技术分享 | 基于人工势场法的无人机,机间避撞实现
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了技术分享 | 基于人工势场法的无人机,机间避撞实现相关的知识,希望对你有一定的参考价值。
对于无人机集群飞行除了它的控制方式,轨迹规划、避障等方面的考虑之外,还要考虑无人机集群机间的避撞问题,使得编队既能保持队形又能实现稳定飞行,那么要避免无人机与无人机之间的碰撞,要通过什么样的方式来实现呢?动动脑袋,小小思考一下哦!
下面来看看我们针对解决无人机机间避撞问题所使用的方法吧! 在本次仿真中,我们采用了人工势场法来实现无人机与无人机之间的碰撞。下面将对人工势场法做一个简单介绍。
人工势场法简称APF是Artifical Potential Field的首字母缩写,它的基本思想是,将机器人所在周围环境中的运动设计成抽象的人造引力场中的运动。在APF中,所有的障碍物都被视为有最高势能的地方。假设机器人从山顶前往山下的目标点,借助高度的势差,避开障碍物,到达目标点。人工势场包括引力场和斥力场:其中 目标点产生引力场,对机器人产生引力,引导机器人朝向其运动 障碍物产生斥力场,对机器人产生斥力,致使机器人向反方向运动,避免机器人与之发生碰撞 物体在路径上每一点所受的合力等于这一点所有斥力与引力的和。 详细图解如图 1所示 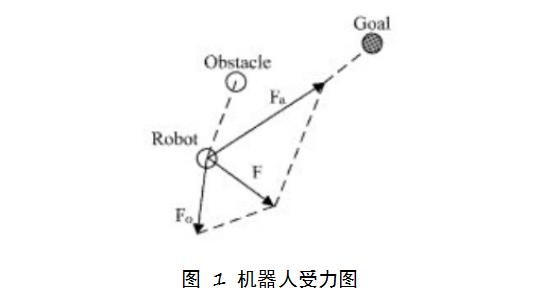 人工势能场的创建在多数情况下使用库伦定理,就是机器人和它周围物体的势能大小与他们之间的距离的平方成反比。机器人的运动由2个力的合力决定,目标点构成吸引力,障碍物构成排斥力,两者力的矢量合就是推动力。 如果把每架无人机都当做一个智能体,那么多智能体的避障或路径规划又是怎么实现驱动的呢? 首先,各智能体安装的传感器的读数被转化成障碍物的距离以及角度,然后代入斥力场计算公式,获得斥力。再根据智能体所处位置计算引力及其角度。将所有力的矢量合相加,获得最终的驱动力矢量。这个驱动力矢量将转化成机器人的驱动信号。合力的垂直分量将转换成机器人的直线行进速度,水平分量将转换成机器人的旋转速度。这个转化过程则需要根据智能体的动力学方程进行。如图 2 所示,产生的F合驱动物体运动。
人工势能场的创建在多数情况下使用库伦定理,就是机器人和它周围物体的势能大小与他们之间的距离的平方成反比。机器人的运动由2个力的合力决定,目标点构成吸引力,障碍物构成排斥力,两者力的矢量合就是推动力。 如果把每架无人机都当做一个智能体,那么多智能体的避障或路径规划又是怎么实现驱动的呢? 首先,各智能体安装的传感器的读数被转化成障碍物的距离以及角度,然后代入斥力场计算公式,获得斥力。再根据智能体所处位置计算引力及其角度。将所有力的矢量合相加,获得最终的驱动力矢量。这个驱动力矢量将转化成机器人的驱动信号。合力的垂直分量将转换成机器人的直线行进速度,水平分量将转换成机器人的旋转速度。这个转化过程则需要根据智能体的动力学方程进行。如图 2 所示,产生的F合驱动物体运动。 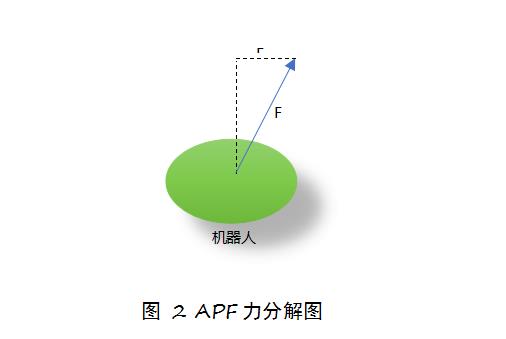 以上就是我们所谈及的人工势场法基本实现,那么在多无人机飞行过程中,要实现无人机机间避撞,则主要是应用斥力场,每一架无人机都会形成自己的斥力场,当在一定距离范围R内,若无人机间的距离r小于给定值R 则无人机就会产生避撞趋势,每架无人机将会朝着远离邻居机的方向做平滑运动,以此来保持无人机与无人机之间有一个合适的距离,避免机机碰撞的发生,如图 3所示。
以上就是我们所谈及的人工势场法基本实现,那么在多无人机飞行过程中,要实现无人机机间避撞,则主要是应用斥力场,每一架无人机都会形成自己的斥力场,当在一定距离范围R内,若无人机间的距离r小于给定值R 则无人机就会产生避撞趋势,每架无人机将会朝着远离邻居机的方向做平滑运动,以此来保持无人机与无人机之间有一个合适的距离,避免机机碰撞的发生,如图 3所示。 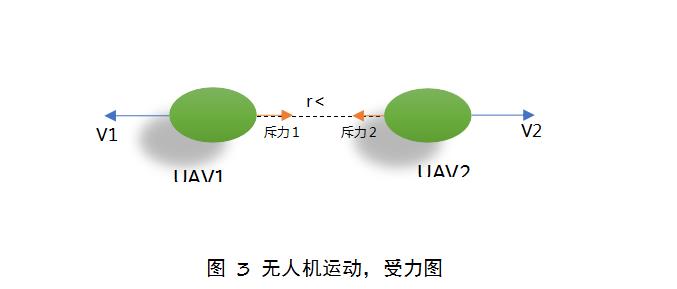 通过人工势场法,既能保证每个无人机之间不会发生碰撞,又能保证无人机的编队队形保持不变,有效的完成了一定的队形变换任务。但是,这样简单的一个避撞算法,也存在一定的缺点,例如当无人机距离目标点太远,将会产生巨大的引力,产生的斥力将会较小,飞行路径时可能会碰到障碍物,或者在某个点,引力与斥力相等,易陷入局部最优解。所以在它的使用过程中,可利用其改进算法避免这些缺点。
通过人工势场法,既能保证每个无人机之间不会发生碰撞,又能保证无人机的编队队形保持不变,有效的完成了一定的队形变换任务。但是,这样简单的一个避撞算法,也存在一定的缺点,例如当无人机距离目标点太远,将会产生巨大的引力,产生的斥力将会较小,飞行路径时可能会碰到障碍物,或者在某个点,引力与斥力相等,易陷入局部最优解。所以在它的使用过程中,可利用其改进算法避免这些缺点。
好了,今天的人工势场法就介绍到这里。
GZH:阿木实验室 ( 领取免费资料包) 官方TB店:阿木实验室(可购买硬件配件) 硬件咨询:yanyue199506(欢迎洽谈合作) 课程咨询:jiayue199506 (免费领取机器人工程师学习计划)
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。
阿木实验室致力于前沿IT科技的教育和智能装备,让机器人研发更高效!
以上是关于技术分享 | 基于人工势场法的无人机,机间避撞实现的主要内容,如果未能解决你的问题,请参考以下文章
路径规划基于人工势场的无人机编队协同路径规划matlab源码