ROS2机器人实验报告提示02➡沼泽⬅
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS2机器人实验报告提示02➡沼泽⬅相关的知识,希望对你有一定的参考价值。
推荐只用远程连接,可以一边做实验一边写报告。镜像内置功能,尽情玩耍。

输入用户名和密码即可。
颜色属性(color profile)这个选项请注意,不用输密码,一路取消……镜像不能保存在本体,但可以保存到其他盘。
实验二主要是功能包使用,这里需要注意系统中的功能包不可修改,但是自己创建或者下载源码的功能包可以定制,然后编译生成需要的功能。
使用turtlesim包。

请注意,doc是文档目录,code是代码目录。在code中有turtlesim源码。
进入到ros2_ws文件夹下,单击鼠标右键,打开终端!
注意路径zhangrelay@cslg:~/code/ros2_ws$
输入如下命令:
- ros2 pkg prefix turtlesim
显示如下:
/opt/ros/galactic
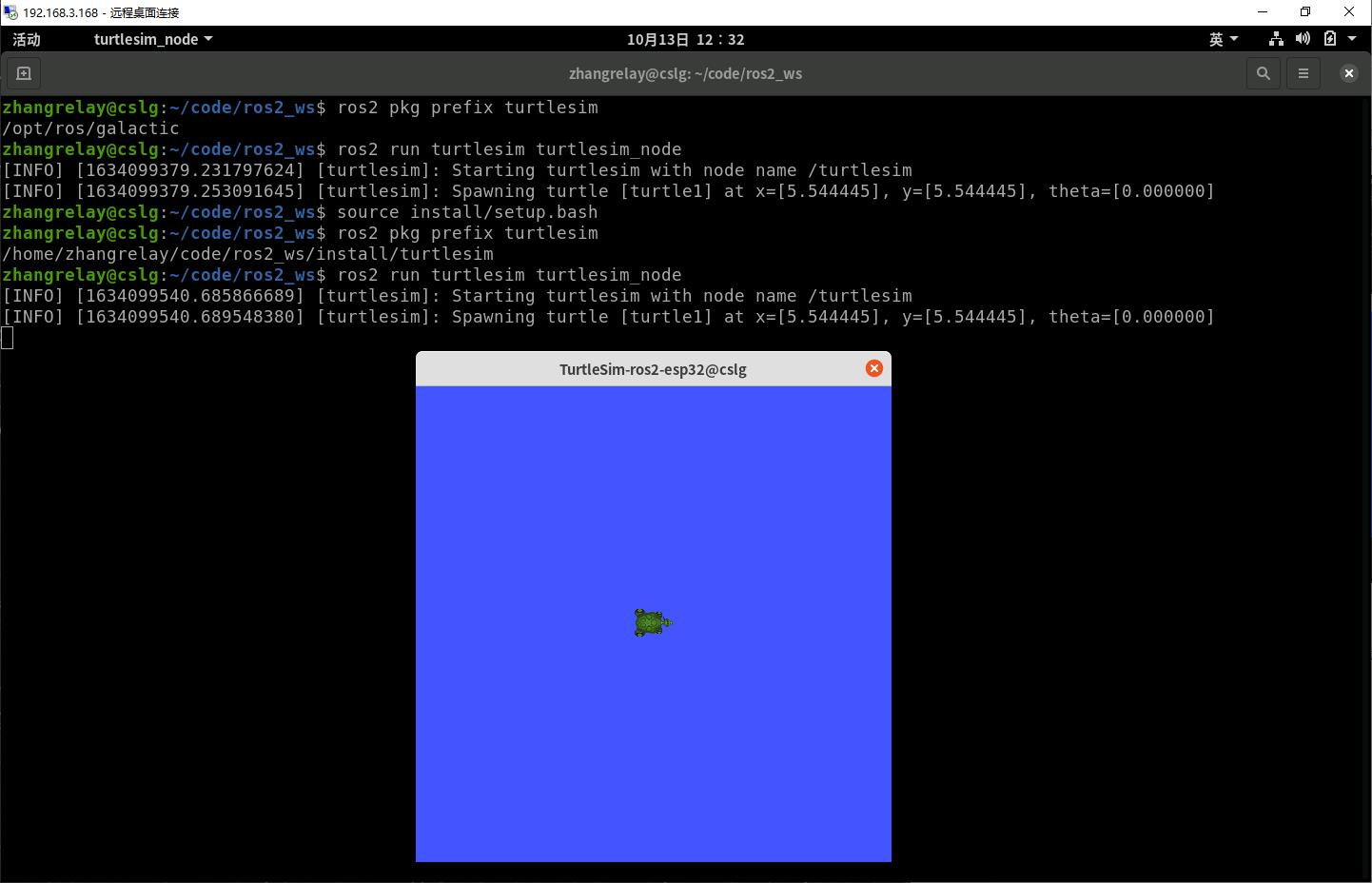
这是使用sudo apt install 安装后的默认功能包位置。输入如下命令看一看效果:
- ros2 run turtlesim turtlesim_node

注意标题栏,后续要修改为学号!
导入自己的功能包(一定要在对应功能包目录下操作):
- source install/setup.bash
重复上述指令:
- ros2 pkg prefix turtlesim
- ros2 run turtlesim turtlesim_node
查看变化!
功能包源代码在src文件夹下:
修改如下代码:
#define DEFAULT_BG_R 0x45
#define DEFAULT_BG_G 0x56
#define DEFAULT_BG_B 0xff
namespace turtlesim
{
TurtleFrame::TurtleFrame(rclcpp::Node::SharedPtr& node_handle, QWidget* parent, Qt::WindowFlags f)
: QFrame(parent, f)
, path_image_(500, 500, QImage::Format_ARGB32)
, path_painter_(&path_image_)
, frame_count_(0)
, id_counter_(0)
{
setFixedSize(500, 500);
setWindowTitle("TurtleSim-ros2-esp32@cslg-您的学号");鼓励修改窗口大小,背景色等,直播课已经讲过了,自行实验。
修改后保存!!!但是镜像会还原,请将这个目录复制到windows盘的合适位置然后编译!
同样截图和详细命令文档也保存在windows系统合适位置即可。
然后重新编译!
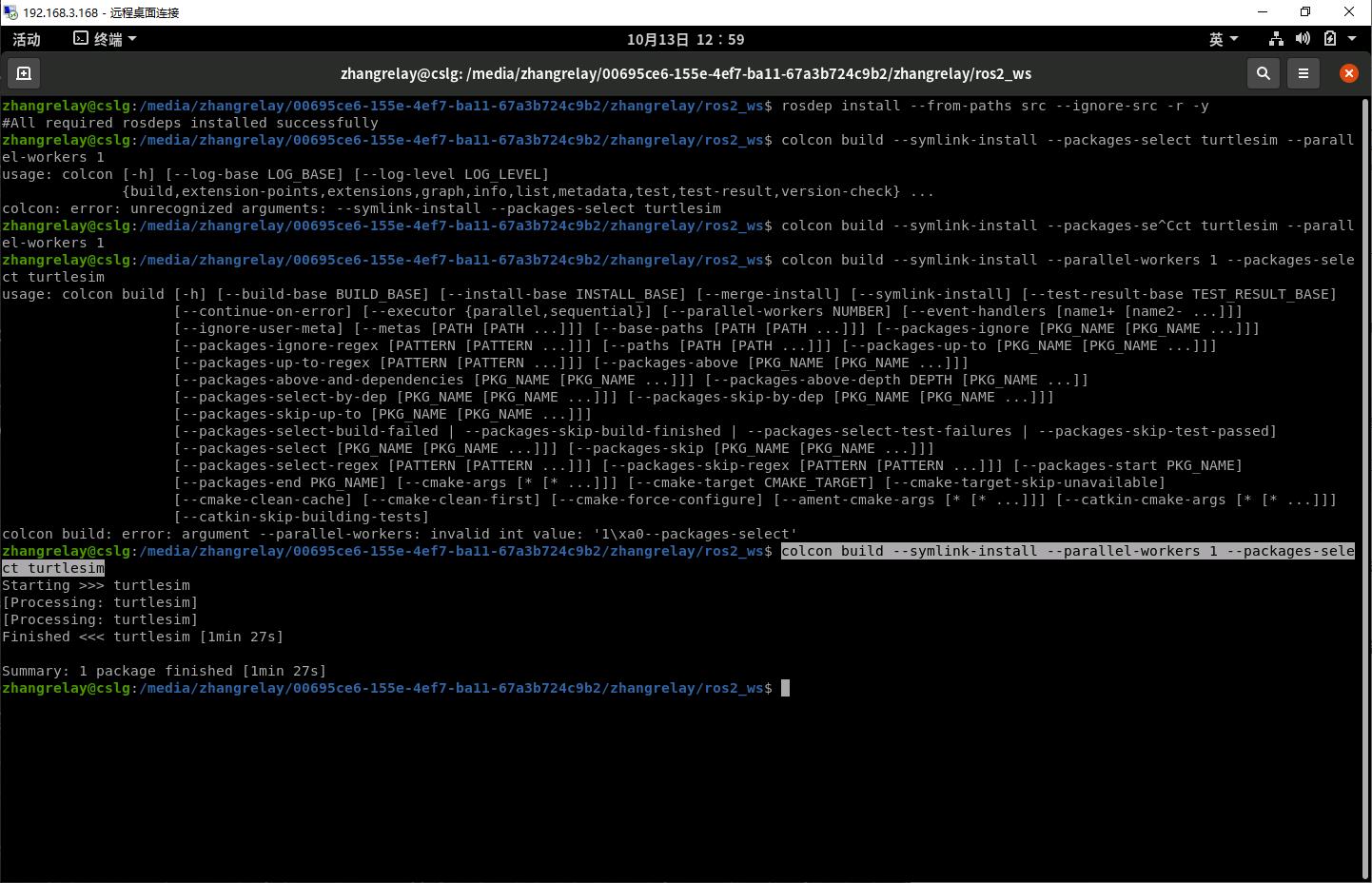
缺失功能包自动补装:
- rosdep install --from-paths src --ignore-src -r -y
如果出现如下提示:
#All required rosdeps installed successfully
说明一切准备就绪,开始编译吧。
使用单线程编译,否则会出现死机等问题哦!!!
- colcon build --symlink-install
--packages-select 功能包选择
--parallel-workers 编译线程数
具体参数查看colcon官网。
如果只编译turtlesim,并使用单线程,命令如下:
- colcon build --symlink-install --parallel-workers 1 --packages-select turtlesim
注意参数顺序和不要出现中文空格。

导入环境,然后运行如下命令:
- source install/setup.bash
- ros2 run turtlesim turtlesim_node
- ros2 run turtlesim turtle_teleop_key
- ros2 node list
- ros2 node info /turtlesim
- rqt
查看效果!

思考题及答案链接:
ROS2趣味题库之turtlesim魔幻步伐(轨迹类题型)_zhangrelay的专栏-CSDN博客
实验1和实验2参考文档在镜像中位置如下:

以上是关于ROS2机器人实验报告提示02➡沼泽⬅的主要内容,如果未能解决你的问题,请参考以下文章