翻译: 欢迎使用 KITTI Vision Benchmark Suite!
Posted 架构师易筋
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了翻译: 欢迎使用 KITTI Vision Benchmark Suite!相关的知识,希望对你有一定的参考价值。
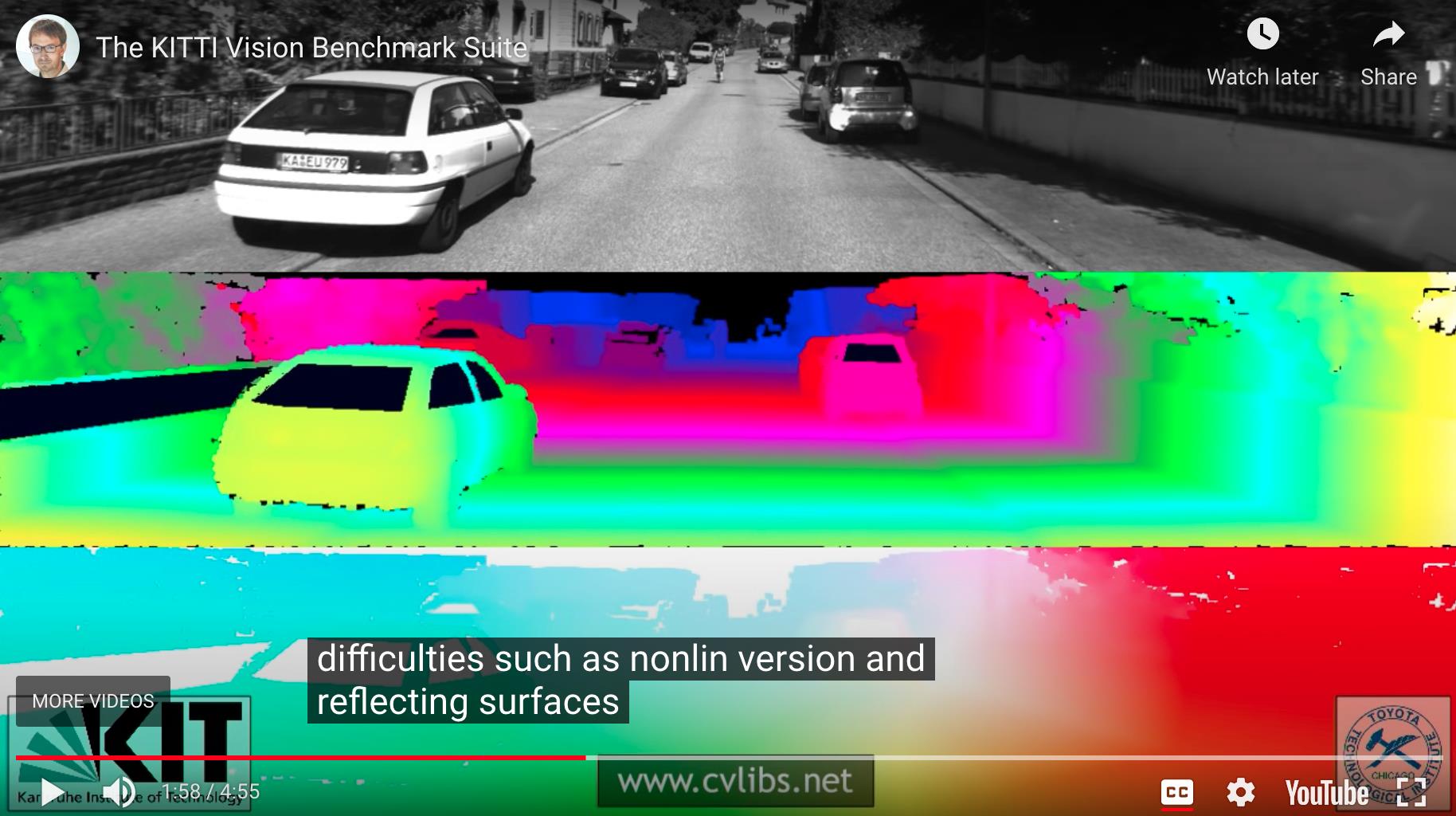
我们利用我们的自动驾驶平台 Annieway开发新颖的具有挑战性的现实世界计算机视觉基准。我们感兴趣的任务是:立体、光流、视觉里程计、3D 对象检测和 3D 跟踪。为此,我们为一辆标准旅行车配备了两个高分辨率彩色和灰度摄像机。Velodyne 激光扫描仪和 GPS 定位系统提供准确的地面实况。我们的数据集是通过在卡尔斯鲁厄这个中等规模的城市中行驶而捕获的,在农村地区和高速公路上。每张图像最多可以看到 15 辆汽车和 30 名行人。除了以原始格式提供所有数据外,我们还为每个任务提取基准。对于我们的每个基准,我们还提供了一个评估指标和这个评估网站。初步实验表明,在已建立的基准(如Middlebury)上排名靠前的方法在从实验室转移到现实世界时表现低于平均水平。我们的目标是通过向社区提供具有新困难的真实世界基准来减少这种偏见并补充现有基准。



变更日志
25.2.2021:我们更新了跟踪和MOTS的评估程序。评估现在使用HOTA 指标并使用TrackEval 代码库执行。
04.12.2019:我们为多目标跟踪和分割 (MOTS) 添加了一个新颖的基准!
18.03.2018:我们为语义分割和语义实例分割添加了新颖的基准!
2017 年 12 月 11 日:我们为深度补全和单幅图像深度预测添加了新颖的基准!
26.07.2017:我们为 3D 对象检测添加了新的基准,包括 3D 和鸟瞰图评估。
26.07.2016:为了灵活性,我们现在每月最多允许 3 次提交,并分别计算提交到不同基准的次数。
参考
http://www.cvlibs.net/datasets/kitti/
以上是关于翻译: 欢迎使用 KITTI Vision Benchmark Suite!的主要内容,如果未能解决你的问题,请参考以下文章
论文翻译MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications