Linux驱动开发: 块设备驱动开发
Posted DS小龙哥
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux驱动开发: 块设备驱动开发相关的知识,希望对你有一定的参考价值。
Linux内核版本: 3.5
测试设备: 友善之臂Tiny4412开发板 (CPU型号: 三星Exynos4412)
2019年三星发布的Galaxy S II和MX采用的就是这款CPU。
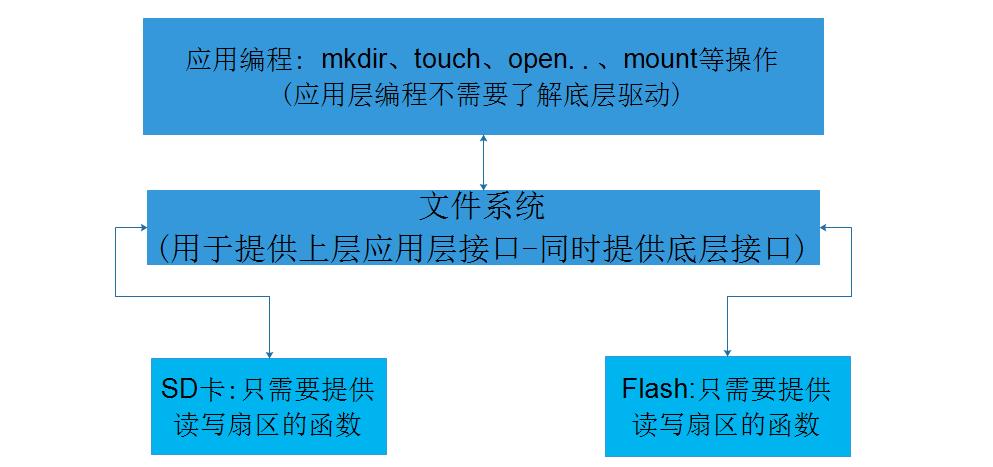
一、块设备介绍
块是一种具有一定结构的随机存取设备,对这种设备的读写是按块进行的,他使用缓冲区来存放暂时的数据,待条件成熟后,从缓存一次性写入设备或者从设备一次性读到缓冲区。
块设备是与字符设备并列的概念, 这两类设备在 Linux 中驱动的结构有较大差异,总体而言, 块设备驱动比字符设备驱动要复杂得多,在 I/O 操作上表现出极大的不同,缓冲、 I/O 调度、请求队列等都是与块设备驱动相关的概念。
在Linux中,驱动对块设备的输入或输出(I/O)操作,都会向块设备发出一个请求,在驱动中用request结构体描述。但对于一些磁盘设备而言请求的速度很慢,这时候内核就提供一种队列的机制把这些I/O请求添加到队列中(即:请求队列),在驱动中用request_queue结构体描述。在向块设备提交这些请求前内核会先执行请求的合并和排序预操作,以提高访问的效率,然后再由内核中的I/O调度程序子系统来负责提交 I/O 请求, 调度程序将磁盘资源分配给系统中所有挂起的块 I/O 请求,其工作是管理块设备的请求队列,决定队列中的请求的排列顺序以及什么时候派发请求到设备。
由通用块层(Generic Block Layer)负责维持一个I/O请求在上层文件系统与底层物理磁盘之间的关系。在通用块层中,通常用一个bio结构体来对应一个I/O请求。
Linux提供了一个gendisk数据结构体,用来表示一个独立的磁盘设备或分区,用于对底层物理磁盘进行访问。在gendisk中有一个类似字符设备中file_operations的硬件操作结构指针,是block_device_operations结构体。
编写块设备驱动时,使用的一些单位介绍:
1. 扇区(Sectors):任何块设备硬件对数据处理的基本单位。通常,1个扇区的大小为512字节。(对设备而言)
2. 块 (Blocks):由Linux制定对内核或文件系统等数据处理的基本单位。通常,1个块由1个或多个扇区组成。(对Linux操作系统而言)
3. 段(Segments):由若干个相邻的块组成。是Linux内存管理机制中一个内存页或者内存页的一部分。

IO调度器
就是电梯算法。我们知道,磁盘是的读写是通过机械性的移动磁头来实现读写的,理论上磁盘设备满足块设备的随机读写的要求,但是出于节约磁盘,提高效率的考虑,我们希望当磁头处于某一个位置的时候,一起将最近需要写在附近的数据写入,而不是这写一下,那写一下然后再回来,IO调度就是将上层发下来的IO请求的顺序进行重新排序以及对多个请求进行合并,这样就可以实现上述的提高效率、节约磁盘的目的。这种解决问题的思路使用电梯算法,一个运行中的电梯,一个人20楼->1楼,另外一个人15->5楼,电梯不会先将第一个人送到1楼再去15楼接第二个人将其送到5楼,而是从20楼下来,到15楼的时候停下接人,到5楼将第二个放下,最后到达1楼,一句话,电梯算法最终服务的优先顺序并不按照按按钮的先后顺序。
Linux内核中提供了下面的几种电梯算法来实现IO调度:
1. No-op I/O scheduler只实现了简单的FIFO的,只进行最简单的合并,比较适合基于Flash的存储
2. Anticipatory I/O scheduler推迟IO请求(大约几个微秒),以期能对他们进行排序,获得更高效率
3. Deadline I/O scheduler试图把每次请求的延迟降到最低,同时也会对BIO重新排序,特别适用于读取较多的场合,比如数据库
4. CFQ I/O scheduler为系统内所有的任务分配均匀的IO带宽,提供一个公平的工作环境,在多媒体环境中,能保证音视频及时从磁盘中读取数据,是当前内核默认的调度器
我们可以通过内核传参的方式指定使用的调度算法: kernel elevator=deadline
或者,使用如下命令改变内核调度算法:
echo SCHEDULER > /sys/block/DEVICE/queue/scheduler二、块设备结构介绍
2.1 内核自带可参考的块设备驱动源码
drivers\\block\\z2ram.c
drivers\\block\\xd.c
\\drivers\\mmc\\host\\sdhci-s3c.c
2.2 块设备注册与注销函数
1. 注册函数
| int register_blkdev(unsigned int major, const char *name) |
函数功能介绍: 注册一个新的块设备
函数参数介绍:
@major:块设备的主设备号[1..255]。 如果major = 0,表示尝试分配未使用的主设备号,返回值就表示分配成功的主设备号。
@name:新块设备的名称。 注意: 名称必须保证在系统中是唯一的(不能与设备名称重名)。
注册示例:
| int Tiny4412_block_major = register_blkdev(0, "Tiny4412_block"); |
2. 注销函数
| void unregister_blkdev(unsigned int major, const char *name) |
函数工程介绍: 注销已注册的块设备。
函数参数介绍:
@major: 主设备号
@name: 设备名称
注销示例:
| unregister_blkdev(Tiny4412_block_major, "Tiny4412_block"); |
2.3 动态分配请求队列
| struct request_queue *blk_alloc_queue(gfp_t gfp_mask) |
函数功能介绍: 分配一个默认的请求队列,用该函数生成的请求队列没有设置默认的IO调度器,如果编写的块设备是内存模拟块设备或者是SD卡、Flash等设备,就可以用此函数分配请求队列。
函数参数介绍:
@ gfp_mask : 内存分配的方式。 GFP_KERNEL和GFP_ATOMIC,
GFP_ATOMIC: 用来从中断处理和进程上下文之外的其他代码中分配内存. 从不睡眠
GFP_KERNEL: 内核内存的正常分配. 可能睡眠
分配请求队列示例:
| struct request_queue *queue= =blk_alloc_queue(GFP_KERNEL); |
卸载驱动时,可以通过kfree释放空间。
如果需要访问外部硬件,比如: 光盘、磁盘等外部物理设备时,要设置默认的调度器,可以调用blk_init_queue函数分配请求队列。
| struct request_queue *blk_init_queue(request_fn_proc *rfn, spinlock_t *lock) |
blk_init_queue()必须与blk_cleanup_queue()调用配对。
函数参数介绍:
@ rfn 是一个函数指针,类型为 typedef void (request_fn_proc) (struct request_queue *q);
@ lock 自旋锁
2.4 绑定请求队列
| void blk_queue_make_request(struct request_queue *q, make_request_fn *mfn) |
函数功能介绍: 绑定blk_alloc_queue函数到请求队列。
上一步介绍的blk_alloc_queue函数分配的请求队列,由于不会使用默认的IO调度器,其中的make_request_fn是没有赋值的,因为上层代码向请求队列发生请求时都是通过make_request_fn这个函数来完成的。对于上层代码发出的请求,可以直接用make_request_fn函数来完成请求并直接将结果返回给上层的代码。
函数参数介绍:
struct request_queue *q :请求队列指针。
make_request_fn *mfn : make_request_fn函数指针。
函数指针的原型如下:
| typedef void (make_request_fn) (struct request_queue *q, struct bio *bio); |
该函数指针在Blkdev.h定义。

绑定请求队列示例:
| blk_queue_make_request(queue, Tiny4412_block_make_request); |
2.5 make_request_fn处理函数编写
| //直接提交请求,队列处理 static void Tiny4412_block_make_request(struct request_queue *q, struct bio *bio) { int i; struct bio_vec *bvec; sector_t sector = bio->bi_sector; /*通过for循环遍历一个bio中所有的segment请求*/ bio_for_each_segment(bvec, bio, i) { char *buffer = __bio_kmap_atomic(bio, i, KM_USER0); /*映射内存空间(申请空间)*/ Tiny4412_block_dev_sector_read_write(sector, bio_cur_bytes(bio)>>9 ,buffer, bio_data_dir(bio) == WRITE); /* sector: 当前扇区位置 bio_cur_bytes(bio)>>9: 扇区读写数量 buffer :读写的缓冲区指针首地址 bio_data_dir(bio): 判断是读还是写 */ sector += bio_cur_bytes(bio)>>9; /*偏移扇区*/ __bio_kunmap_atomic(bio, KM_USER0); /*取消映射(释放空间)*/ } bio_endio(bio, 0); /*结束处理*/ return; } |
make_request_fn函数指针传入的参数介绍:
struct bio *bio: 描述块数据传送时怎样完成填充或读取块给driver
struct request_queue *q :传入的请求队列
2.6 扇区读写函数实现
代码示例:
| unsigned long sector: 当前扇区位置 unsigned long nsect : 扇区读写数量 char *buffer : 读写的缓冲区指针 int write : 是读还是写 */ static void Tiny4412_block_dev_sector_read_write(unsigned long sector,unsigned long nsect, char *buffer, int write) { /*块设备最小单位是一个扇区,一个扇区的字节数是512字节*/ unsigned long offset = sector*512; unsigned long nbytes = nsect*512; if((offset + nbytes)>TINY4412_BLKDEV_BYTES) { printk(KERN_NOTICE "写超出范围,强制结束(%ld %ld)\\n", offset, nbytes); return; } if(write) /*为真,表示是写*/ memcpy(tiny4412_blkdev_data + offset, buffer, nbytes); else /*读操作*/ memcpy(buffer,tiny4412_blkdev_data + offset, nbytes); } |
2.7 分配一个gendisk结构
| struct gendisk *alloc_disk(int minors) //动态分配gendisk void del_gendisk(struct gendisk *disk) //注销gendisk |
函数功能介绍:每个块设备都对应一个gendisk结构,函数alloc_disk用于分配一个gendisk结构。
函数参数介绍:
@minors: 数量
给分配的结构填充参数:
| /*动态分配次设备号结构*/ gd=alloc_disk(1);/*分配一个gendisk,1表示不能进行分区,只能固定一个分区。 >1表示支持分区的数量 分区可以通过fdsik命令进行操作*/ gd->major=Tiny4412_block_major; /*主设备号*/ gd->first_minor=0; /*次设备号*/ gd->fops=&Tiny4412_block_ops; /*文件操作集合*/ gd->queue=queue; /*将请求队列关联到gendisk结构*/ snprintf(gd->disk_name, 32, "Tiny4412_block_%c",'a'); //设置磁盘名称,在/dev下可以查看该名称 //块设备基本都是使用文件系统函数进行操作,该文件操作集合可以不用自己实现 static struct block_device_operations Tiny4412_block_ops= { .owner = THIS_MODULE, }; |
驱动安装之后,查看的节点信息:

设置磁盘的容量
| /*注意: 块设备的大小使用扇区作为单位设置,而扇区的大小默认是512字节。 cat /sys/block/xxxx/size 可以查看到设置的大小 把字节为单位的大小转换为以扇区为单位时,我们需要除以512,或者右移9位 */ set_capacity(gd,TINY4412_BLKDEV_BYTES>>9); |
2.8 添加磁盘分区信息到内核
| void add_disk(struct gendisk *disk) |
函数功能介绍: 将分区信息添加到内核。
函数参数: 填充好gendisk结构。
示例:
| add_disk(gd); |
12.9 初始化一个请求队列
| struct request_queue *blk_init_queue(request_fn_proc *rfn, spinlock_t *lock) |
示例:
| tiny4412_blockdev_queue = blk_init_queue(do_tiny4412_blockdev_request, &tiny4412_blockdev_lock); |
该函数里调用了默认的IO调度器。 代码可以参考内核文件: drivers\\block\\z2ram.c
三、块设备示例代码
3.1 内存模拟块设备(不使用IO调度器)
内存空间采用vmalloc函数进行分配。
#include <linux/module.h>
#include <linux/blkdev.h>
#include <linux/hdreg.h>
#include <linux/version.h>
/*
* insmod tiny4412_blkdev.ko
* # or insmod tiny4412_blkdev.ko size=numK/M/G/T
* fdisk /dev/tiny4412_blkdev # create 2 patitions
* mkfs.ext2 /dev/tiny4412_blkdev1
* mkfs.ext2 /dev/tiny4412_blkdev2
* mount /dev/tiny4412_blkdev1 /mnt/temp1/
* mount /dev/tiny4412_blkdev2 /mnt/temp2/
* # play in /mnt/temp1/ and /mnt/temp2/
* umount /mnt/temp1/
* umount /mnt/temp2/
* rmmod tiny4412_blkdev.ko
*
*/
static int Tiny4412_block_major=0;
static struct request_queue *tiny4412_blkdev_queue;
static struct gendisk *tiny4412_blkdev_disk;
static unsigned long long tiny4412_blkdev_bytes=1024*1024*10;//10M--空间容量
#define TINY4412_BLKDEV_BYTES_1 (1024*1024*10) /*设置块设备的大小*/
static unsigned char tiny4412_blkdev_data_1[TINY4412_BLKDEV_BYTES_1]; /*用于测试块设备的数组大小*/
/*
* Handle an I/O request.
* 实现扇区的读写
unsigned long sector: 当前扇区位置
unsigned long nsect : 扇区读写数量
char *buffer : 读写的缓冲区指针
int write : 是读还是写
*/
static void Tiny4412_block_dev_sector_read_write(unsigned long sector,unsigned long nsect, char *buffer, int write)
{
/*块设备最小单位是一个扇区,一个扇区的字节数是512字节*/
unsigned long offset = sector; /*写入数据的位置*/
unsigned long nbytes = nsect; /*写入的长度*/
if((offset + nbytes)>TINY4412_BLKDEV_BYTES_1)
{
printk("写超出范围,强制结束(%ld %ld)\\n", offset, nbytes);
return;
}
if(write) /*为真,表示是写*/
memcpy(tiny4412_blkdev_data_1 + offset, buffer, nbytes);
else /*读操作*/
memcpy(buffer,tiny4412_blkdev_data_1 + offset, nbytes);
}
/*
处理请求
*/
static int tiny4412_blkdev_make_request(struct request_queue *q, struct bio *bio)
{
int dir;
unsigned long long dsk_offset;
struct bio_vec *bvec;
int i;
void *iovec_mem;
/*判断读写方向*/
if(bio_data_dir(bio) == WRITE) dir = 1;
else dir = 0;
dsk_offset = bio->bi_sector << 9;
bio_for_each_segment(bvec, bio, i)
{
iovec_mem = kmap(bvec->bv_page) + bvec->bv_offset;
//起始位置,长度,源数据,方向
Tiny4412_block_dev_sector_read_write(dsk_offset,bvec->bv_len,iovec_mem,dir);
kunmap(bvec->bv_page);
dsk_offset += bvec->bv_len;
}
bio_endio(bio, 0);
return 0;
}
static int tiny4412_blockdev_getgeo(struct block_device *bdev, struct hd_geometry *geo)
{
/* 容量=heads*cylinders*sectors*512
* 存储容量 = 磁头数 × 磁道(柱面)数 × 每道扇区数 × 每扇区字节数
*/
geo->heads = 2; /*磁头(一般一个盘面有两个磁头,正面一个/反面一个)*/
geo->cylinders = 32; /*柱面(一般一个盘面上有32个柱面)每个盘片32个磁道)*/
geo->sectors = TINY4412_BLKDEV_BYTES_1/2/32/512; /*扇区,一般每个磁道上有12个扇区,这里需要根据前面柱面和磁头进行计算,不能乱填*/
return 0;
}
struct block_device_operations tiny4412_blkdev_fops =
{
.owner= THIS_MODULE,
/*fdisk命令分区时需要调用该函数,用于读取磁头、柱面、扇区等信息*/
.getgeo = tiny4412_blockdev_getgeo,
};
static int __init tiny4412_blkdev_init(void)
{
/*动态分配请求队列*/
tiny4412_blkdev_queue = blk_alloc_queue(GFP_KERNEL);
/*绑定请求队列*/
blk_queue_make_request(tiny4412_blkdev_queue,tiny4412_blkdev_make_request);
/*动态分配次设备号结构*/
/*每一个磁盘(分区)都是使用一个gendisk结构保存*/
tiny4412_blkdev_disk = alloc_disk(64);
/*磁盘名称赋值*/
strcpy(tiny4412_blkdev_disk->disk_name, "tiny4412_blkdev");
/*注册一个块设备,自动分配主设备号*/
Tiny4412_block_major = register_blkdev(0,"Tiny4412_block");
printk("Tiny4412_block_major=%d\\n",Tiny4412_block_major);
tiny4412_blkdev_disk->major=Tiny4412_block_major; /*主设备号*/
tiny4412_blkdev_disk->first_minor = 0; /*次设备号*/
tiny4412_blkdev_disk->fops = &tiny4412_blkdev_fops; /*文件操作结合*/
tiny4412_blkdev_disk->queue = tiny4412_blkdev_queue; /*处理数据请求的队列*/
/*设置磁盘结构 capacity 的容量*/
/*注意: 块设备的大小使用扇区作为单位设置,而扇区的大小默认是512字节。
cat /sys/block/xxxx/size 可以查看到设置的大小
把字节为单位的大小转换为以扇区为单位时,我们需要除以512,或者右移9位
*/
set_capacity(tiny4412_blkdev_disk,tiny4412_blkdev_bytes>>9);
//添加磁盘信息到内核
add_disk(tiny4412_blkdev_disk);
return 0;
}
static void __exit tiny4412_blkdev_exit(void)
{
//删除磁盘
del_gendisk(tiny4412_blkdev_disk);
put_disk(tiny4412_blkdev_disk);
//清除队列
blk_cleanup_queue(tiny4412_blkdev_queue);
/*注销块设备*/
unregister_blkdev(Tiny4412_block_major, "Tiny4412_block");
}
module_init(tiny4412_blkdev_init);
module_exit(tiny4412_blkdev_exit);
MODULE_LICENSE("GPL");
块设备操作过程:
| [root@wbyq code]#ls tiny4412_block_device.ko [root@wbyq code]#insmod tiny4412_block_device.ko [ 154.950000] Tiny4412_block_major=253 [ 154.955000] tiny4412_blkdev: unknown partition table (因为使用的内存设备模拟块设备,数组里没有分区表,所以第一次安装设备时,读取不到设备分区表,这个提示是正常的) [root@wbyq code]#fdisk /dev/tiny4412_blkdev Device contains neither a valid DOS partition table, nor Sun, SGI, OSF or GPT disklabel Building a new DOS disklabel. Changes will remain in memory only, until you decide to write them. After that the previous content won't be recoverable. Command (m for help): n (n表示新建分区表) Command action e extended(表示扩展分区) p primary partition (1-4)(表示主分区) p (选择p创建主分区) Partition number (1-4): 1 (创建的主分区编号为1) First cylinder (1-160, default 1): 1 (柱面起始位置设置为1, 1-160表示当前磁盘剩余的未分区的柱面范围为1-160) Last cylinder or +size or +sizeM or +sizeK (1-160, default 160): 100 (设置柱面的结束位置) Command (m for help): n (表示主分区) Command action e extended p primary partition (1-4) p (选择p创建主分区) Partition number (1-4): 2 (创建的主分区编号为2) First cylinder (101-160, default 101): 101 (柱面起始位置设置为101, 101-160表示当前磁盘剩余的未分区的柱面范围为101-160) Last cylinder or +size or +sizeM or +sizeK (101-160, default 160): 160 (设置柱面的结束位置) Command (m for help): p (打印当前的分区情况) Disk /dev/tiny4412_blkdev: 10 MB, 10485760 bytes (磁盘的总容量: M单位,字节单位) 2 heads, 64 sectors/track, 160 cylinders (一个共有2个磁头,每个柱面有64个扇区,160个柱面) (提示: 存储容量 = 磁头数 × 磁道(柱面)数 × 每道扇区数 × 每扇区字节数) Units = cylinders of 128 * 512 = 65536 bytes
Device Boot Start End Blocks Id System /dev/tiny4412_blkdev1 1 100 6368 83 Linux (分区1的信息) Partition 1 has different physical/logical endings: phys=(355, 1, 0) logical=(99, 1, 64) Partition 1 does not end on cylinder boundary /dev/tiny4412_blkdev2 101 160 3840 83 Linux (分区2的信息) Partition 2 has different physical/logical endings: phys=(415, 1, 0) logical=(159, 1, 64) Partition 2 does not end on cylinder boundary Command (m for help): w (w表示保存分区表,写入磁盘,并退出fdisk命令行) The partition table has been altered. (提示,分区表示已经更改) Calling ioctl() to re-read partition table (调用ioctl()重新读取分区表) [ 218.905000] tiny4412_blkdev: tiny4412_blkdev1 tiny4412_blkdev2 (提示分区之后创建成功的设备节点) [root@wbyq code]#ls /dev/tiny4412_blkdev* -l (查看/dev下分区成功的设备节点) brw-rw---- 1 root root 253, 0 Nov 24 2018 /dev/tiny4412_blkdev brw-rw---- 1 root root 253, 1 Nov 24 2018 /dev/tiny4412_blkdev1 brw-rw---- 1 root root 253, 2 Nov 24 2018 /dev/tiny4412_blkdev2 [root@wbyq code]#mkfs.ext2 /dev/tiny4412_blkdev1 (给第一个设备分区进行格式化文件系统) Filesystem label= OS type: Linux Block size=1024 (log=0) Fragment size=1024 (log=0) 1592 inodes, 6368 blocks 318 blocks (5%) reserved for the super user First data block=1 Maximum filesystem blocks=262144 1 block groups 8192 blocks per group, 8192 fragments per group 1592 inodes per group [root@wbyq code]#mkfs.ext2 /dev/tiny4412_blkdev2(给第二个设备分区进行格式化文件系统) Filesystem label= OS type: Linux Block size=1024 (log=0) Fragment size=1024 (log=0) 960 inodes, 3840 blocks 192 blocks (5%) reserved for the super user First data block=1 Maximum filesystem blocks=262144 1 block groups 8192 blocks per group, 8192 fragments per group 960 inodes per group [root@wbyq code]#mount /dev/tiny4412_blkdev1 /mnt/ (将第一个分区挂载到/mnt目录下) [root@wbyq code]#mount /dev/tiny4412_blkdev2 /tmp/ (将第二个分区挂载到/mnt目录下) [root@wbyq code]#df -h (查看当前系统磁盘的信息) Filesystem Size Used Available Use% Mounted on 192.168.10.11:/work/rootfs/ 48.1G 16.5G 29.1G 36% / /dev/tiny4412_blkdev1 6.0M 13.0K 5.7M 0% /mnt /dev/tiny4412_blkdev2 3.6M 13.0K 3.4M 0% /tmp /*下面就是分别进入到挂载的目录下进行文件拷贝操作,测试块设备是否正常,最后在取消挂载退出*/ [root@wbyq code]#cd /mnt/ [root@wbyq mnt]#ls lost+found [root@wbyq mnt]#cp /123.mp3 ./ [root@wbyq mnt]# [root@wbyq mnt]#cd /tmp/ [root@wbyq tmp]#cp /123.mp3 ./ [root@wbyq tmp]# [root@wbyq tmp]#ls 123.mp3 lost+found [root@wbyq tmp]#cd / [root@wbyq ]#umount /tmp/ [root@wbyq ]#umount /mnt/ |
3.2 使用SD卡编写块设备(不使用IO调度器)
SD卡采用SPI协议通信,底层采用模拟的SPI系统,没有使用SPI子系统。

#include <linux/module.h>
#include <linux/moduleparam.h>
#include <linux/init.h>
#include <linux/sched.h>
#include <linux/kernel.h>
#include <linux/slab.h>
#include <linux/fs.h> /* everything... */
#include <linux/errno.h> /* error codes */
#include <linux/timer.h>
#include <linux/types.h> /* size_t */
#include <linux/fcntl.h> /* O_ACCMODE */
#include <linux/hdreg.h> /* HDIO_GETGEO */
#include <linux/kdev_t.h>
#include <linux/vmalloc.h>
#include <linux/genhd.h>
#include <linux/blkdev.h>
#include <linux/bio.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/ioctl.h>
#include <linux/fs.h>
#include <linux/device.h>
#include <linux/err.h>
#include <linux/list.h>
#include <linux/errno.h>
#include <linux/mutex.h>
#include <linux/slab.h>
#include <linux/compat.h>
#include <linux/spi/spi.h>
#include <linux/spi/spidev.h>
#include <asm/uaccess.h>
#include <linux/gpio.h>
#include <mach/gpio.h>
#include <plat/gpio-cfg.h>
#include <linux/delay.h>
#include <linux/io.h>
#include <linux/mutex.h>
#include <linux/miscdevice.h> /*杂项字符设备头文件*/
/*--------------------------------SD相关操作代码---------------------------------------------*/
/*定义指针,用于接收虚拟地址*/
volatile unsigned int *SD_GPBCON;
volatile unsigned int *SD_GPBDAT;
/*
函数功能:SD初始化
Tiny4412硬件连接:
DO--MISO :GPB_2
DI--MOSI :GPB_3
CLK-SCLK :GPB_0
CS--CS :GPB_1
*/
void SDCardSpiInit(void)
{
/*1. 初始化GPIO*/
/*映射物理地址*/
SD_GPBCON=ioremap(0x11400040,4);
SD_GPBDAT=ioremap(0x11400044,4);
*SD_GPBCON &= ~(0xf << 0 * 4);*SD_GPBCON |= (0x1 << 0 * 4);
*SD_GPBCON &= ~(0xf << 1 * 4);*SD_GPBCON |= (0x1 << 1 * 4);
*SD_GPBCON &= ~(0xf << 2 * 4);
*SD_GPBCON &= ~(0xf << 3 * 4);*SD_GPBCON |= (0x1 << 3 * 4);
/*2. 上拉GPIO口*/
//*SD_GPBDAT &= ~(1 << 4);//输出0
*SD_GPBDAT |= (1 << 0); //输出1
*SD_GPBDAT |= (1 << 1); //输出1
*SD_GPBDAT |= (1 << 3); //输出1
}
// SD卡类型定义
#define SDCard_TYPE_ERR 0X00 //卡类型错误
#define SDCard_TYPE_MMC 0X01 //MMC卡
#define SDCard_TYPE_V1 0X02
#define SDCard_TYPE_V2 0X04
#define SDCard_TYPE_V2HC 0X06
// SD卡指令表
#define SDCard_CMD0 0 //卡复位
#define SDCard_CMD1 1
#define SDCard_CMD8 8 //命令8 ,SEND_IF_COND
#define SDCard_CMD9 9 //命令9 ,读CSD数据
#define SDCard_CMD10 10 //命令10,读CID数据
#define SDCard_CMD12 12 //命令12,停止数据传输
#define SDCard_CMD13 16 //命令16,设置扇区大小 应返回0x00
#define SDCard_CMD17 17 //命令17,读扇区
#define SDCard_CMD18 18 //命令18,读Multi 扇区
#define SDCard_CMD23 23 //命令23,设置多扇区写入前预先擦除N个block
#define SDCard_CMD24 24 //命令24,写扇区
#define SDCard_CMD25 25 //命令25,写多个扇区
#define SDCard_CMD41 41 //命令41,应返回0x00
#define SDCard_CMD55 55 //命令55,应返回0x01
#define SDCard_CMD58 58 //命令58,读OCR信息
#define SDCard_CMD59 59 //命令59,使能/禁止CRC,应返回0x00、
/*SD卡回应标记字*/
#define SDCard_RESPONSE_NO_ERROR 0x00 //正确回应
#define SDCard_SD_IN_IDLE_STATE 0x01 //闲置状态
#define SDCard_SD_ERASE_RESET 0x02 //擦除复位
#define SDCard_RESPONSE_FAILURE 0xFF //响应失败
//函数声明
unsigned char SDCardReadWriteOneByte(unsigned char data); //底层接口,SPI读写字节函数
unsigned char SDCardWaitBusy(void); //等待SD卡准备
unsigned char SDCardGetAck(unsigned char Response); //获得应答
unsigned char SDCardDeviceInit(void); //初始化
unsigned char SDCardReadData(unsigned char*buf,unsigned int sector,unsigned int cnt); //读块(扇区)
unsigned char SDCardWriteData(unsigned char*buf,unsigned int sector,unsigned int cnt); //写块(扇区)
unsigned int GetSDCardSectorCount(void); //读扇区数
unsigned char GetSDCardCISDCardOutnfo(unsigned char *cid_data); //读SD卡CID
unsigned char GetSDCardCSSDCardOutnfo(unsigned char *csd_data); //读SD卡CSD
static unsigned char SD_Type=0; //存放SD卡的类型
/*
函数功能:SD卡底层接口,通过SPI时序向SD卡读写一个字节
函数参数:data是要写入的数据
返 回 值:读到的数据
说明:时序是第二个上升沿采集数据
*/
unsigned char SDCardReadWriteOneByte(unsigned char data_tx)
{
u8 data_rx=0;
u8 i;
for(i=0;i<8;i++)
{
*SD_GPBDAT &= ~(1 << 0);//输出0
if(data_tx&0x80)*SD_GPBDAT |= (1 << 3); //输出1
else *SD_GPBDAT &= ~(1 << 3);//输出0
data_tx<<=1; //继续发送下一个数据
*SD_GPBDAT |= (1 << 0); //输出1
data_rx<<=1;
if((*SD_GPBDAT & (1 << 2)))data_rx|=0x01;
}
return data_rx;
}
/*
函数功能:取消选择,释放SPI总线
*/
void SDCardCancelCS(void)
{
*SD_GPBDAT |= (1 << 1);
SDCardReadWriteOneByte(0xff);//提供额外的8个时钟
}
/*
函数 功 能:选择sd卡,并且等待卡准备OK
函数返回值:0,成功;1,失败;
*/
unsigned char SDCardSelectCS(void)
{
*SD_GPBDAT &= ~(1 << 1);
if(SDCardWaitBusy()==0)return 0;//等待成功
SDCardCancelCS();
return 1;//等待失败
}
/*
函数 功 能:等待卡准备好
函数返回值:0,准备好了;其他,错误代码
*/
unsigned char SDCardWaitBusy(void)
{
unsigned int t=0;
do
{
if(SDCardReadWriteOneByte(0XFF)==0XFF)return 0;//OK
t++;
}while(t<0xFFFFFF);//等待
return 1;
}
/*
函数功能:等待SD卡回应
函数参数:
Response:要得到的回应值
返 回 值:
0,成功得到了该回应值
其他,得到回应值失败
*/
unsigned char SDCardGetAck(unsigned char Response)
{
u16 Count=0xFFFF;//等待次数
while((SDCardReadWriteOneByte(0XFF)!=Response)&&Count)Count--;//等待得到准确的回应
if(Count==0)return SDCard_RESPONSE_FAILURE;//得到回应失败
else return SDCard_RESPONSE_NO_ERROR;//正确回应
}
/*
函数功能:从sd卡读取一个数据包的内容
函数参数:
buf:数据缓存区
len:要读取的数据长度.
返回值:
0,成功;其他,失败;
*/
unsigned char SDCardRecvData(unsigned char*buf,u16 len)
{
if(SDCardGetAck(0xFE))return 1;//等待SD卡发回数据起始令牌0xFE
while(len--)//开始接收数据
{
*buf=SDCardReadWriteOneByte(0xFF);
buf++;
}
//下面是2个伪CRC(dummy CRC)
SDCardReadWriteOneByte(0xFF);
SDCardReadWriteOneByte(0xFF);
return 0;//读取成功
}
/*
函数功能:向sd卡写入一个数据包的内容 512字节
函数参数:
buf 数据缓存区
cmd 指令
返 回 值:0表示成功;其他值表示失败;
*/
unsigned char SDCardSendData(unsigned char*buf,unsigned char cmd)
{
u16 t;
if(SDCardWaitBusy())return 1; //等待准备失效
SDCardReadWriteOneByte(cmd);
if(cmd!=0XFD)//不是结束指令
{
for(t=0;t<512;t++)SDCardReadWriteOneByte(buf[t]);//提高速度,减少函数传参时间
SDCardReadWriteOneByte(0xFF); //忽略crc
SDCardReadWriteOneByte(0xFF);
t=SDCardReadWriteOneByte(0xFF); //接收响应
if((t&0x1F)!=0x05)return 2; //响应错误
}
return 0;//写入成功
}
/*
函数功能:向SD卡发送一个命令
函数参数:
unsigned char cmd 命令
unsigned int arg 命令参数
unsigned char crc crc校验值
返回值:SD卡返回的响应
*/
unsigned char SendSDCardCmd(unsigned char cmd, unsigned int arg, unsigned char crc)
{
unsigned char r1;
unsigned char Retry=0;
SDCardCancelCS(); //取消上次片选
if(SDCardSelectCS())return 0XFF;//片选失效
//发送数据
SDCardReadWriteOneByte(cmd | 0x40);//分别写入命令
SDCardReadWriteOneByte(arg >> 24);
SDCardReadWriteOneByte(arg >> 16);
SDCardReadWriteOneByte(arg >> 8);
SDCardReadWriteOneByte(arg);
SDCardReadWriteOneByte(crc);
if(cmd==SDCard_CMD12)SDCardReadWriteOneByte(0xff);//Skip a stuff byte when stop reading
Retry=0X1F;
do
{
r1=SDCardReadWriteOneByte(0xFF);
}while((r1&0X80) && Retry--); //等待响应,或超时退出
return r1; //返回状态值
}
/*
函数功能:获取SD卡的CID信息,包括制造商信息
函数参数:unsigned char *cid_data(存放CID的内存,至少16Byte)
返 回 值:
0:成功,1:错误
*/
unsigned char GetSDCardCISDCardOutnfo(unsigned char *cid_data)
{
unsigned char r1;
//发SDCard_CMD10命令,读CID
r1=SendSDCardCmd(SDCard_CMD10,0,0x01);
if(r1==0x00)
{
r1=SDCardRecvData(cid_data,16);//接收16个字节的数据
}
SDCardCancelCS();//取消片选
if(r1)return 1;
else return 0;
}
/*
函数说明:
获取SD卡的CSD信息,包括容量和速度信息
函数参数:
unsigned char *cid_data(存放CID的内存,至少16Byte)
返 回 值:
0:成功,1:错误
*/
unsigned char GetSDCardCSSDCardOutnfo(unsigned char *csd_data)
{
unsigned char r1;
r1=SendSDCardCmd(SDCard_CMD9,0,0x01); //发SDCard_CMD9命令,读CSD
if(r1==0)
{
r1=SDCardRecvData(csd_data, 16);//接收16个字节的数据
}
SDCardCancelCS();//取消片选
if(r1)return 1;
else return 0;
}
/*
函数功能:获取SD卡的总扇区数(扇区数)
返 回 值:
0表示容量检测出错,其他值表示SD卡的容量(扇区数/512字节)
说 明:
每扇区的字节数必为512字节,如果不是512字节,则初始化不能通过.
*/
unsigned int GetSDCardSectorCount(void)
{
unsigned char csd[16];
unsigned int Capacity;
unsigned char n;
u16 csize;
if(GetSDCardCSSDCardOutnfo(csd)!=0) return 0; //取CSD信息,如果期间出错,返回0
if((csd[0]&0xC0)==0x40) //V2.00的卡,如果为SDHC卡,按照下面方式计算
{
csize = csd[9] + ((u16)csd[8] << 8) + 1;
Capacity = (unsigned int)csize << 10;//得到扇区数
}
else//V1.XX的卡
{
n = (csd[5] & 15) + ((csd[10] & 128) >> 7) + ((csd[9] & 3) << 1) + 2;
csize = (csd[8] >> 6) + ((u16)csd[7] << 2) + ((u16)(csd[6] & 3) << 10) + 1;
Capacity= (unsigned int)csize << (n - 9);//得到扇区数
}
return Capacity;
}
/*
函数功能: 初始化SD卡
返 回 值: 非0表示初始化失败!
*/
unsigned char SDCardDeviceInit(void)
{
unsigned char r1; // 存放SD卡的返回值
u16 retry; // 用来进行超时计数
unsigned char buf[4];
u16 i;
SDCardSpiInit(); //初始化底层IO口
for(i=0;i<10;i++)SDCardReadWriteOneByte(0XFF); //发送最少74个脉冲
retry=20;
do
{
r1=SendSDCardCmd(SDCard_CMD0,0,0x95);//进入IDLE状态 闲置
}while((r1!=0X01) && retry--);
SD_Type=0; //默认无卡
if(r1==0X01)
{
if(SendSDCardCmd(SDCard_CMD8,0x1AA,0x87)==1) //SD V2.0
{
for(i=0;i<4;i++)buf[i]=SDCardReadWriteOneByte(0XFF); //Get trailing return value of R7 resp
if(buf[2]==0X01&&buf[3]==0XAA) //卡是否支持2.7~3.6V
{
retry=0XFFFE;
do
{
SendSDCardCmd(SDCard_CMD55,0,0X01); //发送SDCard_CMD55
r1=SendSDCardCmd(SDCard_CMD41,0x40000000,0X01);//发送SDCard_CMD41
}while(r1&&retry--);
if(retry&&SendSDCardCmd(SDCard_CMD58,0,0X01)==0)//鉴别SD2.0卡版本开始
{
for(i=0;i<4;i++)buf[i]=SDCardReadWriteOneByte(0XFF);//得到OCR值
if(buf[0]&0x40)SD_Type=SDCard_TYPE_V2HC; //检查CCS
else SD_Type=SDCard_TYPE_V2;
}
}
}
else//SD V1.x/ MMC V3
{
SendSDCardCmd(SDCard_CMD55,0,0X01); //发送SDCard_CMD55
r1=SendSDCardCmd(SDCard_CMD41,0,0X01); //发送SDCard_CMD41
if(r1<=1)
{
SD_Type=SDCard_TYPE_V1;
retry=0XFFFE;
do //等待退出IDLE模式
{
SendSDCardCmd(SDCard_CMD55,0,0X01); //发送SDCard_CMD55
r1=SendSDCardCmd(SDCard_CMD41,0,0X01);//发送SDCard_CMD41
}while(r1&&retry--);
}
else//MMC卡不支持SDCard_CMD55+SDCard_CMD41识别
{
SD_Type=SDCard_TYPE_MMC;//MMC V3
retry=0XFFFE;
do //等待退出IDLE模式
{
r1=SendSDCardCmd(SDCard_CMD1,0,0X01);//发送SDCard_CMD1
}while(r1&&retry--);
}
if(retry==0||SendSDCardCmd(SDCard_CMD13,512,0X01)!=0)SD_Type=SDCard_TYPE_ERR;//错误的卡
}
}
SDCardCancelCS(); //取消片选
if(SD_Type)return 0; //初始化成功返回0
else if(r1)return r1; //返回值错误值
return 0xaa; //其他错误
}
/*
函数功能:读SD卡
函数参数:
buf:数据缓存区
sector:扇区
cnt:扇区数
返回值:
0,ok;其他,失败.
说 明:
SD卡一个扇区大小512字节
*/
unsigned char SDCardReadData(unsigned char*buf,unsigned int sector,unsigned int cnt)
{
unsigned char r1;
if(SD_Type!=SDCard_TYPE_V2HC)sector<<=9;//转换为字节地址
if(cnt==1)
{
r1=SendSDCardCmd(SDCard_CMD17,sector,0X01);//读命令
if(r1==0) //指令发送成功
{
r1=SDCardRecvData(buf,512); //接收512个字节
}
}else
{
r1=SendSDCardCmd(SDCard_CMD18,sector,0X01);//连续读命令
do
{
r1=SDCardRecvData(buf,512);//接收512个字节
buf+=512;
}while(--cnt && r1==0);
SendSDCardCmd(SDCard_CMD12,0,0X01); //发送停止命令
}
SDCardCancelCS();//取消片选
return r1;//
}
/*
函数功能:向SD卡写数据
函数参数:
buf:数据缓存区
sector:起始扇区
cnt:扇区数
返回值:
0,ok;其他,失败.
说 明:
SD卡一个扇区大小512字节
*/
unsigned char SDCardWriteData(unsigned char*buf,unsigned int sector,unsigned int cnt)
{
unsigned char r1;
if(SD_Type!=SDCard_TYPE_V2HC)sector *= 512;//转换为字节地址
if(cnt==1)
{
r1=SendSDCardCmd(SDCard_CMD24,sector,0X01);//读命令
if(r1==0)//指令发送成功
{
r1=SDCardSendData(buf,0xFE);//写512个字节
}
}
else
{
if(SD_Type!=SDCard_TYPE_MMC)
{
SendSDCardCmd(SDCard_CMD55,0,0X01);
SendSDCardCmd(SDCard_CMD23,cnt,0X01);//发送指令
}
r1=SendSDCardCmd(SDCard_CMD25,sector,0X01);//连续读命令
if(r1==0)
{
do
{
r1=SDCardSendData(buf,0xFC);//接收512个字节
buf+=512;
}while(--cnt && r1==0);
r1=SDCardSendData(0,0xFD);//接收512个字节
}
}
SDCardCancelCS();//取消片选
return r1;//
}
/*
功能说明:
1. 支持文件系统格式化: #mkfs.ext2 /dev/tiny4412_block_a
2. 支持mount挂载: #mount /dev/tiny4412_block_a /mnt/
3. 支持磁盘大小查看: #cat /sys/block/Tiny4412_block_a/size
#df -h
*/
static struct request_queue *queue=NULL; /* 设备请求队列 */
static struct gendisk *gd; /* gendisk结构 */
static unsigned int sd_size=0; //存放SD卡返回的容量扇区数量单位(512字节)
static int Tiny4412_block_major = 0; /*存放主设备号*/
static DEFINE_MUTEX(sd_mutex); /*静态定义互斥锁*/
/*
* Handle an I/O request.
* 实现扇区的读写
*/
static void Tiny4412_block_dev_sector_read_write(unsigned long sector,unsigned long nsect, char *buffer, int write)
{
/*互斥锁,上锁*/
mutex_lock(&sd_mutex);
sector>>=9;
nsect>>=9;
/*块设备最以上是关于Linux驱动开发: 块设备驱动开发的主要内容,如果未能解决你的问题,请参考以下文章