智能视觉组参赛总结及体会- 西安邮电大学 - AI小布丁
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了智能视觉组参赛总结及体会- 西安邮电大学 - AI小布丁相关的知识,希望对你有一定的参考价值。

§01 参赛总结
卓老师您好,我们是西安邮电大学参与16届智能视觉组的代表队,很荣幸拿到了今年全国总决赛一等奖的好成绩。下面我将分享我们的参赛总结。
Ⅰ.总体分析
相较于15届的AI电磁以及今年的室外越野来说,智能视觉组是一个 全新的AI组别。其涉及了嵌入式,机器视觉,图像处理,神经网络等方面知识。对于大多数学生来说,大家几乎完全在同一个起跑线上,除了传统循迹之外,增加了其它元素识别任务。而且在国赛时识别部分的权重更高了,所谓的祖传代码的优势便不能发挥出强大的优势了,因此,也就打破了往年所谓强校弱校的"标准",这就更加考验本届参赛选手的个人能力和团队协作能力。
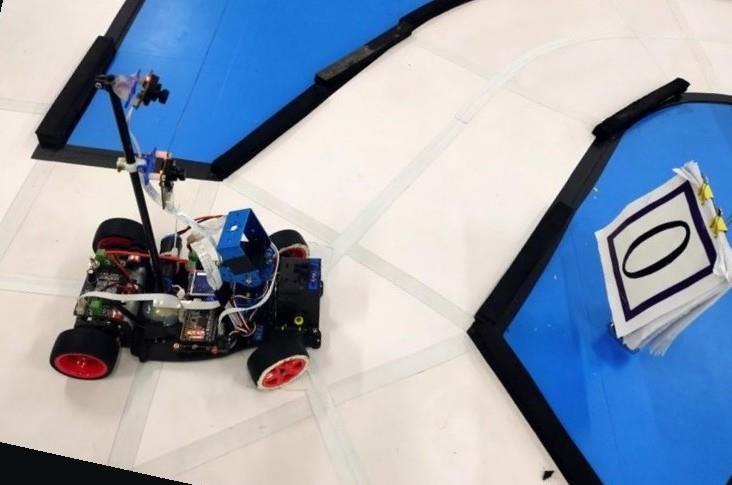
▲ 图1.0 处在三岔路口的车模
Ⅱ.硬件部分
① 硬件电路设计
本组硬件原理图如下所示
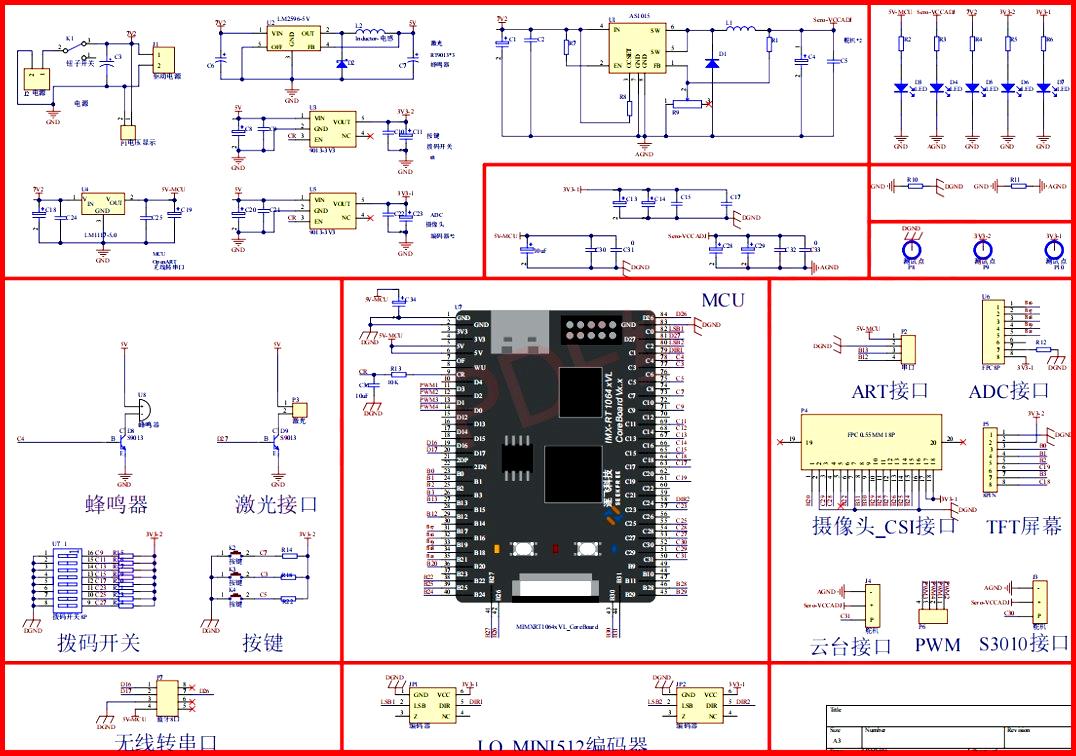
▲ 图1.1 智能视觉硬件原理图
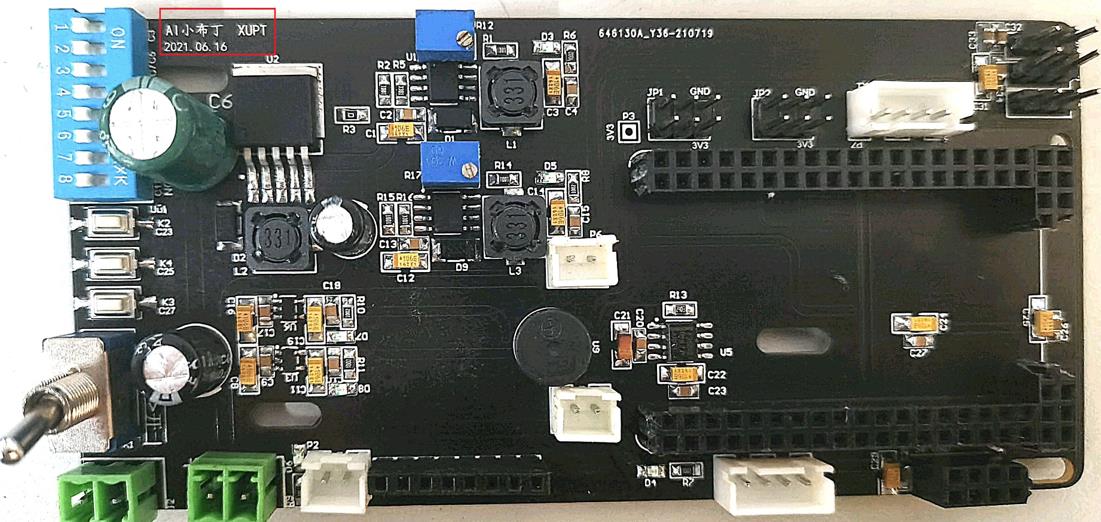
▲ 图1.1.1 主板实物图
其中,相较于其他组别,AI视觉组有着更多的耗电设备,因此我们选用了大容量锂电池作为电源,以及采用了两片AS1015稳压芯片分别给S3010舵机和二自由度机械臂供电。AS1015稳压芯片相较于AMS1117稳压芯片,其可输出更大的电流,以便更加稳定的控制舵机。
② 结构
由于AI视觉组相较于其他组别,需要搭载一个可转动的舵机云台(或者其他结构),以便完成AprilTAG码识别,水果动物识别,激光打靶等任务。但是由于一般的舵机云台质量偏大,因此我们采用了自制的轻量型机械臂结构,相对于搭载传统普通舵机云台,其优点是质量轻,车体重心偏移小。而且自由度较高,将Open-ART搭载在其上,其可视范围角度约270°,能将AprilTAG码前后25cm尽收眼底,以便更好的完成任务。

▲ 图1.2 车模前视图(即将出发去西部赛区比赛前的照片)
Ⅲ.控制部分
① 图像预处理–canny算子:
- 算法优点:得到的边界信息非常真实,噪点少,抗光干扰性强
- 算法缺点:耗时长,对单片机性能要求高,
算法步骤:
1. 高斯滤波:滤掉噪声
2. Sobol边缘检测:通过两个算子对图像的x轴和y轴进行卷积运算,得出两个值x轴上的梯度tempx和Y轴上的梯度tempy,可以通过这里两个值算出该像素点的梯度幅值和梯度方向。
3. 极大值抑制:sobol处理后得到的边缘很宽,这一步是将像素点的额梯度幅值和它梯度方向上的相邻的两个值进行比较,如果不是最大值,就抑制,是最大值,则保留。
4. 双阈值连接:大于高阈值的像素给255,低于低阈值的给0,中间的则将之与附近的八个像素点比较,如果有大于高阈值的像素点,则给255,否则给0。

▲ 图1.3 车模赛道积分阶段
② 舵机模糊PID控制
- 1) 算法优点:与传统固定常量PID和分段式PID相比,在高速时,传统PID在直道会出现车身左右震荡的情况,非线性系统拟合性不太好,分段PID在分的断点附近会出现震荡,而模糊PID具有很好的误差跟随性,响应快,准确,车身不再出现左右震荡的情况,而且不同的速度,都能很好的运行。
- 2) 算法缺点:参数多,调参困难;算法复杂。结合我们车的实际情况及需求,为了简化参数,我们只模糊P,而I和D都是调好的常量。
阿克曼差速:
- 算法概述:后轮的左右车速在转向时,内侧速度小,外侧车速大,这与前轮的舵机打角值成对应关系,这种关系就是阿克曼转向模型。

▲ 图1.5 赛道积分成绩确认
Ⅳ.识别部分
本组采用了基于Tensorflow深度学习框架,自行搭建的卷积神经网络模型。识别时,先利用OpenART寻找合适大小的矩形框,再对其进行分类。
(参赛使用的模型均为采用了轻量化后.tflite模型文件)
1. 数字分类模型:采用了MINIST数据集作为训练集,四层简单的卷积神经网络作为模型进行训练,最终获得的效果较好。
2. 水果动物分类模型:采用了爬虫获取以及官方给出的部分数据集,对其进行图像增强,并且搭建了卷积神经网络进行分类,最终效果表现较好(调整Open ART至合适的曝光度的情况下)虽然在西部赛区由于种种原因,其表现状态不佳,说白了还是因为我太菜了。
3. AprilTAG码识别:调用内置包接口即可。偶尔会出现一些误判
4. 激光打靶:采用了简单的建模思想和传统的PID控制。但是效果一般,可能真的因为我太菜了
5. 在全国总决赛中,由于规定图片随机出现,且包含有空白图片,对此,我采用了模型嵌套思想,概况如下:
先做一个简单的分类模型,分类出空白,数字,二维码,其他四类,先对图片进行分类,再对内容调用相应的模型或方法。(本人亲测识别一次所需时间约为75ms)由于对AI模型理解并不深,导致最终模型效果受光线影响较强。
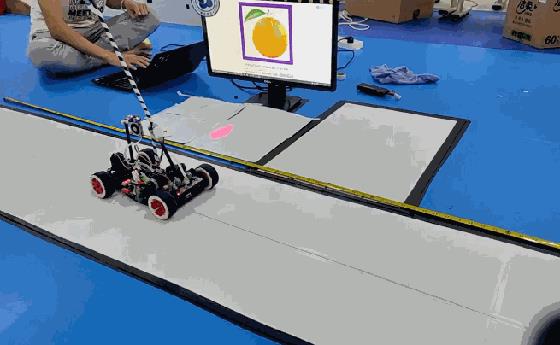
▲ 图1.4 目标识别积分阶段
Ⅴ.参赛体会
总的来说,智能视觉组是一个引入了前沿技术,对综合能力考验强,挑战性高,趣味性高的组别。让参赛选手能从智能车竞赛中提高自己能力以及能够更全面地认知和学习前沿技术。
§02 大赛展望
一、NXP大学计划
学校对于NXP大学计划有浓厚的兴趣,希望NXP能推出性能更加优越适用性更广的芯片用于教学和竞赛中。最好能够达到在适配RT-Thread同时可以流畅运行中小规模的AI模型。
PS:本人作为17届参赛预备选手,真真真心希望芯片价格低一点或者给每个学校的补助芯片多一点。
二、赛题展望
希望在17届中能出现更多的新元素比如加上抄近道,比如AI视觉任务遇上AI电磁循迹(想想都刺激),或者基于摄像头AI循迹,把AI更多的融入进创意组,同时也希望更多的贴近现实生活,比如:多车同赛道同时竞速,加入测速区间
(如不达标下限或者超出上限则加时)
希望加入一个近道元素(在无判罚),如下图所示:

▲ 图2.1 赛道中的“近道元素”
● 相关图表链接:
- 图1.0 处在三岔路口的车模
- 图1.1 智能视觉硬件原理图
- 图1.1.1 主板实物图
- 图1.2 车模前视图(即将出发去西部赛区比赛前的照片)
- 图1.3 车模赛道积分阶段
- 图1.5 赛道积分成绩确认
- 图1.4 目标识别积分阶段
- 图2.1 赛道中的“近道元素”
◎ 公众号留言:
-
灼灼其华:卓大大中秋节快乐 -
凌汐凡:都是自己吃饱了,就想砸锅的 -
喜欢发呆:封面小姐姐 -
Upto3:qq飞车党表示这近道我熟悉啊 -
廾匸:直接四驱兄弟那样,整个大赛道。好几辆一起跑 -
陌离:好家伙同赛道竞速,这大半年新手确定调的出来 -
37.5:小姐姐有男朋友了,而且就在图里37.5:而且这个人还是我
-
。:小姐姐的男朋友就是参赛选手,文章的作者 -
森:这近道不得进阶氮气出弯cww? -
岁月如歌:兄弟们厉害
好熟悉的环境
小机智们连窗户都封上了
快去纳新吧
ps:
希望能在西邮举办一次比赛!!! -
prince:虽然这个要求有点过分,但可否开源看下代码呢 -
凉拌卡灰:黄衣服的兄弟貌似竖的是中指 -
chaos:这赛道,跑跑卡丁车手指地图啊
以上是关于智能视觉组参赛总结及体会- 西安邮电大学 - AI小布丁的主要内容,如果未能解决你的问题,请参考以下文章
第16届智能车智能视觉组-上海交通大学AuTop战队算法分享
第十六届全国大学生智能汽车竞赛总决赛 AI视觉组线上赛图片显示软件发布及线上赛注意事项