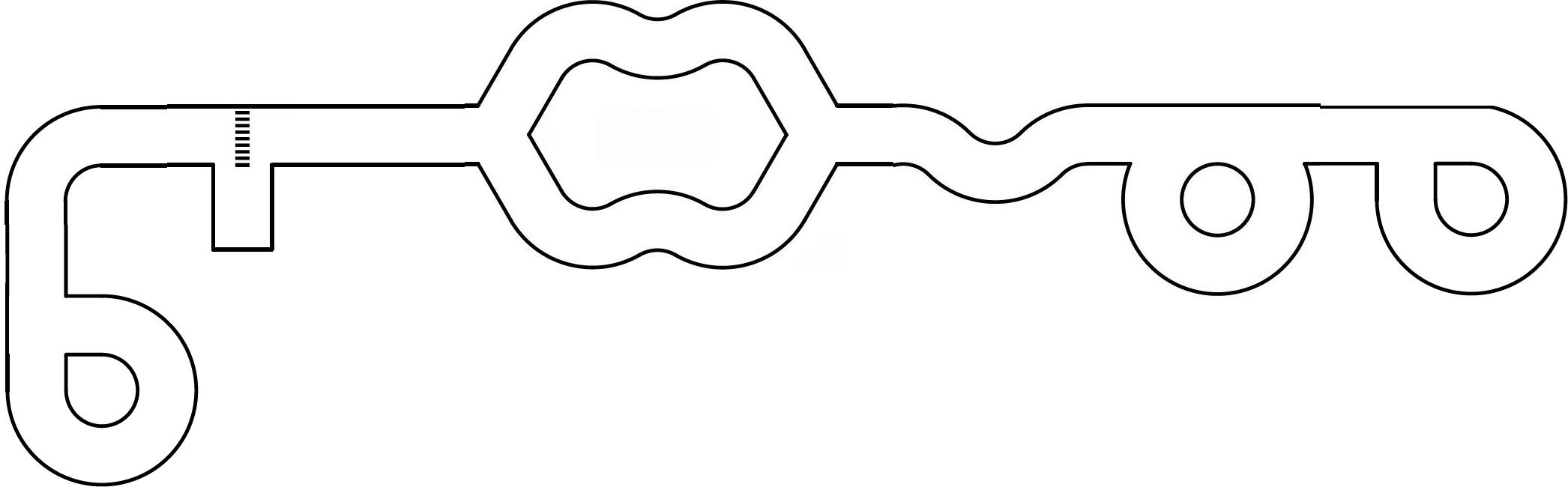
▲ 图1.2.3 比赛时往返赛道示意图
三、车模说明
§02 技术平台信息
一、各MCU平台指定产品
1、Infineon(英飞凌)
(1)MCU
TC264,TC212,TC364,TC377
(2)LED驱动
(3)无刷电机驱动
2、NXP(恩智浦)
(1)MCU
(2)智能视觉模块
3、STC(鑫晶)
(1)MCU
STC16F40K128-36I-LQFP64、STC8H8K64U-48I-LQFP64、
STC8H3K64S4-48I-LQFP48、STC8A8K64S4A12-28I-LQFP64/LQFP48,
优先推荐硬件USB芯片:STC16F40K128-36I-LQFP64、STC8H8K64U-48I-LQFP64
4、灵动
(1)MCU
MM32SPIN27PS 96MHz M0
MM32F3277G9P120MHz M3
(2)无刷电机驱动
5、沁恒
(1)MCU
CH32V307
(2)蓝牙模组
- CH9141
- CH573
二、RT-Thread
三、MicroPython
以上是关于第十七届智能车竞赛赛题规划的主要内容,如果未能解决你的问题,请参考以下文章