Intel Realsense D435 C/C++调用code examples(附代码)(坑坑坑坑坑!!!)(opencv显示图片反色解决)
Posted Dontla
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Intel Realsense D435 C/C++调用code examples(附代码)(坑坑坑坑坑!!!)(opencv显示图片反色解决)相关的知识,希望对你有一定的参考价值。
https://dev.intelrealsense.com/docs/rs-hello-realsense
👆上面代码仅供参考,不要用它,要到👇下面下载source code源码
要先安装inter realsense SDK 2.0并下载source code

文章目录
rs-hello-realsense(C++)(调用摄像头显示中心深度距离)
Demonstrates the basics of connecting to a RealSense device and using depth data
realsense_test.cpp
#include <stdio.h>
#include <iostream>
#include <librealsense2/rs.hpp> // Include Intel RealSense Cross Platform API
int main() {
// Create a Pipeline - this serves as a top-level API for streaming and processing frames
rs2::pipeline p;
// Configure and start the pipeline
p.start();
// Block program until frames arrive
rs2::frameset frames = p.wait_for_frames();
// Try to get a frame of a depth image
rs2::depth_frame depth = frames.get_depth_frame();
// Get the depth frame's dimensions
float width = depth.get_width();
float height = depth.get_height();
// Query the distance from the camera to the object in the center of the image
float dist_to_center = depth.get_distance(width / 2, height / 2);
// Print the distance
std::cout << "The camera is facing an object " << dist_to_center << " meters away \\r";
return 0;
}
运行结果:
The camera is facing an object 3.602 meters away
Distance(C)(测试depth流)(SDK里少了example.h文件,搞不了[我勒个去,它没集成在安装包里面,要下source code才有这个文件])
Equivalent to hello-realsense but rewritten for C users
Intel® RealSense™ SDK 2.0 (v2.49.0)

直接把这个文件拷到项目工程文件夹下,跟.c文件放在一起
然后编译运行,一次成功(中间还有个小插曲,就是realsense2.dll文件是2.48的,但是最新的是要求2.49的,所以第一次运行没成功,把2.49的realsense2.dll拷过去就运行成功了)

realsense_test.c
// License: Apache 2.0. See LICENSE file in root directory.
// Copyright(c) 2017 Intel Corporation. All Rights Reserved.
/* Include the librealsense C header files */
#include <librealsense2/rs.h>
#include <librealsense2/h/rs_pipeline.h>
#include <librealsense2/h/rs_option.h>
#include <librealsense2/h/rs_frame.h>
#include "example.h"
#include <stdlib.h>
#include <stdint.h>
#include <stdio.h>
// These parameters are reconfigurable //
#define STREAM RS2_STREAM_DEPTH // rs2_stream is a types of data provided by RealSense device //
#define FORMAT RS2_FORMAT_Z16 // rs2_format identifies how binary data is encoded within a frame //
#define WIDTH 640 // Defines the number of columns for each frame or zero for auto resolve//
#define HEIGHT 0 // Defines the number of lines for each frame or zero for auto resolve //
#define FPS 30 // Defines the rate of frames per second //
#define STREAM_INDEX 0 // Defines the stream index, used for multiple streams of the same type //
int main()
{
rs2_error* e = 0;
// Create a context object. This object owns the handles to all connected realsense devices.
// The returned object should be released with rs2_delete_context(...)
rs2_context* ctx = rs2_create_context(RS2_API_VERSION, &e);
check_error(e);
/* Get a list of all the connected devices. */
// The returned object should be released with rs2_delete_device_list(...)
rs2_device_list* device_list = rs2_query_devices(ctx, &e);
check_error(e);
int dev_count = rs2_get_device_count(device_list, &e);
check_error(e);
printf("There are %d connected RealSense devices.\\n", dev_count);
if (0 == dev_count)
return EXIT_FAILURE;
// Get the first connected device
// The returned object should be released with rs2_delete_device(...)
rs2_device* dev = rs2_create_device(device_list, 0, &e);
check_error(e);
print_device_info(dev);
// Create a pipeline to configure, start and stop camera streaming
// The returned object should be released with rs2_delete_pipeline(...)
rs2_pipeline* pipeline = rs2_create_pipeline(ctx, &e);
check_error(e);
// Create a config instance, used to specify hardware configuration
// The retunred object should be released with rs2_delete_config(...)
rs2_config* config = rs2_create_config(&e);
check_error(e);
// Request a specific configuration
rs2_config_enable_stream(config, STREAM, STREAM_INDEX, WIDTH, HEIGHT, FORMAT, FPS, &e);
check_error(e);
// Start the pipeline streaming
// The retunred object should be released with rs2_delete_pipeline_profile(...)
rs2_pipeline_profile* pipeline_profile = rs2_pipeline_start_with_config(pipeline, config, &e);
if (e)
{
printf("The connected device doesn't support depth streaming!\\n");
exit(EXIT_FAILURE);
}
while (1)
{
// This call waits until a new composite_frame is available
// composite_frame holds a set of frames. It is used to prevent frame drops
// The returned object should be released with rs2_release_frame(...)
rs2_frame* frames = rs2_pipeline_wait_for_frames(pipeline, RS2_DEFAULT_TIMEOUT, &e);
check_error(e);
// Returns the number of frames embedded within the composite frame
int num_of_frames = rs2_embedded_frames_count(frames, &e);
check_error(e);
int i;
for (i = 0; i < num_of_frames; ++i)
{
// The retunred object should be released with rs2_release_frame(...)
rs2_frame* frame = rs2_extract_frame(frames, i, &e);
check_error(e);
// Check if the given frame can be extended to depth frame interface
// Accept only depth frames and skip other frames
if (0 == rs2_is_frame_extendable_to(frame, RS2_EXTENSION_DEPTH_FRAME, &e))
continue;
// Get the depth frame's dimensions
int width = rs2_get_frame_width(frame, &e);
check_error(e);
int height = rs2_get_frame_height(frame, &e);
check_error(e);
// Query the distance from the camera to the object in the center of the image
float dist_to_center = rs2_depth_frame_get_distance(frame, width / 2, height / 2, &e);
check_error(e);
// Print the distance
printf("The camera is facing an object %.3f meters away.\\n", dist_to_center);
rs2_release_frame(frame);
}
rs2_release_frame(frames);
}
// Stop the pipeline streaming
rs2_pipeline_stop(pipeline, &e);
check_error(e);
// Release resources
rs2_delete_pipeline_profile(pipeline_profile);
rs2_delete_config(config);
rs2_delete_pipeline(pipeline);
rs2_delete_device(dev);
rs2_delete_device_list(device_list);
rs2_delete_context(ctx);
return EXIT_SUCCESS;
}
运行结果:

Color(C)(测试color流)
Demonstrate how to stream color data and prints some frame information
realsense_test.c
// License: Apache 2.0. See LICENSE file in root directory.
// Copyright(c) 2017 Intel Corporation. All Rights Reserved.
/* Include the librealsense C header files */
#include <librealsense2/rs.h>
#include <librealsense2/h/rs_pipeline.h>
#include <librealsense2/h/rs_frame.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdio.h>
#include "example.h"
// These parameters are reconfigurable //
#define STREAM RS2_STREAM_COLOR // rs2_stream is a types of data provided by RealSense device //
#define FORMAT RS2_FORMAT_RGB8 // rs2_format identifies how binary data is encoded within a frame //
#define WIDTH 640 // Defines the number of columns for each frame //
#define HEIGHT 480 // Defines the number of lines for each frame //
#define FPS 30 // Defines the rate of frames per second //
#define STREAM_INDEX 0 // Defines the stream index, used for multiple streams of the same type //
int main()
{
rs2_error* e = 0;
// Create a context object. This object owns the handles to all connected realsense devices.
// The returned object should be released with rs2_delete_context(...)
rs2_context* ctx = rs2_create_context(RS2_API_VERSION, &e);
check_error(e);
/* Get a list of all the connected devices. */
// The returned object should be released with rs2_delete_device_list(...)
rs2_device_list* device_list = rs2_query_devices(ctx, &e);
check_error(e);
int dev_count = rs2_get_device_count(device_list, &e);
check_error(e);
printf("There are %d connected RealSense devices.\\n", dev_count);
if (0 == dev_count)
return EXIT_FAILURE;
// Get the first connected device
// The returned object should be released with rs2_delete_device(...)
rs2_device* dev = rs2_create_device(device_list, 0, &e);
check_error(e);
print_device_info(dev);
// Create a pipeline to configure, start and stop camera streaming
// The returned object should be released with rs2_delete_pipeline(...)
rs2_pipeline* pipeline = rs2_create_pipeline(ctx, &e);
check_error(e);
// Create a config instance, used to specify hardware configuration
// The retunred object should be released with rs2_delete_config(...)
rs2_config* config = rs2_create_config(&e);
check_error(e);
// Request a specific configuration
rs2_config_enable_stream(config, STREAM, STREAM_INDEX, WIDTH, HEIGHT, FORMAT, FPS, &e);
check_error(e);
// Start the pipeline streaming
// The retunred object should be released with rs2_delete_pipeline_profile(...)
rs2_pipeline_profile* pipeline_profile = rs2_pipeline_start_with_config(pipeline, config, &e);
if (e)
{
printf("The connected device doesn't support color streaming!\\n");
exit(EXIT_FAILURE);
}
while (1)
{
// This call waits until a new composite_frame is available
// composite_frame holds a set of frames. It is used to prevent frame drops
// The returned object should be released with rs2_release_frame(...)
rs2_frame* frames = rs2_pipeline_wait_for_frames(pipeline, RS2_DEFAULT_TIMEOUT, &e);
check_error(e);
// Returns the number of frames embedded within the composite frame
int num_of_frames = rs2_embedded_frames_count(frames, &e);
check_error(e);
int i;
for (i = 0; i < num_of_frames; ++i)
{
// The retunred object should be released with rs2_release_frame(...)
rs2_frame* frame = rs2_extract_frame(frames, i, &e);
check_error(e);
const uint8_t* rgb_frame_data = (const uint8_t*)(rs2_get_frame_data(frame, &e));
check_error(e);
unsigned long long frame_number = rs2_get_frame_number(frame, &e);
check_error(e);
rs2_time_t frame_timestamp = rs2_get_frame_timestamp(frame, &e);
check_error(e);
// Specifies the clock in relation to which the frame timestamp was measured
rs2_timestamp_domain frame_timestamp_domain = rs2_get_frame_timestamp_domain(frame, &e);
check_error(e);
const char* frame_timestamp_domain_str = rs2_timestamp_domain_to_string(frame_timestamp_domain);
rs2_metadata_type frame_metadata_time_of_arrival = rs2_get_frame_metadata(frame, RS2_FRAME_METADATA_TIME_OF_ARRIVAL, &e);
check_error(e);
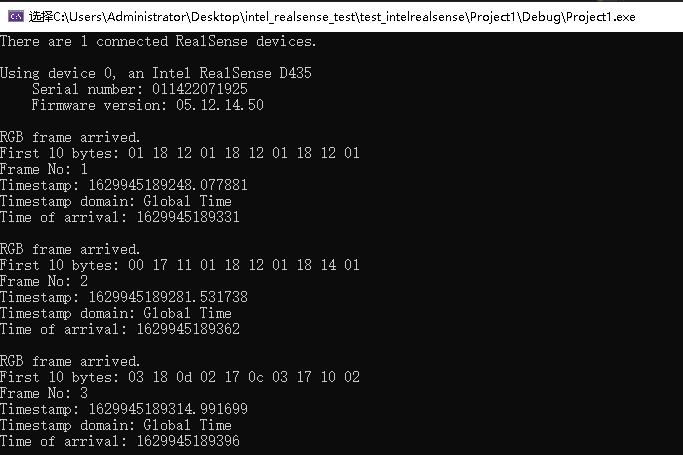
printf("RGB frame arrived.\\n");
printf("First 10 bytes: ");
int i;
for (i = 0; i < 10; ++i)
printf("%02x ", rgb_frame_data[i]);
printf("\\nFrame No: %llu\\n", frame_number);
printf("Timestamp: %f\\n", frame_timestamp);
printf("Timestamp domain: %s\\n", frame_timestamp_domain_str);
printf("Time of arrival: %lld\\n\\n", frame_metadata_time_of_arrival);
rs2_release_frame(frame);
}
rs2_release_frame(frames);
}
// Stop the pipeline streaming
rs2_pipeline_stop(pipeline, &e);
check_error(e);
// Release resources
rs2_delete_pipeline_profile(pipeline_profile);
rs2_delete_config(config);
rs2_delete_pipeline(pipeline);
rs2_delete_device(dev);
rs2_delete_device_list(device_list);
rs2_delete_context(ctx);
return EXIT_SUCCESS;
}
运行结果:
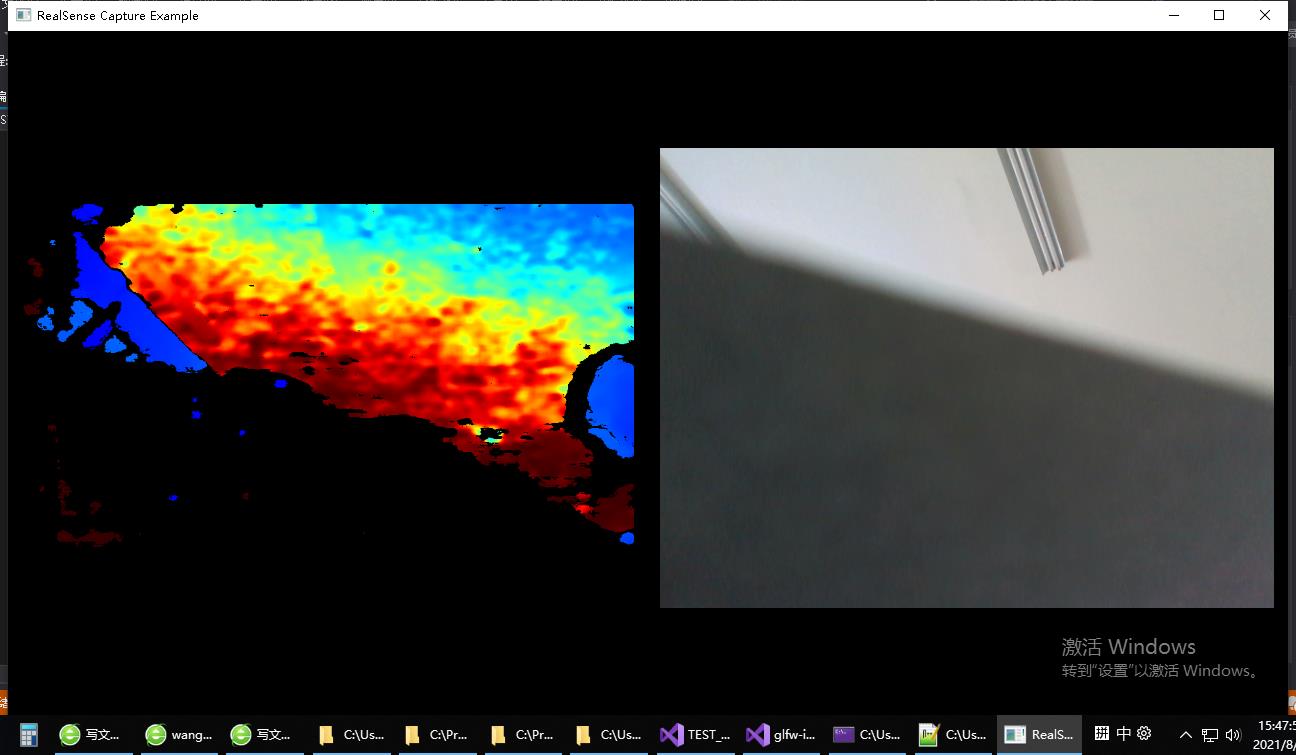
Capture(C++)(显示color和depth图)(裂开,官方给的要引用的库还得自己编译!)(还有不要用官网上那个不全的代码,要用source code里的代码!)
Shows how to synchronize and render multiple streams: left, right, depth and RGB streams
example.hpp不能直接拷贝到源码文件夹下,要指定路径引用
裂开,各种报错
不用安装包的文件了,直接用source code

悄悄告诉你,文件夹名字为include的极有可能是需要你包含的。。。😅,,,比如这个

经过同事的点拨,终于知道为啥报错了,因为还有一些关于其他比如opencv的头文件、库没包含进去。。。
要把这三文件里的内容都给加进去,为了方便,就不手动添加了,直接把这三加进属性表管理器里(添加顺序没有要求!)
然后编译还是不行,报错!
通过报错的情况来看,应该跟glfw这玩意有关

在SDK中找到第三方库,发现这货居然没编译(没有生成.lib或.dll文件)

幸好它有工程项目文件,打开它直接用VS编译
编译后生成了glfw-imgui.lib文件
把它的文件名和它所在的目录分别添加到属性页的输入-附加依赖项和常规-附加库目录中
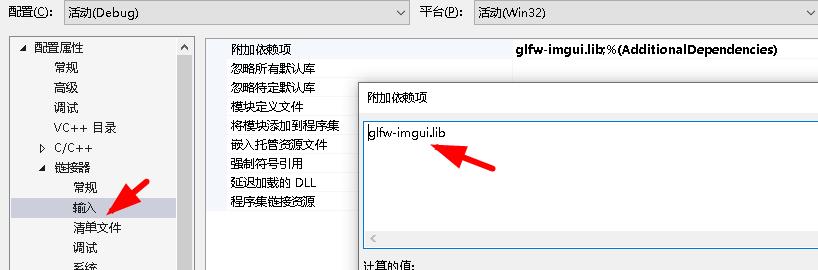

然后编译运行程序,大功告成
// License: Apache 2.0. See LICENSE file in root directory.
// Copyright(c) 2017 Intel Corporation. All Rights Reserved.
#include <librealsense2/rs.hpp> // Include RealSense Cross Platform API
#include "example.hpp" // Include short list of convenience functions for rendering
// Capture Example demonstrates how to
// capture depth and color video streams and render them to the screen
int main(int argc, char* argv[]) try
{
rs2::log_to_console(RS2_LOG_SEVERITY_ERROR);
// Create a simple OpenGL window for rendering:
window app(1280, 720, "RealSense Capture Example");
// Declare depth colorizer for pretty visualization of depth data
rs2::colorizer color_map;
// Declare rates printer for showing streaming rates of the enabled streams.
rs2::rates_printer printer;
// Declare RealSense pipeline, encapsulating the actual device and sensors
rs2::pipeline pipe;
// Start streaming with default recommended configuration
// The default video configuration contains Depth and Color streams
// If a device is capable to stream IMU data, both Gyro and Accelerometer are enabled by default
pipe.start();
while (app) // Application still alive?
{
rs2::frameset data = pipe.wait_for_frames(). // Wait for next set of frames from the camera
apply_filter(printer). // Print each enabled stream frame rate
apply_filter(color_map); // Find and colorize the depth data
// The show method, when applied on frameset, break it to frames and upload each frame into a gl textures
// Each texture is displayed on different viewport according to it's stream unique id
app.show(data);
}
return EXIT_SUCCESS;
}
catch (const rs2::error& e)
{
std::cerr << "RealSense error calling " << e.get_failed_function() << "(" << e.get_failed_args() << "):\\n " << e.what() << std::endl;
return EXIT_FAILURE;
}
catch (const std::exception& e)
{
std::cerr << e.what() << std::endl;
return EXIT_FAILURE;
}
运行结果:
imshow (C++)
// License: Apache 2.0. See LICENSE file in root directory.
// Copyright(c) 2017 Intel Corporation. All Rights Reserved.
Intel Realsense D435 python 从深度相机realsense生成pcl点云
使用 Intel RealSense D435 点云制作 3D 扫描模型
win10+vs2015+Intel RealSense D435i深度相机配置
python pyusb库使用教程在window10系统上操作USB(操作Intel Realsense D435)