STM32H7教程第92章 STM32H7的FDCAN总线应用之双FDCAN实现(支持经典CAN)
Posted Simon223
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32H7教程第92章 STM32H7的FDCAN总线应用之双FDCAN实现(支持经典CAN)相关的知识,希望对你有一定的参考价值。
完整教程下载地址:http://www.armbbs.cn/forum.php?mod=viewthread&tid=86980
第92章 STM32H7的FDCAN总线应用之双FDCAN实现(支持经典CAN)
本章节为大家讲解STM32H7的带两个FDCAN控制器使用方法。CAN FD中的FD含义就是flexible data,灵活数据通信,且波特率可以和仲裁阶段波特率不同。
目录
92.3.2 STM32H7的FDCAN1和FDCAN2的区别
92.3.5 FDCAN仲裁阶段和通信阶段波特率配置(重要)
92.3.6 FDCAN的采样点位置推荐设置为85% - 90%
92.3.8 FDCAN过滤器常用的范围过滤器和经典的位屏蔽过滤器
92.1 初学者重要提示
1、 FDCAN相关知识点可以看第90和91章。
2、 CAN菊花链组网时,在两端接分别接120 Ω的终端电阻:链接地址。
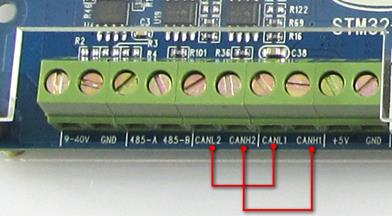
3、 FDCAN控制器外接的PHY芯片输出的是差分信号,组网接线时,注意是CANL接CANL,CANH接CANH。
4、 经典CAN每帧最大8字节,FDCAN每帧最大64字节。
5、 CAN不接外置PHY芯片,通信测试方法:链接地址。
6、 关于CAN总线是否需要供地的问题:地址
7、 CAN组网只有一个节点的情况下,接示波器看不到FDCAN数据帧波形。
8、 特别推荐瑞萨的CAN入门中英文手册,做的非常好:链接地址
9、 带隔离功能的FDCAN芯片搜集:链接地址
10、 除了本章提供的基于ST HAL库实现的双FDCAN通信,再提供个基于CMSIS-Driver的:
基于STM32H7的CMSIS-Driver驱动实现双CAN FD和双经典CAN两种方式案例发布
92.2 FDCAN硬件接口设计
STM32H7带了两个FDCAN控制器,然后外接物理层PHY芯片就可以使用了。FDCAN1和FDCAN2外接芯片原理图如下:
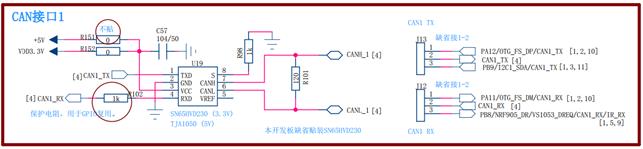
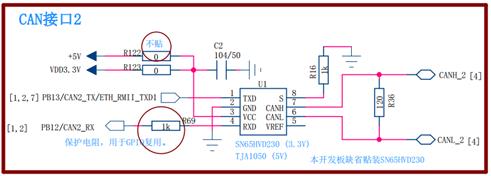
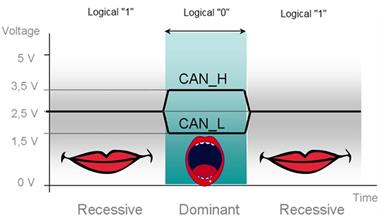
使用的PHY芯片SN65HVD230即支持经典CAN,也支持FDCAN。PHY芯片输出的是差分信号,逻辑0或者逻辑1的电平效果如下:链接地址
92.3 FDCAN基础知识
FDCAN的基础知识在第90已经做了详细说,这里补充些本章要用到的知识点。
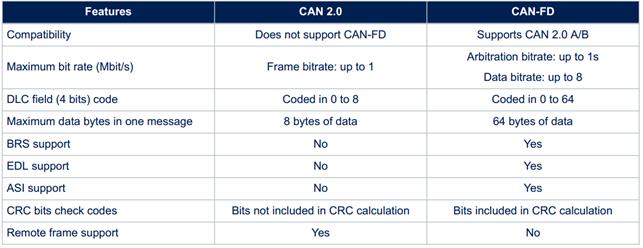
92.3.1 经典CAN和FDCAN的区别
CAN-FD的开发可以满足需要更高带宽的通信网络需求。每帧最多具有64个字节的CAN-FD以及将比特率提高到最大的可能性,使数据阶段要快8倍,在第二个仲裁阶段要恢复到正常的比特率。通过以下方式确保数据传输的完整性:
(1)17级多项式对最大16字节的有效载荷进行CRC。
(2)21级多项式对16到64字节之间的有效载荷进行校验。
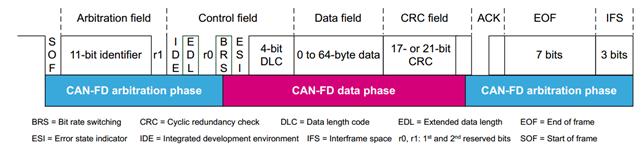
标准帧和CAN FD的区别:
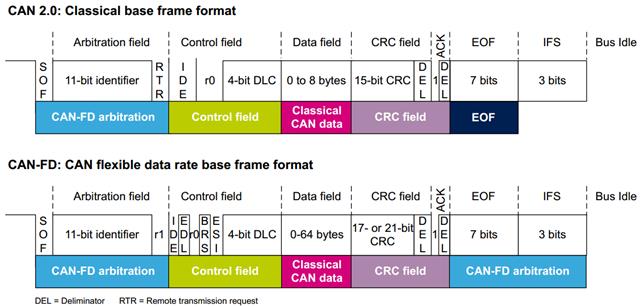
标识符后,CAN 2.0和CAN-FD具有不同的作用:
(1)CAN 2.0发送RTR位以精确确定帧类型:数据帧(RTR为主要)或远程帧(RTR)是隐性的)。
(2)由于CAN-FD仅支持数据帧,因此始终发送占优势的RRS(保留)。
IDE位保持在相同位置,并以相同的动作来区分基本格式(11位标识符)。请注意,在扩展格式的情况下,IDE位以显性或隐性方式传输(29位标识符)。
与CAN 2.0相比,在CAN-FD帧中,在控制字段中添加了三个新位:
(1)扩展数据长度(EDL)位:隐性表示帧为CAN-FD,否则该位为显性(称为R0)在CAN 2.0帧中。
(2)比特率切换(BRS):指示是否启用两个比特率(例如,当数据阶段位以不同的比特率传输到仲裁阶段)。
(3)错误状态指示器(ESI):指示节点处于错误活动模式还是错误被动模式。
控制字段的最后一部分是数据长度代码(DLC),它具有相同的位置和相同的长度(4位),用于CAN 2.0和CAN-FD。 DLC功能在CAN-FD和CAN 2.0中相同,但CAN-FD有很小变化(下表中的详细信息)。 CAN-FD扩展帧允许单个消息中发送64个数据字节,而CAN 2.0有效负载数据最多可以发送8个字节。

通过增加有效载荷数据的数据字段来改善网络带宽,因为需要更少的包处理。 同时,通过为CRC添加更多位来增强消息完整性:
(1)如果有效载荷数据最多为16个字节,则CRC以17位编码。
(2)如果有效载荷数据大于20(16)个字节,则CRC以21位编码。
另外,为了确保CAN-FD帧的鲁棒性,填充位机制支持CRC字段。下表总结了CAN-FD和CAN 2.0之间的主要区别。 提供的主要功能与CAN 2.0相比,CAN FD的改进之处在于数据有效负载的增加和速度的提高由CAN-FD中可用的BRS,EDL和ESI位来确保。
下表可帮助用户简化将STM32设备中的CAN 2.0协议升级到CAN-FD协议的过程。该表还指定了FDCAN的改进。与传统的BxCAN(基本扩展CAN)相比,FDCAN具有许多优势,包括更快的数据传输速度。速率和数据字节数的扩展,减少了帧开销。 总线负载也可以减少。 传输和接收中消息数量的增加要求RAM存储器的改进:
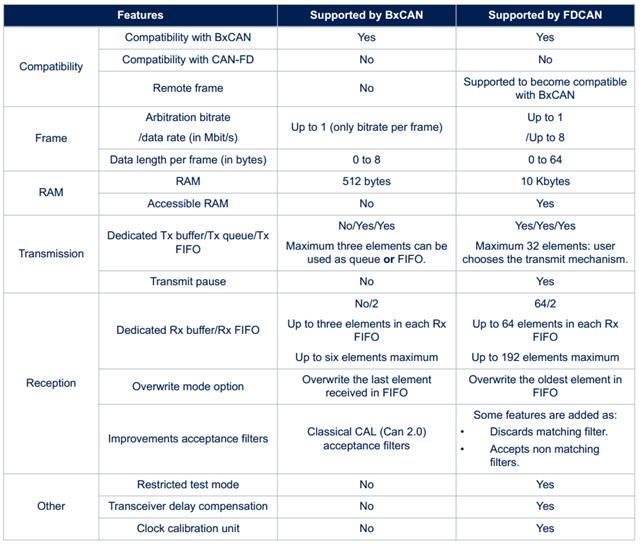
鉴于BxCAN的兼容性,BxCAN开发人员可以轻松地迁移到FDCAN,因为FDCAN可以无需对整个系统设计进行修订即可实施。 FDCAN包含所有BxCAN功能,并满足新应用程序的要求。
92.3.2 STM32H7的FDCAN1和FDCAN2的区别
仅FDCAN1支持TTCAN时间触发通信,而FDCAN2不支持。
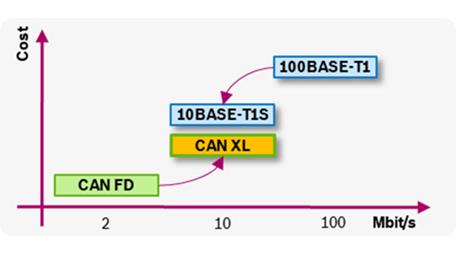
92.3.3 FDCAN支持的最高速度
经典CAN是1Mbps,CAN FD最高2Mbps,CAN FD-SiC是5-8Mbps,CAN XL是10Mbps。
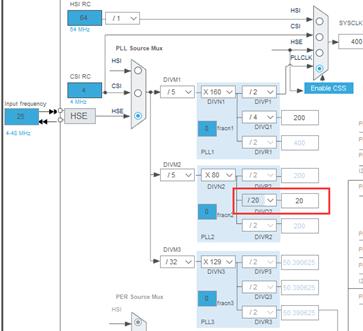
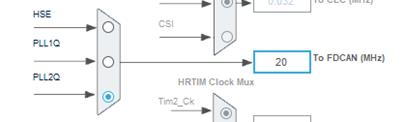
92.3.4 FDCAN的主时钟选择
FDCAN1和FDCAN2支持三种时钟源HSE,PLL1Q和PLL2Q,我们这里选择的PLL2Q输出20MHz。
92.3.5 FDCAN仲裁阶段和通信阶段波特率配置(重要)
CAN FD中的FD含义就是flexible data,灵活数据通信,且波特率可以和仲裁阶段波特率不同。看下面的图,意思就是红色部分可以是一个波特率,蓝色部分也可以是一个波特率。
波特率计算公式,看如下的位时间特性图:
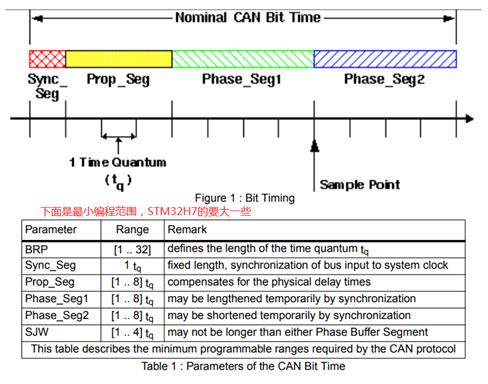
1bit的CAN FD数据需要时间由Sync_Seg + Pro_Seg + Phase_Seg1 + Phase_Seg2组成。
- 仲裁阶段波特率对应的HAL库配置如下:
/* CAN时钟分配设置,一般设置为1即可,全部由PLL配置好,tq = NominalPrescaler x (1/ fdcan_ker_ck) */
hfdcan2.Init.NominalPrescaler = 0x1;
/* 特别注意这里的Seg1,这里是两个参数之和,对应位时间特性图的 Pro_Seg + Phase_Seg1 */
hfdcan2.Init.NominalTimeSeg1 = 0x1F;
/* 对应位时间特性图的 Phase_Seg2 */
hfdcan2.Init.NominalTimeSeg2 = 0x8;
/* 用于动态调节 Phase_Seg1和 Phase_Seg1,所以不可以比Phase_Seg1和 Phase_Seg1大 */
hfdcan2.Init.NominalSyncJumpWidth = 0x8;
其中:
Sync_Seg是固定值 = 1
Pro_Seg + Phase_Seg1 = DataTimeSeg1
hase_Seg2 = DataTimeSeg2
FDCAN时钟是20MHz时,仲裁阶段的波特率就是
FDCAN Freq / (Sync_Seg + Pro_Seg + Phase_Seg1 + Phase_Seg2)
= 20MHz / (1+0x1F + 8)
= 0.5Mbps
- 数据阶段波特率对应的HAL库配置如下:
/* CAN时钟分配设置,一般设置为1即可,全部由PLL配置好,tq = NominalPrescaler x (1/ fdcan_ker_ck) */
hfdcan2.Init.DataPrescaler = 0x1;
/* 特别注意这里的Seg1,这里是两个参数之和,对应位时间特性图的 Pro_Seg + Phase_Seg1 */
hfdcan2.Init.DataTimeSeg1 = 0x5;
/* 对应位时间特性图的 Phase_Seg2 */
hfdcan2.Init.DataTimeSeg2 = 0x4;
/* 用于动态调节 Phase_Seg1和 Phase_Seg1,所以不可以比Phase_Seg1和 Phase_Seg1大 */
hfdcan2.Init.DataSyncJumpWidth = 0x4;
其中:
Sync_Seg是固定值 = 1
Pro_Seg + Phase_Seg1 = DataTimeSeg1
hase_Seg2 = DataTimeSeg2
FDCAN时钟是20MHz时,数据阶段的波特率就是
CAN FD Freq / (Sync_Seg + Pro_Seg + Phase_Seg1 + Phase_Seg2)
= 20MHz / (1+5+ 4)
= 2Mbps
STM32H7在400MHz情况下,PLL配置输出20MHz的CAN FD时钟(大家可以使用STM32CubeMX来配置的):
/* 选择PLL2Q作为FDCANx时钟 */
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_FDCAN;
PeriphClkInitStruct.PLL2.PLL2M = 5;
PeriphClkInitStruct.PLL2.PLL2N = 80;
PeriphClkInitStruct.PLL2.PLL2P = 2;
PeriphClkInitStruct.PLL2.PLL2Q = 20;
PeriphClkInitStruct.PLL2.PLL2R = 2;
PeriphClkInitStruct.PLL2.PLL2RGE = RCC_PLL2VCIRANGE_2;
PeriphClkInitStruct.PLL2.PLL2VCOSEL = RCC_PLL2VCOWIDE;
PeriphClkInitStruct.PLL2.PLL2FRACN = 0;
PeriphClkInitStruct.FdcanClockSelection = RCC_FDCANCLKSOURCE_PLL2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
92.3.6 FDCAN的采样点位置推荐设置为85% - 90%
FDCAN每个bit的时间组成如下:
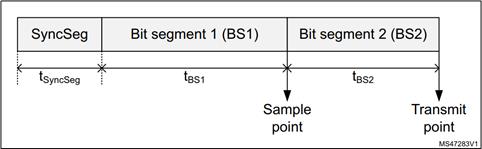
为了实现更好的稳定性,在满足指定波特率的情况下,让采样点的位置满足85%到90%是推荐的方式。主要用到HAL库的如下两个成员:
hfdcan2.Init.NominalTimeSeg1
hfdcan2.Init.NominalTimeSeg2
SyncSeg是固定1,也就是:
(SyncSeg + NominalTimeSeg1)/ (SyncSeg + NominalTimeSeg1 + NominalTimeSeg2)满足这个条件。
92.3.7 FDCAN的2560字RAM空间分配问题
关于FDCAN的2560字RAM空间在本教程第90章的第5小节有详细说明。本章配套程序将前1280字分配给FDCAN1,后1280字分配给FDCAN2。
92.3.8 FDCAN过滤器常用的范围过滤器和经典的位屏蔽过滤器
关于FDCAN的过滤器类型在本教程第90章的第6小节有详细说明,我们这里重点了解范围过滤器和经典位屏蔽过滤器。
- 范围过滤器
范围过滤器比较简单,也比较好理解,对应的HAL库配置代码如下:
sFilterConfig2.IdType = FDCAN_STANDARD_ID;
sFilterConfig2.FilterIndex = 0;
sFilterConfig2.FilterType = FDCAN_FILTER_RANGE;
sFilterConfig2.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
sFilterConfig2.FilterID1 = 0x111;
sFilterConfig2.FilterID2 = 0x555;
HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig2);
FilterType类型配置为FDCAN_FILTER_RANGE表示范围过滤器。
FilterID1 = 0x111和FilterID2 = 0x555表示仅接收 ≥0x111且 ≤ 0x555的ID。
- 经典的位屏蔽过滤
对应的HAL库配置代码如下:
sFilterConfig2.IdType = FDCAN_STANDARD_ID;
sFilterConfig2.FilterIndex = 0;
sFilterConfig2.FilterType = FDCAN_FILTER_MASK;
sFilterConfig2.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
sFilterConfig2.FilterID1 = 0x222;
sFilterConfig2.FilterID2 = 0x7FF;
HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig2);
FilterType类型配置为FDCAN_FILTER_MASK表示经典的位屏蔽过滤。
FilterID1 = filter 表示ID。
FilterID2 = mask 表示ID屏蔽位,mask每个bit含义:
0: 表示FilterID1相应bit不关心,该位不用于比较。
1: 表示FilterID1相应bit必须匹配,即接收到的ID位必须与FilterID1的相应位一致。
我们这里FilterID1 = 0x222,FilterID2 = 0x7FF 表示仅接收ID为0x222的FDCAN帧。
92.4 FDCAN驱动代码实现
这里以FDCAN1为例进行说明,FDCAN2的驱动程序在本章配套例子里面也提供了。
92.4.1 FDCAN配置
代码里面对每个成员都进行了详细注释说明:
/*
*********************************************************************************************************
* 函 数 名: bsp_InitCan1
* 功能说明: 初始CAN1
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_InitCan1(void)
{
/* 位时间特性配置
Bit time parameter | Nominal | Data
---------------------------|--------------|----------------
fdcan_ker_ck | 20 MHz | 20 MHz
Time_quantum (tq) | 50 ns | 50 ns
Synchronization_segment | 1 tq | 1 tq
Propagation_segment | 23 tq | 1 tq
Phase_segment_1 | 8 tq | 4 tq
Phase_segment_2 | 8 tq | 4 tq
Synchronization_Jump_width | 8 tq | 4 tq
Bit_length | 40 tq = 2us | 10 tq = 0.5us
Bit_rate | 0.5 MBit/s | 2 MBit/s
*/
hfdcan1.Instance = FDCAN1; /* 配置FDCAN1 */
hfdcan1.Init.FrameFormat = FDCAN_FRAME_FD_BRS; /* 配置使用FDCAN可变波特率 */
hfdcan1.Init.Mode = FDCAN_MODE_NORMAL; /* 配置使用正常模式 */
hfdcan1.Init.AutoRetransmission = ENABLE; /*使能自动重发 */
hfdcan1.Init.TransmitPause = DISABLE; /* 配置禁止传输暂停特性 */
hfdcan1.Init.ProtocolException = ENABLE; /* 协议异常处理使能 */
/*
配置仲裁阶段波特率
CAN时钟20MHz时,仲裁阶段的波特率就是
CAN FD Freq / (Sync_Seg + Pro_Seg + Phase_Seg1 + Phase_Seg2) = 20MHz / (1+0x1F + 8) = 0.5Mbps
其中Sync_Seg是固定值 = 1 , Pro_Seg + Phase_Seg1 = NominalTimeSeg1, Phase_Seg2 = NominalTimeSeg2
*/
/* CAN时钟分配设置,一般设置为1即可,全部由PLL配置好,tq = NominalPrescaler x (1/ fdcan_ker_ck) */
hfdcan1.Init.NominalPrescaler = 0x01;
/* 用于动态调节 Phase_Seg1和 Phase_Seg1,所以不可以比Phase_Seg1和 Phase_Seg1大 */
hfdcan1.Init.NominalSyncJumpWidth = 0x08;
/* 特别注意这里的Seg1,这里是两个参数之和,对应位时间特性图的 Pro_Seg + Phase_Seg1 */
hfdcan1.Init.NominalTimeSeg1 = 0x1F;
/* 对应位时间特性图的 Phase_Seg2 */
hfdcan1.Init.NominalTimeSeg2 = 0x08;
/*
配置数据阶段波特率
CAN时钟20MHz时,数据阶段的波特率就是
CAN FD Freq / (Sync_Seg + Pro_Seg + Phase_Seg1 + Phase_Seg2) = 20MHz / (1+5+ 4) = 2Mbps
其中Sync_Seg是固定值 = 1 , Pro_Seg + Phase_Seg1 = DataTimeSeg1, Phase_Seg2 = DataTimeSeg2
*/
/* CAN时钟分配设置,一般设置为1即可,全部由PLL配置好,tq = NominalPrescaler x (1/ fdcan_ker_ck),
范围1-32 */
hfdcan1.Init.DataPrescaler = 0x01;
/* 用于动态调节 Phase_Seg1和 Phase_Seg1,所以不可以比Phase_Seg1和 Phase_Seg1大,范围1-16 */
hfdcan1.Init.DataSyncJumpWidth = 0x04;
/* 特别注意这里的Seg1,这里是两个参数之和,对应位时间特性图的 Pro_Seg + Phase_Seg1,范围 */
hfdcan1.Init.DataTimeSeg1 = 0x05;
/* 对应位时间特性图的 Phase_Seg2 */
hfdcan1.Init.DataTimeSeg2 = 0x04;
hfdcan1.Init.MessageRAMOffset = 0; /* CAN1和CAN2共享2560个字, 这里CAN1分配前1280字 */
hfdcan1.Init.StdFiltersNbr = 1; /* 设置标准ID过滤器个数,范围0-128 */
hfdcan1.Init.ExtFiltersNbr = 0; /* 设置扩展ID过滤器个数,范围0-64 */
hfdcan1.Init.RxFifo0ElmtsNbr = 2; /* 设置Rx FIFO0的元素个数,范围0-64 */
/* 设置Rx FIFO0中每个元素大小,支持8,12,16,20,24,32,48或者64字节 */
hfdcan1.Init.RxFifo0ElmtSize = FDCAN_DATA_BYTES_8;
hfdcan1.Init.RxFifo1ElmtsNbr = 0; /* 设置Rx FIFO1的元素个数,范围0-64 */
/* 设置Rx FIFO1中每个元素大小,支持8,12,16,20,24,32,48或者64字节 */
hfdcan1.Init.RxFifo1ElmtSize = FDCAN_DATA_BYTES_8;
hfdcan1.Init.RxBuffersNbr = 0; /* 设置Rx Buffer个数,范围0-64 */
/* 设置Rx Buffer中每个元素大小,支持8,12,16,20,24,32,48或者64字节 */
hfdcan1.Init.RxBufferSize = 0;
hfdcan1.Init.TxEventsNbr = 0; /* 设置Tx Event FIFO中元素个数,范围0-32 */
hfdcan1.Init.TxBuffersNbr = 0; /* 设置Tx Buffer中元素个数,范围0-32 */
hfdcan1.Init.TxFifoQueueElmtsNbr = 2; /* 设置用于Tx FIFO/Queue的Tx Buffers个数。范围0到32 */
hfdcan1.Init.TxFifoQueueMode = FDCAN_TX_FIFO_OPERATION; /* 设置FIFO模式或者QUEUE队列模式 */
/* 设置Tx Element中的数据域大小,支持8,12,16,20,24,32,48或者64字节 */
hfdcan1.Init.TxElmtSize = FDCAN_DATA_BYTES_8;
HAL_FDCAN_Init(&hfdcan1);
/*
配置过滤器, 过滤器主要用于接收,这里采样屏蔽位模式。
FilterID1 = filter
FilterID2 = mask
FilterID2的mask每个bit含义
0: 不关心,该位不用于比较;
1: 必须匹配,接收到的ID必须与滤波器对应的ID位相一致。
举例说明:
FilterID1 = 0x111
FilterID2 = 0x7FF
表示仅接收ID为0x111的FDCAN帧。
*/
sFilterConfig1.IdType = FDCAN_STANDARD_ID; /* 设置标准ID或者扩展ID */
/* 用于过滤索引,如果是标准ID,范围0到127。如果是扩展ID,范围0到64 */
sFilterConfig1.FilterIndex = 0;
sFilterConfig1.FilterType = FDCAN_FILTER_MASK; /* 过滤器采样屏蔽位模式 */
sFilterConfig1.FilterConfig = FDCAN_FILTER_TO_RXFIFO0; /* 如果过滤匹配,将数据保存到Rx FIFO 0 */
sFilterConfig1.FilterID1 = 0x111; /* 屏蔽位模式下,FilterID1是消息ID */
sFilterConfig1.FilterID2 = 0x7FF; /* 屏蔽位模式下,FilterID2是消息屏蔽位 */
HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig1); /* 配置过滤器 */
/* 设置Rx FIFO0的wartermark为1 */
HAL_FDCAN_ConfigFifoWatermark(&hfdcan1, FDCAN_CFG_RX_FIFO0, 1);
/* 激活RX FIFO0的watermark通知中断,位开启Tx Buffer中断*/
HAL_FDCAN_ActivateNotification(&hfdcan1, FDCAN_IT_RX_FIFO0_WATERMARK, 0);
/* 启动FDCAN */
HAL_FDCAN_Start(&hfdcan1);
}
92.4.2 FDCAN的GPIO,NVIC等配置
主要配置了FDCAN的GPIO,GPIO时钟,FDCAN时钟和NVIC:
/*
*********************************************************************************************************
* 函 数 名: HAL_FDCAN_MspInit
* 功能说明: 配置CAN gpio
* 形 参: hfdcan
* 返 回 值: 无
*********************************************************************************************************
*/
void HAL_FDCAN_MspInit(FDCAN_HandleTypeDef* hfdcan)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
if (hfdcan == &hfdcan1)
{
/*##-1- 使能外设这个GPIO时钟 #################################*/
FDCAN1_TX_GPIO_CLK_ENABLE();
FDCAN1_RX_GPIO_CLK_ENABLE();
/* 选择PLL2Q作为FDCANx时钟 */
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_FDCAN;
PeriphClkInitStruct.PLL2.PLL2M = 5;
PeriphClkInitStruct.PLL2.PLL2N = 80;
PeriphClkInitStruct.PLL2.PLL2P = 2;
PeriphClkInitStruct.PLL2.PLL2Q = 20;
PeriphClkInitStruct.PLL2.PLL2R = 2;
PeriphClkInitStruct.PLL2.PLL2RGE = RCC_PLL2VCIRANGE_2;
PeriphClkInitStruct.PLL2.PLL2VCOSEL = RCC_PLL2VCOWIDE;
PeriphClkInitStruct.PLL2.PLL2FRACN = 0;
PeriphClkInitStruct.FdcanClockSelection = RCC_FDCANCLKSOURCE_PLL2;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler(__FILE__, __LINE__);
}
__HAL_RCC_FDCAN_CLK_ENABLE();
GPIO_InitStruct.Pin = FDCAN1_TX_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = FDCAN1_TX_AF;
HAL_GPIO_Init(FDCAN1_TX_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = FDCAN1_RX_PIN;
GPIO_InitStruct.Alternate = FDCAN1_RX_AF;
HAL_GPIO_Init(FDCAN1_RX_GPIO_PORT, &GPIO_InitStruct);
HAL_NVIC_SetPriority(FDCAN1_IT0_IRQn, 2, 0);
HAL_NVIC_SetPriority(FDCAN1_IT1_IRQn, 2, 0);
HAL_NVIC_SetPriority(FDCAN_CAL_IRQn, 2, 0);
HAL_NVIC_EnableIRQ(FDCAN1_IT0_IRQn);
HAL_NVIC_EnableIRQ(FDCAN1_IT1_IRQn);
HAL_NVIC_EnableIRQ(FDCAN_CAL_IRQn);
}
}
92.4.3 FDCAN的数据发送
FDCAN每帧数据最大64字节:
/*
*********************************************************************************************************
* 函 数 名: can1_SendPacket
* 功能说明: 发送一包数据
* 形 参:_DataBuf 数据缓冲区
* _Len 数据长度, 支持8,12,16,20,24,32,48或者64字节
* 返 回 值: 无
*********************************************************************************************************
*/
void can1_SendPacket(uint8_t *_DataBuf, uint8_t _Len)
{
FDCAN_TxHeaderTypeDef TxHeader = {0};
/* 配置发送参数 */
TxHeader.Identifier = 0x222; /* 设置接收帧消息的ID */
TxHeader.IdType = FDCAN_STANDARD_ID; /* 标准ID */
TxHeader.TxFrameType = FDCAN_DATA_FRAME; /* 数据帧 */
TxHeader.DataLength = (uint32_t)_Len << 16; /* 发送数据长度 */
TxHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE; /* 设置错误状态指示 */
TxHeader.BitRateSwitch = FDCAN_BRS_ON; /* 开启可变波特率 */
TxHeader.FDFormat = FDCAN_FD_CAN; /* FDCAN格式 */
TxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;/* 用于发送事件FIFO控制, 不存储 */
TxHeader.MessageMarker = 0; /* 用于复制到TX EVENT FIFO的消息Maker来识别消息状态,范围0到0xFF */
/* 添加数据到TX FIFO */
HAL_FDCAN_AddMessageToTxFifoQ(&hfdcan1, &TxHeader, _DataBuf);
}
这里特别注意两点:
- 发送的数据幅值给DataLength,需要右移16bit。
- 要发送的数据会被复制到TX FIFO硬件缓存中。
92.4.4 FDCAN的中断服务程序处理
这里FDCAN中断主要用于数据接收:
/*
*********************************************************************************************************
* 函 数 名: FDCAN1_IT0_IRQHandler
* 功能说明: CAN中断服务程序
* 形 参: hfdcan
* 返 回 值: 无
*********************************************************************************************************
*/
void FDCAN1_IT0_IRQHandler(void)
{
HAL_FDCAN_IRQHandler(&hfdcan1);
}
void FDCAN1_IT1_IRQHandler(void)
{
HAL_FDCAN_IRQHandler(&hfdcan1);
}
void FDCAN_CAL_IRQHandler(void)
{
HAL_FDCAN_IRQHandler(&hfdcan1);
}
/*
*********************************************************************************************************
* 函 数 名: HAL_FDCAN_RxFifo0Callback
* 功能说明: CAN中断服务程序-回调函数
* 形 参: hfdcan
* 返 回 值: 无
*********************************************************************************************************
*/
void HAL_FDCAN_RxFifo0Callback(FDCAN_HandleTypeDef *hfdcan, uint32_t RxFifo0ITs)
{
if (hfdcan == &hfdcan1)
{
if ((RxFifo0ITs & FDCAN_IT_RX_FIFO0_WATERMARK) != RESET)
{
/* 从RX FIFO0读取数据 */
HAL_FDCAN_GetRxMessage(hfdcan, FDCAN_RX_FIFO0, &g_Can1RxHeader, g_Can1RxData);
/* 激活Rx FIFO0 watermark notification */
HAL_FDCAN_ActivateNotification(hfdcan, FDCAN_IT_RX_FIFO0_WATERMARK, 0);
if (g_Can1RxHeader.Identifier == 0x111 && g_Can1RxHeader.IdType == FDCAN_STANDARD_ID)
{
bsp_PutMsg(MSG_CAN1_RX, 0); /* 发消息收到数据包,结果在g_Can1RxHeader, g_Can1RxData */
}
}
}
}
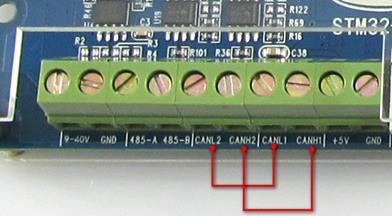
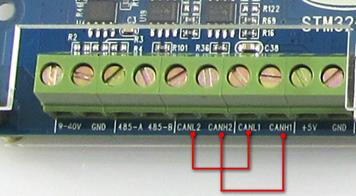
92.5 双FDCAN测试的接线和跳线帽说明
大家可以直接使用板载的两个FDCAN进行通信测试。跳线帽设置如下:

双CAN FD接线:
92.6 开发板和H7-TOOL的FDCAN助手测试
H7-TOOL的CAN/CANFD助手支持以太网,USB和WiFi三种通信方式。大家可以用使用本章配套的双FDCAN例子与H7-TOOL的FDCAN助手进行通信。
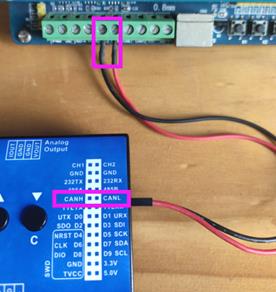
92.6.1 接线说明
H7-TOOL和STM32H7的FDCAN2进行通信,注意是CANH接CANH, CANL接CANL
92.6.2 启动H7-TOOL上位机
打开最新版的H7-TOOL上位机,使用USB,以太网或者WiFi方式均支持。选择左侧的CAN助手 -> 启动CAN助手:
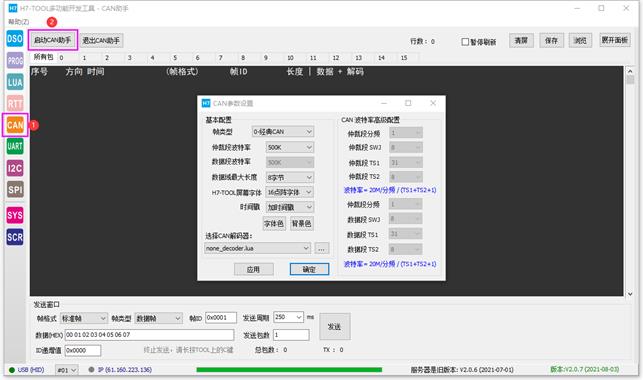
参数介绍:
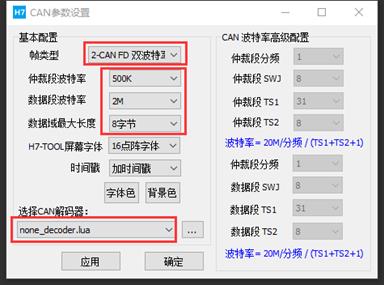
(1)帧类型 :0 - 经典CAN,最大收发8字节
1 - CAN FD , 仲裁段和数据点波特率相同,最大收发64字节
2 - CAN FD 双波特率,仲裁段和数据点波特率不同,最大收发64字节
(2)仲裁段和数据段波特率 :除了提供常用的波特率,还提供了用户可自定义配置模式,需要用户选择如下选项,这样就可以配置右侧的“CAN波特率高级配置”

我们这里选择CAN FD双波特率,仲裁段设置为500Kbps,数据段设置为2Mbps,最大数据设置为8字节, CAN解码器设置为none_decoder.lua
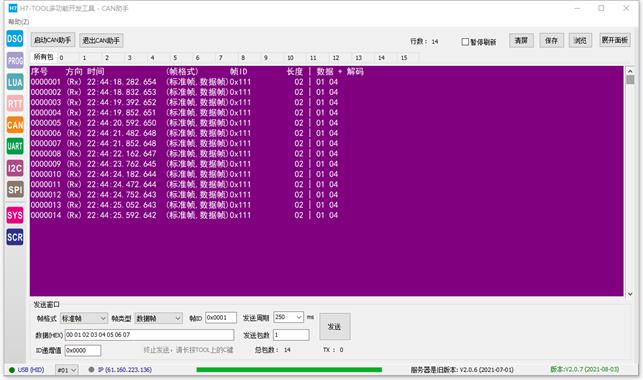
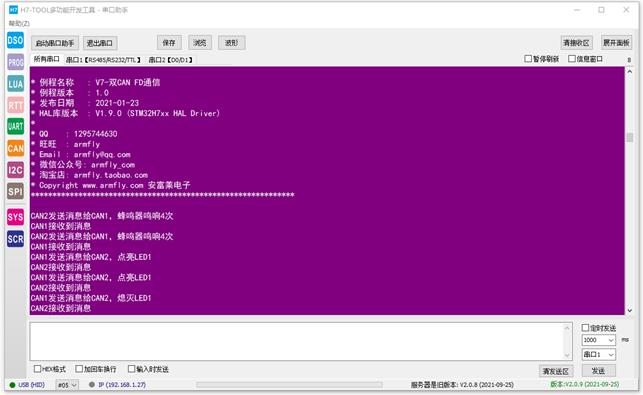
92.6.3 H7-TOOL的FDCAN接收数据测试
第2步设置完毕参数后,按下几次STM32H7板子的 K1, 可以看到H7-TOOL上位机接收到了数据:
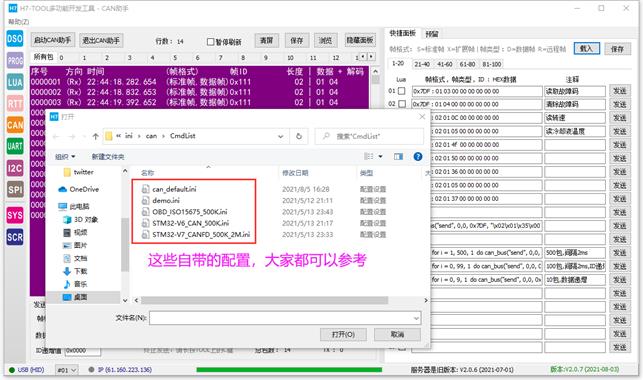
92.6.4 H7-TOOL的FDCAN发送数据测试
如果有多种发送格式,用户可以在快捷面板里面发送,这个面板也支持用户加载专门的配置文件,不用每次都设置。
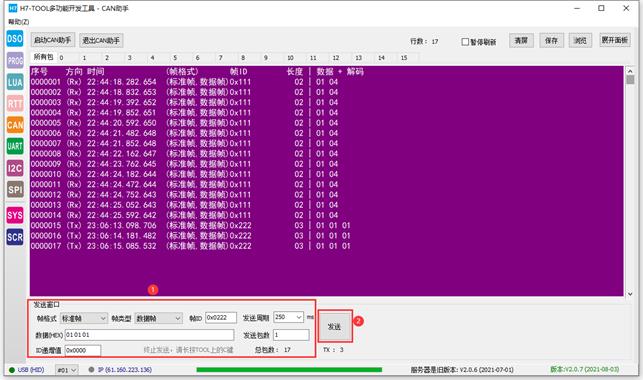
如下的配置,点击发送,可以控制STM32H7板子的LED1点亮:
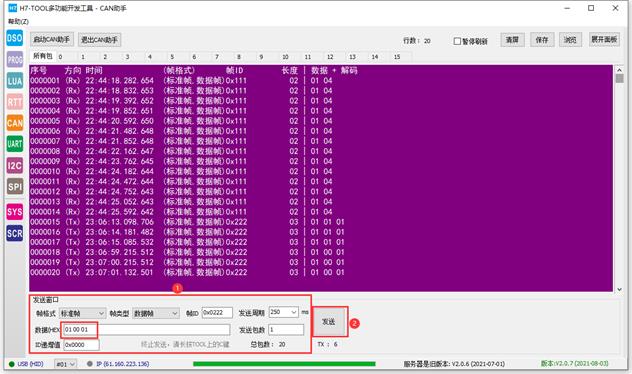
如下的配置,点击发送,可以控制STM32H7板子的LED1熄灭:
92.7 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:
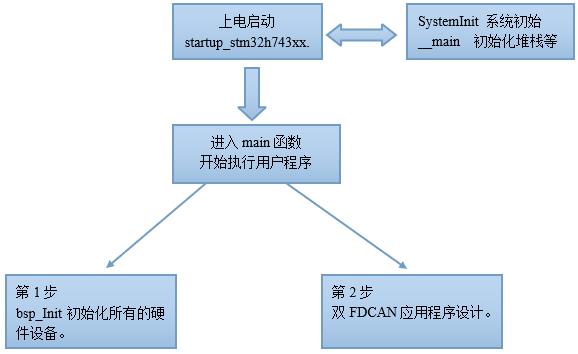
第1阶段,上电启动阶段:
- 这部分在第14章进行了详细说明。
第2阶段,进入main函数:
- 第1步,硬件初始化,主要是MPU,Cache,HAL库,系统时钟,滴答定时器,LED和串口。
- 第2步,FDCAN应用程序设计部分。
92.8 实验例程说明(MDK)
配套例子:
V7-069_双CAN FD之间通信
实验目的:
- 学习双CAN FD的实现。
实验内容:
- K1按键按下,CAN2发送消息给CAN1,蜂鸣器鸣响4次。
- K2按键按下,CAN1发送消息给CAN2,点亮LED1。
- K2按键按下,CAN1发送消息给CAN2,熄灭LED1。
注意事项:
- 接线方式是CAN1的CANL1和CAN2的CANL2连接,CAN1的CANH2和CAN2的CANH2连接,具体接线看本工程Doc文件中的截图。
- 启用CAN1,需要将V7主板上的J12跳线帽短接PA11,J13跳线帽短接PA12。
- 启用CNA2,硬件无需跳线,要禁止使用以太网功能(有引脚复用)。

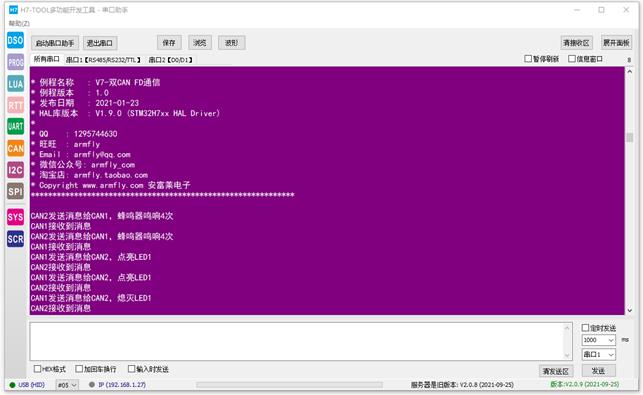
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
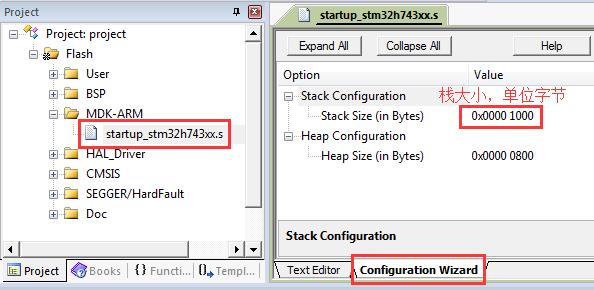
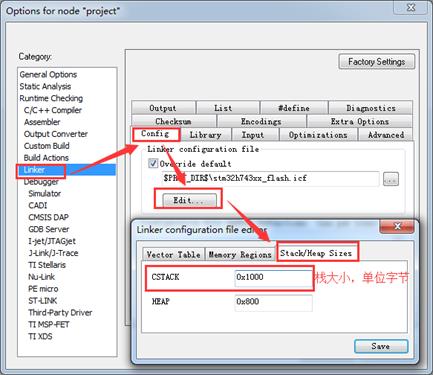
系统栈大小分配:
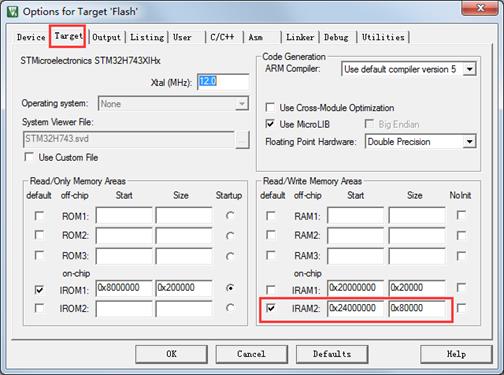
RAM空间用的AXI SRAM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/*
*********************************************************************************************************
* 函 数 名: bsp_Init
* 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_Init(void)
{
/* 配置MPU */
MPU_Config();
/* 使能L1 Cache */
CPU_CACHE_Enable();
/*
STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- 设置NVIV优先级分组为4。
*/
HAL_Init();
/*
配置系统时钟到400MHz
- 切换使用HSE。
- 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
*/
SystemClock_Config();
/*
Event Recorder:
- 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
*/
#if Enable_EventRecorder == 1
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
#endif
bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
bsp_InitTimer(); /* 初始化滴答定时器 */
bsp_InitUart(); /* 初始化串口 */
bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
bsp_InitLed(); /* 初始化LED */
}
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区和FMC的扩展IO区。
/*
*********************************************************************************************************
* 函 数 名: MPU_Config
* 功能说明: 配置MPU
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MPU_Config( void )
{
MPU_Region_InitTypeDef MPU_InitStruct;
/* 禁止 MPU */
HAL_MPU_Disable();
#if 0
/* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
#else
/* 当前是采用下面的配置 */
/* 配置AXI SRAM的MPU属性为NORMAL, NO Read allocate,NO Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
#endif
/* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x60000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER1;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/*使能 MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/*
*********************************************************************************************************
* 函 数 名: CPU_CACHE_Enable
* 功能说明: 使能L1 Cache
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void CPU_CACHE_Enable(void)
{
/* 使能 I-Cache */
SCB_EnableICache();
/* 使能 D-Cache */
SCB_EnableDCache();
}
主功能:
主程序实现如下操作:
- 上电启动了一个软件定时器,每100ms翻转一次LED2。
- K1按键按下,CAN2发送消息给CAN1,蜂鸣器鸣响4次。
- K2按键按下,CAN1发送消息给CAN2,点亮LED1。
- K2按键按下,CAN1发送消息给CAN2,熄灭LED1。
/*
*********************************************************************************************************
* 函 数 名: DemoCANFD
* 功能说明: CAN测试
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void DemoCANFD(void)
{
uint8_t ucKeyCode; /* 按键代码 */
can_Init(); /* 初始化CAN */
bsp_StartAutoTimer(0, 500); /* 启动1个500ms的自动重装的定时器 */
while (1)
{
{
MSG_T msg;
if (bsp_GetMsg(&msg))
{
switch (msg.MsgCode)
{
case MSG_CAN1_RX: /* 接收到CAN设备的应答 */
printf("CAN1接收到消息\\r\\n");
can1_Analyze();
break;
case MSG_CAN2_RX: /* 接收到CAN设备的应答 */
printf("CAN2接收到消息\\r\\n");
can2_Analyze();
break;
}
}
}
/* 判断定时器超时时间 */
if (bsp_CheckTimer(0))
{
/* 每隔500ms 进来一次 */
bsp_LedToggle(2);
}
/* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
if (ucKeyCode != KEY_NONE)
{
switch (ucKeyCode)
{
case KEY_DOWN_K1: /* K1键按下 */
printf("CAN2发送消息给CAN1,蜂鸣器鸣响4次\\r\\n");
can_BeepCtrl(1, 4);
break;
case KEY_DOWN_K2: /* K2键按下 */
printf("CAN1发送消息给CAN2,点亮LED1\\r\\n");
can_LedOn(1, 1);
break;
case KEY_DOWN_K3: /* K3键按下 */
printf("CAN1发送消息给CAN2,熄灭LED1\\r\\n");
can_LedOff(1, 1);
break;
default:
/* 其它的键值不处理 */
break;
}
}
}
}
92.9 实验例程说明(IAR)
配套例子:
V7-069_双CAN FD之间通信
实验目的:
- 学习双CAN FD的实现。
实验内容:
- K1按键按下,CAN2发送消息给CAN1,蜂鸣器鸣响4次。
- K2按键按下,CAN1发送消息给CAN2,点亮LED1。
- K2按键按下,CAN1发送消息给CAN2,熄灭LED1。
注意事项:
- 接线方式是CAN1的CANL1和CAN2的CANL2连接,CAN1的CANH2和CAN2的CANH2连接,具体接线看本工程Doc文件中的截图。
- 启用CAN1,需要将V7主板上的J12跳线帽短接PA11,J13跳线帽短接PA12。
- 启用CNA2,硬件无需跳线,要禁止使用以太网功能(有引脚复用)。

上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
系统栈大小分配:
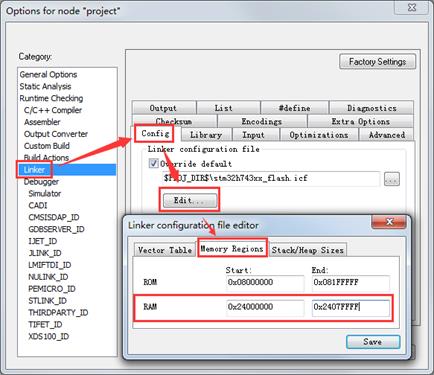
RAM空间用的AXI SRAM:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/*
*********************************************************************************************************
* 函 数 名: bsp_Init
* 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次
* 形 参:无
* 返 回 值: 无
*********************************************************************************************************
*/
void bsp_Init(void)
{
/* 配置MPU */
MPU_Config();
/* 使能L1 Cache */
CPU_CACHE_Enable();
/*
STM32H7xx HAL 库初始化,此时系统用的还是H7自带的64MHz,HSI时钟:
- 调用函数HAL_InitTick,初始化滴答时钟中断1ms。
- 设置NVIV优先级分组为4。
*/
HAL_Init();
/*
配置系统时钟到400MHz
- 切换使用HSE。
- 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。
*/
SystemClock_Config();
/*
Event Recorder:
- 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。
- 默认不开启,如果要使能此选项,务必看V7开发板用户手册第xx章
*/
#if Enable_EventRecorder == 1
/* 初始化EventRecorder并开启 */
EventRecorderInitialize(EventRecordAll, 1U);
EventRecorderStart();
#endif
bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */
bsp_InitTimer(); /* 初始化滴答定时器 */
bsp_InitUart(); /* 初始化串口 */
bsp_InitExtIO(); /* 初始化FMC总线74HC574扩展IO. 必须在 bsp_InitLed()前执行 */
bsp_InitLed(); /* 初始化LED */
}
MPU配置和Cache配置:
数据Cache和指令Cache都开启。配置了AXI SRAM区和FMC的扩展IO区。
/*
*********************************************************************************************************
* 函 数 名: MPU_Config
* 功能说明: 配置MPU
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void MPU_Config( void )
{
MPU_Region_InitTypeDef MPU_InitStruct;
/* 禁止 MPU */
HAL_MPU_Disable();
#if 0
/* 配置AXI SRAM的MPU属性为Write back, Read allocate,Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
#else
/* 当前是采用下面的配置 */
/* 配置AXI SRAM的MPU属性为NORMAL, NO Read allocate,NO Write allocate */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x24000000;
MPU_InitStruct.Size = MPU_REGION_SIZE_512KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_NOT_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER0;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL1;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
#endif
/* 配置FMC扩展IO的MPU属性为Device或者Strongly Ordered */
MPU_InitStruct.Enable = MPU_REGION_ENABLE;
MPU_InitStruct.BaseAddress = 0x60000000;
MPU_InitStruct.Size = ARM_MPU_REGION_SIZE_64KB;
MPU_InitStruct.AccessPermission = MPU_REGION_FULL_ACCESS;
MPU_InitStruct.IsBufferable = MPU_ACCESS_BUFFERABLE;
MPU_InitStruct.IsCacheable = MPU_ACCESS_NOT_CACHEABLE;
MPU_InitStruct.IsShareable = MPU_ACCESS_NOT_SHAREABLE;
MPU_InitStruct.Number = MPU_REGION_NUMBER1;
MPU_InitStruct.TypeExtField = MPU_TEX_LEVEL0;
MPU_InitStruct.SubRegionDisable = 0x00;
MPU_InitStruct.DisableExec = MPU_INSTRUCTION_ACCESS_ENABLE;
HAL_MPU_ConfigRegion(&MPU_InitStruct);
/*使能 MPU */
HAL_MPU_Enable(MPU_PRIVILEGED_DEFAULT);
}
/*
*********************************************************************************************************
* 函 数 名: CPU_CACHE_Enable
* 功能说明: 使能L1 Cache
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
static void CPU_CACHE_Enable(void)
{
/* 使能 I-Cache */
SCB_EnableICache();
/* 使能 D-Cache */
SCB_EnableDCache();
}
主功能:
主程序实现如下操作:
- 上电启动了一个软件定时器,每100ms翻转一次LED2。
- K1按键按下,CAN2发送消息给CAN1,蜂鸣器鸣响4次。
- K2按键按下,CAN1发送消息给CAN2,点亮LED1。
- K2按键按下,CAN1发送消息给CAN2,熄灭LED1。
/*
*********************************************************************************************************
* 函 数 名: DemoCANFD
* 功能说明: CAN测试
* 形 参: 无
* 返 回 值: 无
*********************************************************************************************************
*/
void DemoCANFD(void)
{
uint8_t ucKeyCode; /* 按键代码 */
can_Init(); /* 初始化CAN */
bsp_StartAutoTimer(0, 500); /* 启动1个500ms的自动重装的定时器 */
while (1)
{
{
MSG_T msg;
if (bsp_GetMsg(&msg))
{
switch (msg.MsgCode)
{
case MSG_CAN1_RX: /* 接收到CAN设备的应答 */
printf("CAN1接收到消息\\r\\n");
can1_Analyze();
break;
case MSG_CAN2_RX: /* 接收到CAN设备的应答 */
printf("CAN2接收到消息\\r\\n");
can2_Analyze();
break;
}
}
}
/* 判断定时器超时时间 */
if (bsp_CheckTimer(0))
{
/* 每隔500ms 进来一次 */
bsp_LedToggle(2);
}
/* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */
ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */
if (ucKeyCode != KEY_NONE)
{
switch (ucKeyCode)
{
case KEY_DOWN_K1: /* K1键按下 */
printf("CAN2发送消息给CAN1,蜂鸣器鸣响4次\\r\\n");
can_BeepCtrl(1, 4);
break;
case KEY_DOWN_K2: /* K2键按下 */
printf("CAN1发送消息给CAN2,点亮LED1\\r\\n");
can_LedOn(1, 1);
break;
case KEY_DOWN_K3: /* K3键按下 */
printf("CAN1发送消息给CAN2,熄灭LED1\\r\\n");
can_LedOff(1, 1);
break;
default:
/* 其它的键值不处理 */
break;
}
}
}
}
92.10 总结
本章节就为大家讲解这么多,FDCAN涉及到的知识点非常多,建议先将例子熟练运用,然后再深入了解。
以上是关于STM32H7教程第92章 STM32H7的FDCAN总线应用之双FDCAN实现(支持经典CAN)的主要内容,如果未能解决你的问题,请参考以下文章
STM32H7教程第39章 STM32H7的DMAMUX基础知识(重要)
STM32H7教程第49章 STM32H7的FMC总线应用之SDRAM
STM32H7的DSP教程第33章 STM32H7不限制点数FFT实现
STM32H7教程第89章 STM32H7的CAN FD总线基础之前世今生