cartographer导航的时候更新地图
Posted COCO_PEAK_NOODLE
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了cartographer导航的时候更新地图相关的知识,希望对你有一定的参考价值。
我的方案,
1- 使用谷歌作者的overlapping_submaps_trimmer_2d来缩减地图,但是这个计算量太大了,我使用了局部计算来代替全局计算,这样间隔一段时间就缩减1-2个地图,计算量有所降低,其实还有更低的(还未实现,思路是不重复计算所有地图,维护一个数据,每次只更新新增的部分)
std::vector<SubmapId> near_submap;
if(newly_finished_submap_flag)
{
cartographer::transform::Rigid3d submap_global_pose =
GetSubmapDataUnderLock(newly_finished_submap_id).pose;
near_submap = FindPoseOfSubmapInTrajectory(submap_global_pose, 3);
newly_finished_submap_flag = false;
}
std::vector<SubmapId> PoseGraph2D::FindPoseOfSubmapInTrajectory(
const transform::Rigid3d& initial_pose, int near_count) const {
// find the nearist submap of initial_pose
// double min_distance = INT_MAX;
// SubmapId nearist_submapId(current_map_trajectory_id_, 0);
std::priority_queue<submap_sort> submap_sort_by_distance;
const transform::Rigid2d initial_pose_2d = transform::Project2D(initial_pose);
// for (const auto& submap_id_data :
// data_.submap_data.trajectory(current_map_trajectory_id_))
for (const auto& submap_id_data : data_.submap_data) {
// if(submap_id_data.id.trajectory_id != current_map_trajectory_id_)
// continue;
if(submap_id_data.data.state != SubmapState::kFinished) continue;
auto submap_data = data_.global_submap_poses_2d.at(submap_id_data.id);
double distance =
(initial_pose_2d.inverse() * submap_data.global_pose).translation().norm();
// submap_sort_by_distance.emplace(distance, current_map_trajectory_id_,
// submap_id_data.id.submap_index);
submap_sort_by_distance.emplace(distance, submap_id_data.id.trajectory_id,
submap_id_data.id.submap_index);
}
std::vector<SubmapId> submap_ids;
int count_num = submap_sort_by_distance.size();
for (int i = 0; i < count_num; i++) {
if (i == near_count) break;
SubmapId id(submap_sort_by_distance.top().trajectory_id,
submap_sort_by_distance.top().index);
submap_ids.push_back(id);
// LOG(INFO) << "Localize trajectory " << id.trajectory_id << " submap index
// "
// << id.submap_index;
submap_sort_by_distance.top().distance;
submap_sort_by_distance.pop();
}
return submap_ids;
}
2- 当前活跃的子图只有最前面的3个,其余的在导航过程中逐渐固定。
optimization_problem_->Solve(data_.constraints, GetTrajectoryStates(),
data_.landmark_nodes);
// if(empty_landmark == true) data_.landmark_nodes.clear();
// author add it , but peak remove it
absl::MutexLock locker(&mutex_);
std::vector<SubmapId> navigation_submap_ids;
for (const auto& it : optimization_problem_->submap_data().trajectory(1001)) {
navigation_submap_ids.push_back(it.id);
}
//
if (current_trajectory_type_ == TrajectoryType::NAVIGATION &&
global_optimization_in_navigation_ == true &&
navigation_submap_ids.size() > 3) {
auto& mutable_submap_data = optimization_problem_->mutable_submap_data();
auto& mutable_node_data = optimization_problem_->mutable_node_data();
for (int i = 0; i + 3 < navigation_submap_ids.size(); i++) {
const auto submap_id = data_.submap_data.find(navigation_submap_ids[i]);
if (submap_id == data_.submap_data.end()) {
continue;
} else {
mutable_submap_data.at(navigation_submap_ids[i]).state =
optimization::State::kFrozen;
LOG(INFO) << "Peak.ding frozen " << navigation_submap_ids[i];
}
std::set<NodeId> nodes_id_frozen =
data_.submap_data.at(navigation_submap_ids[i]).node_ids;
for (auto node_id : nodes_id_frozen) {
mutable_node_data.at(node_id).state = optimization::State::kFrozen;
}
}
/*
for (auto it : mutable_node_data) {
if (it.id.trajectory_id != 0) {
mutable_node_data.at(it.id).state = optimization::State::kFrozen;
}
}
*/
global_optimization_in_navigation_ = false;
}
ok,来张来回运行6趟的图
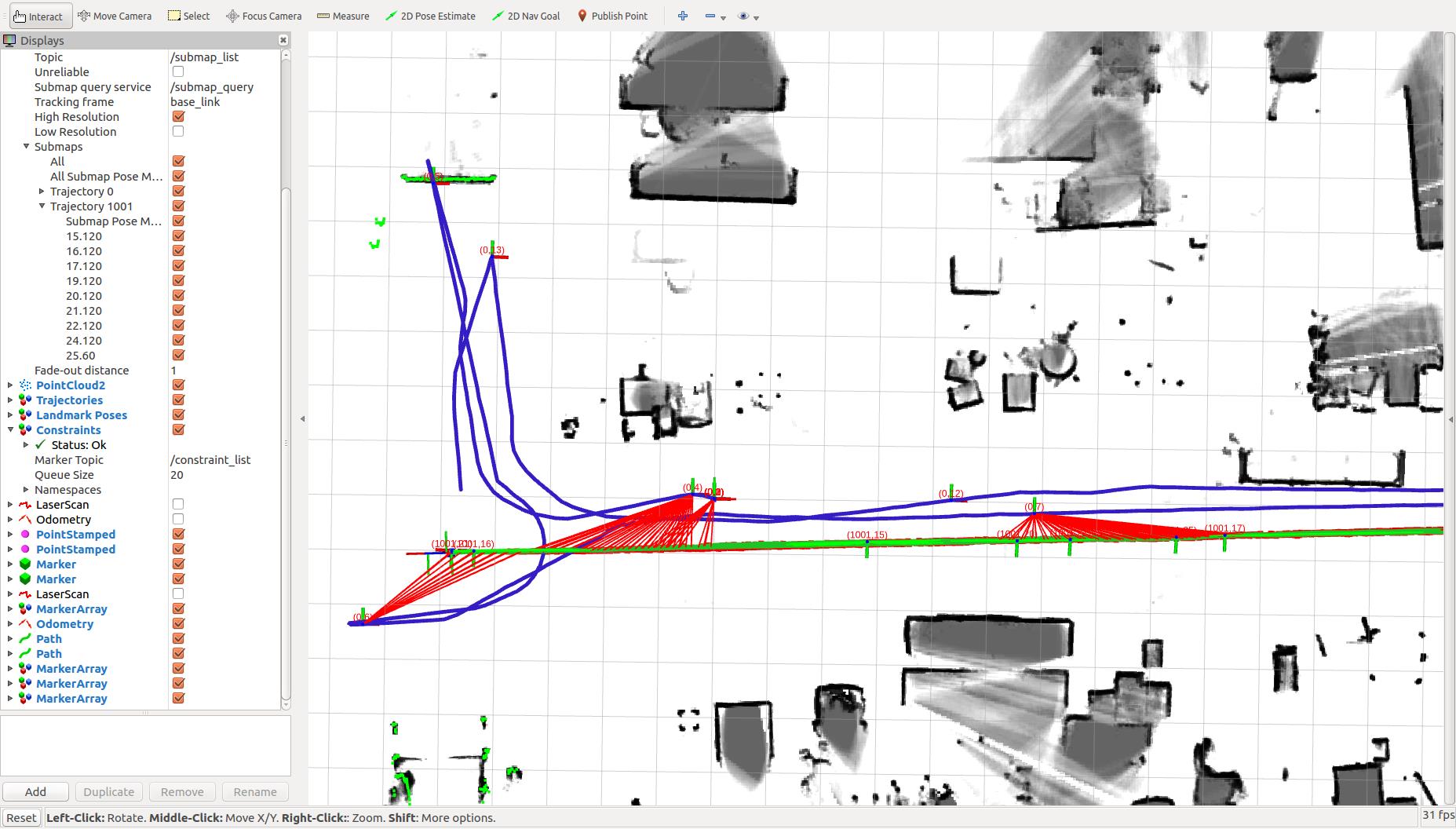
后续实验结果再来分析
以上是关于cartographer导航的时候更新地图的主要内容,如果未能解决你的问题,请参考以下文章