无人机开发-图传技术
Posted bobuddy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了无人机开发-图传技术相关的知识,希望对你有一定的参考价值。
2016年,是中国无人机市场的元年,无人机能够一跃进入大众视野,并迅速在大众市场火热发展,是很多人始料未及的。从刚开始的空中摄录,到后来的实时摄录,方便的无人机图传功能无疑为无人机加足了筹码,赚足了眼球。博主就来分析一下无人机图传技术。
一.观念
从“图传”的叫法可以发现,这并非一个专业的定义,大概是从某些资深航模玩家口中发展而来。专业的航空航天器并没有独立的视频图像传输设备。图传的概念只存在于消费类无人机领域。
二.限制
1.成本:
不必去怀疑可以通讯多快多远,无线通讯技术发展到今天,没有人怀疑火星传回的1080P图像了。
百公里以上无人机图传并非不可实现,但百万元以上的价格也相对昂贵。
目前市场上的1080P图传产品售价基本均在1700美元以内,成本也就成为了消费类无人机图传设计的第一条限制。
2.法律:
中国无线电管理的最高法律文件是《中华人民共和国无线电管理条例》,立法机关为国务院和中央军委,由各级无线电管理机构执行监管。如果使用者希望给图传单独申请执照,则需要该图传首先获得《无线电发射设备型号核准证》,其依据是国家《无线电频率划分规定》中的有关无线电发射设备技术指标的规定。取得专业电台执照并不是不可操作,只是在消费类无人机领域没有办法推广。
对于专业航空航天器来说,频谱划分时已留有专门的测控频段,而消费类无人机只能老老实实地屈就于ITU-R(ITU Radio Communication Sector,国际通信联盟无线电通信局)的ISM频段(Industrial Scientific Medical,工业化科学医疗频段)。
13.56Mhz、27.12Mhz、40.68MHz、433Mhz、915Mhz、2.4Ghz、5.8GHz都是1W以内无需执照发射的;
433MHz及以下频段通常很难满足高清图传的带宽要求;
915Mhz频段有一半已经被GSM占用;
L波带宽并不富裕;
S波段的2.4GHz也就成了1080P获得远距离的首选,但4K或者更高清晰度的图传设计者却很难在S波段的带宽上找到便宜;
C波段的5.8G则可以做得更宽,不过相同发射功率和接收灵敏度下5.8G与2.4G相比通讯距离仅为41.4%,并且其衰减对水气更敏感,实际通讯距离则不到30%,两者各有利弊。
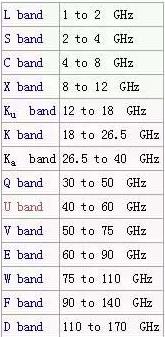
图1 无线频谱
三.编码技术
1.软/硬件结构:OpenMAX IL + Venus
2.编码标准:H.264(APQ8074)/H.265(APQ8053)
3.码率控制:CBR(Constant Bit Rate)网络传输中所谓的 CBR 一般是 ABR(平均码率),即单位时间内的平均码率恒定,编码输出有缓冲可以起到平滑波动的作用。

图2 码率
4.码率/帧率自适应:Dynamic video rate adaptation (rave)是Qualcomm提供的算法库,基于变化的Wi-Fi带宽和信道质量,计算出合适的视频流码率和帧率,这有助于最大限度地减少延迟和图像损坏问题。
5.I帧间隔调整:30fps帧率下,30帧或者60帧一个I帧。能在较低的码率下达到较高的图像质量。
6.I帧重传:如果I帧丢失或者损坏,图像会有较长时间的卡顿。当接收端反馈此情况,发送端立即重传I帧,会减少卡7.顿时间。
8.I帧携带SPS/PPS信息:缺少SPS/PPS信息,接收端将不能正确解码,所以流中需要带这些信息,防止断线重连后黑屏。
四.通用协议
1.RTP
1.1.协议简单,易组入
1.2.jrtp开源库:X许可,几乎无限制。
1.3.针对H.264/H.265编码特点进行优化:不同的组包策略。
1.4.扩展可配置发包间隔:平衡码率波动,防止瞬时码率过大。
1.5.使用RTP扩展头:传递帧号,用于算法的数据同步。
1.6.使用内存池:减少模块间内存拷贝,降低延迟。
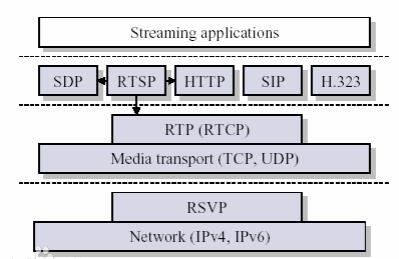
图3 RTP
2.RTSP
2.1.支持组播:Live555开源库
2.2.LGPLv2.1许可,可以在商业软件中引用。
2.3.相关类说明

图4 RTSP相关类
2.4.数据传递示意图:RTSP server接收到RTSP开始后,PreviewH264OnDemandMediaSubsession创建了H264PreviewSouce类和H264VideoStreamDiscreteFramer类之后H264PreviewSouce通过队列从Rtspsink中获取h264数据,经过处理后发送到手机端。
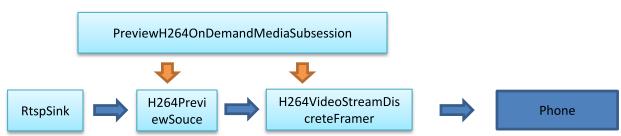
图5 RTSP 数据流
3.图传开发中遇到的问题
实时播放过程,最难解决的问题是图像卡顿,图像花瓶问题,图像在各个手机表现不一样,在性能好的手机上面,会出现图像抖动厉害的情况等等。
要解决图像卡顿的问题,先要知道卡顿的原因:
1.由数据在传输过程中丢失,没有数据,造成的卡顿
2.app端接收不及时,造成数据丢失而引起的卡顿
3.为了减少花屏,而造成的卡顿,比如说刚好丢失了i帧,为了后面显示不花屏,会对后面的p帧进行抛掉,直到下一个i帧才开始显示
我们都知道花屏的原因是因为丢帧造成的,比如说丢失了 i帧,关键帧,后面的p帧送去给ffmpeg解码得到的图像是花屏,或者马赛克等等(也有一种是大p,小p的说法,这里就不详细说了),【注意,这个传输过程没有用到b帧,整个传输过程只有两种帧 i帧,个p帧】,多一点花屏,可以减少卡顿,客户更能接受的是卡顿,而不是花屏。
解决方案:
第一个问题:由数据在传输过程中丢失,没有数据,造成的卡顿,有外部环境的影响,也有图传板信号的稳定性影响等等,app端没有很好的解决方法,无非就两个选择,一个是tcp传输,一个是udp传输。根据实测,tcp效果更好一点。
tcp :数据传输过程,能保正数据的完整,所以花屏少点,距离相对upd会近一点,
udp:传输过程不保证数据的完整性,容易花屏,距离比较远
第二个问题:app端接收不及时,造成数据丢失而引起的卡顿,我这里遇到的情况是这样的,之前的接收数据跟解码同一个线程,显示另外一个线程,这样就有一种情况就是解码不及时,会造成接收线程阻塞,从而影响了数据的接收(udp),解决方案是接收数据自己一个线程,解码跟显示一个线程,中间通过缓存队列来进行数据的共享,即增加缓存,基本所有的在线播放都是用这个方式。
第三个问题:就客户需求而定,我这里为了不花屏,会直接丢掉
项目使用mpv+EventBus的方式非常灵活,模块的替换,复用,重写都很灵活,而且java层没有特殊必要,一般都不会动,优化各个方面都是在jni层,也主要是图传的优化,这样也方便版本的迭代,要不客户版本升级要多痛苦。
分享是人类进步的源泉,可参考:
http://blog.csdn.net/ad3600/article/details/54706102
http://blog.csdn.net/tpyangqingyuan/article/details/54574977
以上是关于无人机开发-图传技术的主要内容,如果未能解决你的问题,请参考以下文章
无人机使用4G的图传数传连接地面站,遥控器怎么和地面站连接?
多卡聚合智能融合通信设备无人机图传在防汛应急指挥中的解决方案