STM32的USART串口通讯程序
Posted big_west
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32的USART串口通讯程序相关的知识,希望对你有一定的参考价值。
文章目录
一、了解串口通信及准备工作
1.串口通信简介
代码如下(示例):
串行通讯是指设备之间通过少量数据信号线,地线以及控制信号线,按数据位形式一位一位地传输数据的通讯方式。
分类
单工:数据传输只支持数据在一个方向上传输。
半双工:允许数据在两个方向上传输。但同一时刻只允许数据在一个方向上传输,它实际上是一种能够切换方向的单工通信,不需要独立的接收端和发送端,两者可以合并使用一个端口。
全双工:允许数据同时在两个方向上传输。因此全双工通信是两个单工通信方式的结合,需要独立的接收端和发送端。
2.STM32 的 USART 简介
通用同步异步收发器(Universal Synchronous Asynchronous Receiver and Transmitter)是一个串行通信设备,可以灵活地与外部设备进行全双工数据交换。有别于 USART 还有一个UART(Universal Asynchronous Receiver and Transmitter),它是在 USART 基础上裁剪掉了同步通信功能,只有异步通信。简单区分同步和异步就是看通信时需不需要对外提供时钟输
出,我们平时用的串口通信基本都是 UART。
说明:
任何USART双向通信至少需要两个引脚:接收数据输入(RX)和发送数据输出(TX)。
RX:接收数据串行输入。通过过采样技术来区别数据和噪音,从而恢复数据。
TX:发送数据串行输出。当发送器被禁止时,输出引脚恢复到它的I/O端口配置。当发送器被激活且不发送数据时,TX引脚处于高电平。在单线和智能卡模式里,此I/O口被同时用于数据的发送和接收。
SCLK:发送器时钟输出。此引脚输出用于同步传输的时钟, (在Start位和Stop位上没有时钟脉冲,软件可选地,可以在最后一个数据位送出一个时钟脉冲)。数据可以在RX上同步被接收。这可以用来控制带有移位寄存器的外部设备(例如LCD驱动器)。时钟相位和极性都是软件可编程的。在智能卡模式里,CK可以为智能卡提供时钟。
在IrDA模式里需要下列引脚:
IrDA_RDI: IrDA模式下的数据输入。
IrDA_TDO: IrDA模式下的数据输出。
在硬件流控模式里需要下列引脚:
nCTS: 清除发送,若是高电平,在当前数据传输结束时阻断下一次的数据发送。
nRTS: 发送请求,若是低电平,表明USART准备好接收数据
STM32F103VET6 系统控制器有三个 USART 和两个 UART,UART(通用异步收发器)只是异步传输功能,所以没有 SCLK、nCTS 和 nRTS 功能引脚。
二、程序编写输出Hello Windows
1.实验要求
- 设置波特率为115200,1位停止位,无校验位。
- STM32给上位机(win10)连续发送hello Windows,上位机接收程序使用“串口调试助手“。
- 当上位机给stm32发送Stop,stm32后,stm32停止发送。
2.实验原理 - 串口接收
由于前面已经配置好了stm32的串口1中断,因此当上位机给stm32发送数据时就会触发该中断进入中断处理函数USART1_IRQHandler()接收数据并保存到接受数据缓冲区。 - 串口发送
当串口接收完数据并存储到接受数据缓冲区后,主程序就将该缓冲区中的数据按位放到发送数据缓冲区中并发送出去,由上位机的串口调试助手显示stm32发送出来的数据。
创建新项目
选择对应芯片
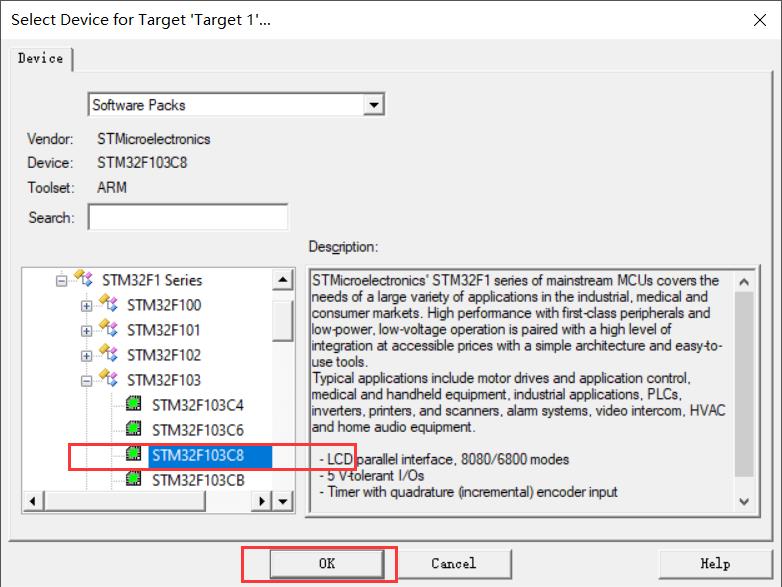
在这里不要勾选 直接OK

在文件夹下新建hello Windows.s文件:
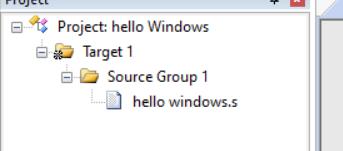
编写代码:
;RCC寄存器地址映像
RCC_BASE EQU 0x40021000
RCC_CR EQU (RCC_BASE + 0x00)
RCC_CFGR EQU (RCC_BASE + 0x04)
RCC_CIR EQU (RCC_BASE + 0x08)
RCC_APB2RSTR EQU (RCC_BASE + 0x0C)
RCC_APB1RSTR EQU (RCC_BASE + 0x10)
RCC_AHBENR EQU (RCC_BASE + 0x14)
RCC_APB2ENR EQU (RCC_BASE + 0x18)
RCC_APB1ENR EQU (RCC_BASE + 0x1C)
RCC_BDCR EQU (RCC_BASE + 0x20)
RCC_CSR EQU (RCC_BASE + 0x24)
;AFIO寄存器地址映像
AFIO_BASE EQU 0x40010000
AFIO_EVCR EQU (AFIO_BASE + 0x00)
AFIO_MAPR EQU (AFIO_BASE + 0x04)
AFIO_EXTICR1 EQU (AFIO_BASE + 0x08)
AFIO_EXTICR2 EQU (AFIO_BASE + 0x0C)
AFIO_EXTICR3 EQU (AFIO_BASE + 0x10)
AFIO_EXTICR4 EQU (AFIO_BASE + 0x14)
;GPIOA寄存器地址映像
GPIOA_BASE EQU 0x40010800
GPIOA_CRL EQU (GPIOA_BASE + 0x00)
GPIOA_CRH EQU (GPIOA_BASE + 0x04)
GPIOA_IDR EQU (GPIOA_BASE + 0x08)
GPIOA_ODR EQU (GPIOA_BASE + 0x0C)
GPIOA_BSRR EQU (GPIOA_BASE + 0x10)
GPIOA_BRR EQU (GPIOA_BASE + 0x14)
GPIOA_LCKR EQU (GPIOA_BASE + 0x18)
;GPIO C口控制
GPIOC_BASE EQU 0x40011000
GPIOC_CRL EQU (GPIOC_BASE + 0x00)
GPIOC_CRH EQU (GPIOC_BASE + 0x04)
GPIOC_IDR EQU (GPIOC_BASE + 0x08)
GPIOC_ODR EQU (GPIOC_BASE + 0x0C)
GPIOC_BSRR EQU (GPIOC_BASE + 0x10)
GPIOC_BRR EQU (GPIOC_BASE + 0x14)
GPIOC_LCKR EQU (GPIOC_BASE + 0x18)
;串口1控制
USART1_BASE EQU 0x40013800
USART1_SR EQU (USART1_BASE + 0x00)
USART1_DR EQU (USART1_BASE + 0x04)
USART1_BRR EQU (USART1_BASE + 0x08)
USART1_CR1 EQU (USART1_BASE + 0x0c)
USART1_CR2 EQU (USART1_BASE + 0x10)
USART1_CR3 EQU (USART1_BASE + 0x14)
USART1_GTPR EQU (USART1_BASE + 0x18)
;NVIC寄存器地址
NVIC_BASE EQU 0xE000E000
NVIC_SETEN EQU (NVIC_BASE + 0x0010)
;SETENA寄存器阵列的起始地址
NVIC_IRQPRI EQU (NVIC_BASE + 0x0400)
;中断优先级寄存器阵列的起始地址
NVIC_VECTTBL EQU (NVIC_BASE + 0x0D08)
;向量表偏移寄存器的地址
NVIC_AIRCR EQU (NVIC_BASE + 0x0D0C)
;应用程序中断及复位控制寄存器的地址
SETENA0 EQU 0xE000E100
SETENA1 EQU 0xE000E104
;SysTick寄存器地址
SysTick_BASE EQU 0xE000E010
SYSTICKCSR EQU (SysTick_BASE + 0x00)
SYSTICKRVR EQU (SysTick_BASE + 0x04)
;FLASH缓冲寄存器地址映像
FLASH_ACR EQU 0x40022000
;SCB_BASE EQU (SCS_BASE + 0x0D00)
MSP_TOP EQU 0x20005000
;主堆栈起始值
PSP_TOP EQU 0x20004E00
;进程堆栈起始值
BitAlias_BASE EQU 0x22000000
;位带别名区起始地址
Flag1 EQU 0x20000200
b_flas EQU (BitAlias_BASE + (0x200*32) + (0*4))
;位地址
b_05s EQU (BitAlias_BASE + (0x200*32) + (1*4))
;位地址
DlyI EQU 0x20000204
DlyJ EQU 0x20000208
DlyK EQU 0x2000020C
SysTim EQU 0x20000210
;常数定义
Bit0 EQU 0x00000001
Bit1 EQU 0x00000002
Bit2 EQU 0x00000004
Bit3 EQU 0x00000008
Bit4 EQU 0x00000010
Bit5 EQU 0x00000020
Bit6 EQU 0x00000040
Bit7 EQU 0x00000080
Bit8 EQU 0x00000100
Bit9 EQU 0x00000200
Bit10 EQU 0x00000400
Bit11 EQU 0x00000800
Bit12 EQU 0x00001000
Bit13 EQU 0x00002000
Bit14 EQU 0x00004000
Bit15 EQU 0x00008000
Bit16 EQU 0x00010000
Bit17 EQU 0x00020000
Bit18 EQU 0x00040000
Bit19 EQU 0x00080000
Bit20 EQU 0x00100000
Bit21 EQU 0x00200000
Bit22 EQU 0x00400000
Bit23 EQU 0x00800000
Bit24 EQU 0x01000000
Bit25 EQU 0x02000000
Bit26 EQU 0x04000000
Bit27 EQU 0x08000000
Bit28 EQU 0x10000000
Bit29 EQU 0x20000000
Bit30 EQU 0x40000000
Bit31 EQU 0x80000000
;向量表
AREA RESET, DATA, READONLY
DCD MSP_TOP ;初始化主堆栈
DCD Start ;复位向量
DCD NMI_Handler ;NMI Handler
DCD HardFault_Handler ;Hard Fault Handler
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD 0
DCD SysTick_Handler ;SysTick Handler
SPACE 20 ;预留空间20字节
;代码段
AREA |.text|, CODE, READONLY
;主程序开始
ENTRY
;指示程序从这里开始执行
Start
;时钟系统设置
ldr r0, =RCC_CR
ldr r1, [r0]
orr r1, #Bit16
str r1, [r0]
;开启外部晶振使能
;启动外部8M晶振
ClkOk
ldr r1, [r0]
ands r1, #Bit17
beq ClkOk
;等待外部晶振就绪
ldr r1,[r0]
orr r1,#Bit17
str r1,[r0]
;FLASH缓冲器
ldr r0, =FLASH_ACR
mov r1, #0x00000032
str r1, [r0]
;设置PLL锁相环倍率为7,HSE输入不分频
ldr r0, =RCC_CFGR
ldr r1, [r0]
orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14)
orr r1, #Bit10
str r1, [r0]
;启动PLL锁相环
ldr r0, =RCC_CR
ldr r1, [r0]
orr r1, #Bit24
str r1, [r0]
PllOk
ldr r1, [r0]
ands r1, #Bit25
beq PllOk
;选择PLL时钟作为系统时钟
ldr r0, =RCC_CFGR
ldr r1, [r0]
orr r1, #(Bit18 :OR: Bit19 :OR: Bit20 :OR: Bit16 :OR: Bit14)
orr r1, #Bit10
orr r1, #Bit1
str r1, [r0]
;其它RCC相关设置
ldr r0, =RCC_APB2ENR
mov r1, #(Bit14 :OR: Bit4 :OR: Bit2)
str r1, [r0]
;IO端口设置
ldr r0, =GPIOC_CRL
ldr r1, [r0]
orr r1, #(Bit28 :OR: Bit29)
;PC.7输出模式,最大速度50MHz
and r1, #(~Bit30 & ~Bit31)
;PC.7通用推挽输出模式
str r1, [r0]
;PA9串口0发射脚
ldr r0, =GPIOA_CRH
ldr r1, [r0]
orr r1, #(Bit4 :OR: Bit5)
;PA.9输出模式,最大速度50MHz
orr r1, #Bit7
and r1, #~Bit6
;10:复用功能推挽输出模式
str r1, [r0]
ldr r0, =USART1_BRR
mov r1, #0x271
str r1, [r0]
;配置波特率-> 115200
ldr r0, =USART1_CR1
mov r1, #0x200c
str r1, [r0]
;USART模块总使能 发送与接收使能
;71 02 00 00 2c 20 00 00
;AFIO 参数设置
;Systick 参数设置
ldr r0, =SYSTICKRVR
;Systick装初值
mov r1, #9000
str r1, [r0]
ldr r0, =SYSTICKCSR
;设定,启动Systick
mov r1, #0x03
str r1, [r0]
;NVIC
;ldr r0, =SETENA0
;mov r1, 0x00800000
;str r1, [r0]
;ldr r0, =SETENA1
;mov r1, #0x00000100
;str r1, [r0]
;切换成用户级线程序模式
ldr r0, =PSP_TOP
;初始化线程堆栈
msr psp, r0
mov r0, #3
msr control, r0
;初始化SRAM寄存器
mov r1, #0
ldr r0, =Flag1
str r1, [r0]
ldr r0, =DlyI
str r1, [r0]
ldr r0, =DlyJ
str r1, [r0]
ldr r0, =DlyK
str r1, [r0]
ldr r0, =SysTim
str r1, [r0]
;主循环
main
ldr r0, =Flag1
ldr r1, [r0]
tst r1, #Bit1
;SysTick产生0.5s,置位bit 1
beq main ;0.5s标志还没有置位
;0.5s标志已经置位
ldr r0, =b_05s
;位带操作清零0.5s标志
mov r1, #0
str r1, [r0]
bl LedFlas
mov r0, #'H'
bl send_a_char
mov r0, #'e'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'o'
bl send_a_char
mov r0, #' '
bl send_a_char
mov r0, #'w'
bl send_a_char
mov r0, #'o'
bl send_a_char
mov r0, #'r'
bl send_a_char
mov r0, #'l'
bl send_a_char
mov r0, #'d'
bl send_a_char
mov r0, #'\\n'
bl send_a_char
b main
;子程序 串口1发送一个字符
send_a_char
push {r0 - r3}
ldr r2, =USART1_DR
str r0, [r2]
b1
ldr r2, =USART1_SR
ldr r2, [r2]
tst r2, #0x40
beq b1
;发送完成(Transmission complete)等待
pop {r0 - r3}
bx lr
;子程序 led闪烁
LedFlas
push {r0 - r3}
ldr r0, =Flag1
ldr r1, [r0]
tst r1, #Bit0
;bit0 闪烁标志位
beq ONLED ;为0 打开led灯
;为1 关闭led灯
ldr r0, =b_flas
mov r1, #0
str r1, [r0]
;闪烁标志位置为0,下一状态为打开灯
;PC.7输出0
ldr r0, =GPIOC_BRR
ldr r1, [r0]
orr r1, #Bit7
str r1, [r0]
b LedEx
ONLED
;为0 打开led灯
ldr r0, =b_flas
mov r1, #1
str r1, [r0]
;闪烁标志位置为1,下一状态为关闭灯
;PC.7输出1
ldr r0, =GPIOC_BSRR
ldr r1, [r0]
orr r1, #Bit7
str r1, [r0]
LedEx
pop {r0 - r3}
bx lr
;异常程序
NMI_Handler
bx lr
HardFault_Handler
bx lr
SysTick_Handler
ldr r0, =SysTim
ldr r1, [r0]
add r1, #1
str r1, [r0]
cmp r1, #500
bcc TickExit
mov r1, #0
str r1, [r0]
ldr r0, =b_05s
;大于等于500次 清零时钟滴答计数器 设置0.5s标志位
;位带操作置1
mov r1, #1
str r1, [r0]
TickExit
bx lr
ALIGN
;通过用零或空指令NOP填充,来使当前位置与一个指定的边界对齐
END
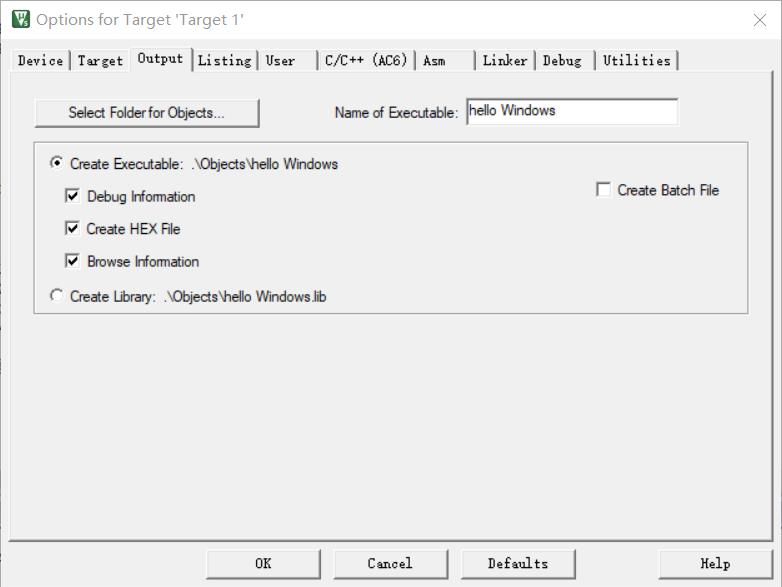
打开魔法棒 勾选Create HEX File,以便输出HEX文件:
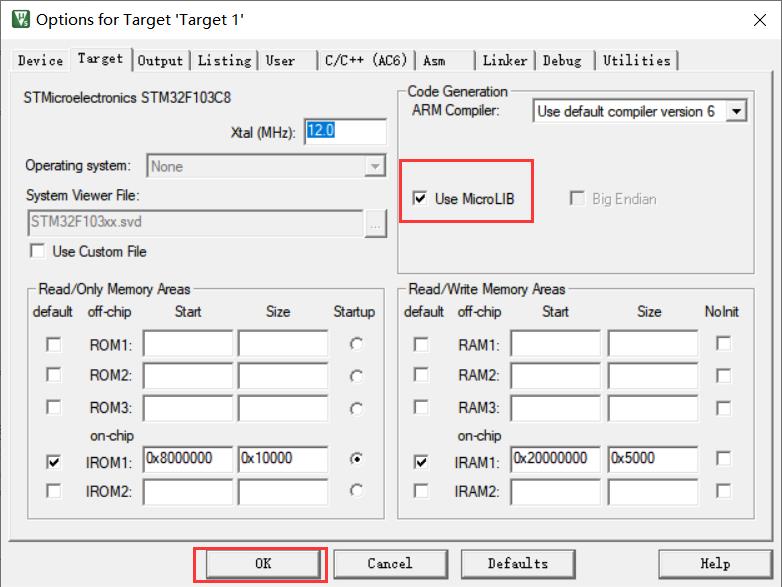
勾选Use MicroLIB:
编译:

利用USB转串口烧录程序,将波特率改为115200;
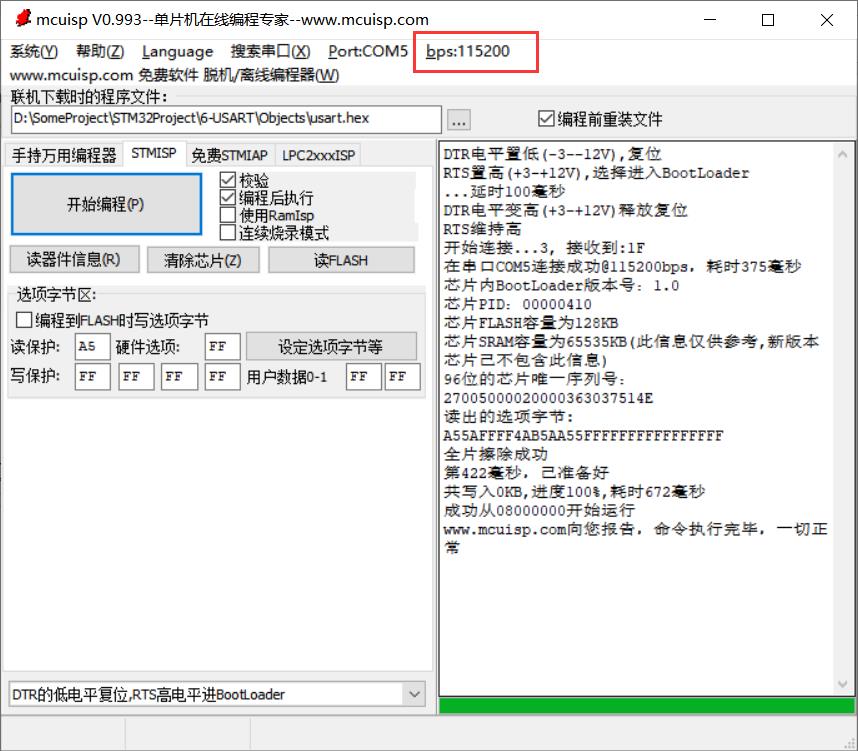
将boot0和boot1都接0,重新接电:
三、结果
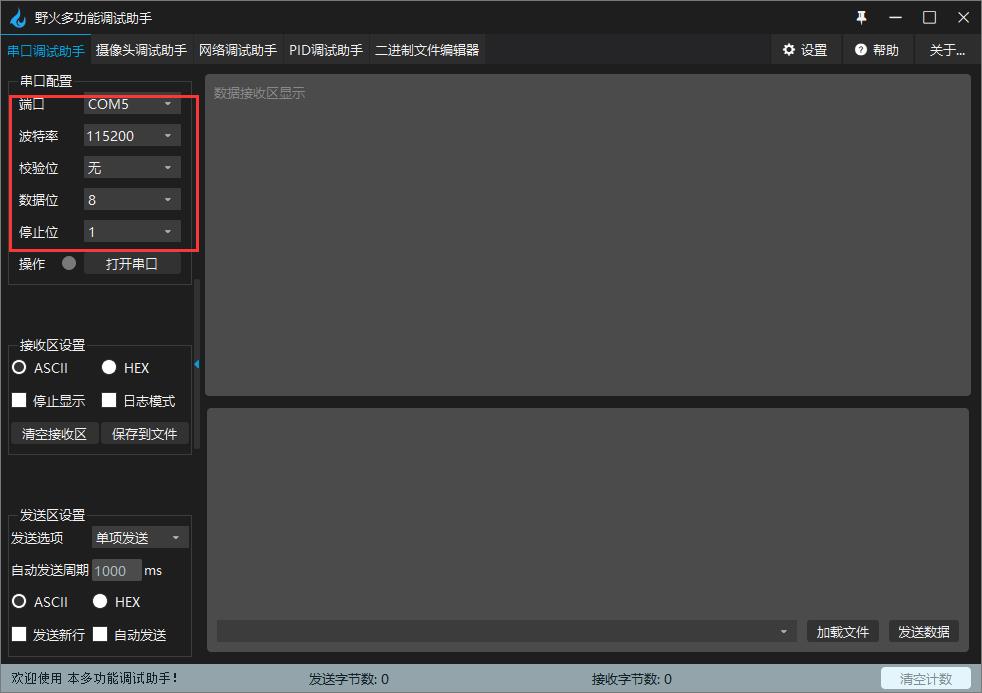
打开野火串口调试助手,设置如图:
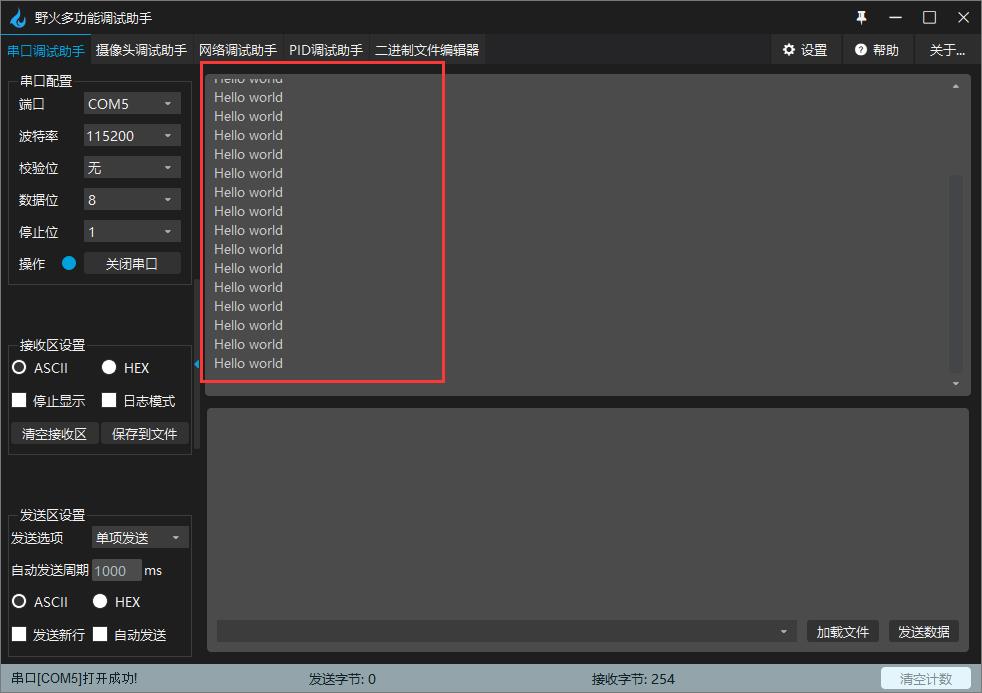
打开串口,成功接收:
总结
串口通信可实现高速数据通信。
参考资料
https://blog.csdn.net/weixin_46628481/article/details/120852364
以上是关于STM32的USART串口通讯程序的主要内容,如果未能解决你的问题,请参考以下文章