SC-A-LOAM:在A-LOAM中加入回环检测
Posted Being_young
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了SC-A-LOAM:在A-LOAM中加入回环检测相关的知识,希望对你有一定的参考价值。
Thanks to LOAM, A-LOAM, and LIO-SAM code authors. The major codes in this repository are borrowed from their efforts.
代码:https://github.com/gisbi-kim/SC-A-LOAM
编译:点云PCL
本文仅做学术分享,如有侵权,请联系删除。欢迎各位加入免费知识星球,获取PDF论文,欢迎转发朋友圈。内容如有错误欢迎评论留言,未经允许请勿转载!
公众号致力于分享点云处理,SLAM,三维视觉,高精地图相关的文章与技术,欢迎各位加入我们,一起每交流一起进步,有兴趣的可联系微信:920177957。本文来自点云PCL博主的分享,未经作者允许请勿转载,欢迎各位同学积极分享和交流。
摘要
该开源库是在A-LOAM的基础上在增加了回环检测和位姿图优化模块(名为SC-PGO)
该库也在FAST-LIO2激光里程计中集成了。其代码位于 :
https://github.com/gisbi-kim/SC-A-LOAM
https://github.com/gisbi-kim/FAST_LIO_SLAM
主要内容及贡献
实时激光雷达SLAM集成了A-LOAM和ScanContext。
A-LOAM用于里程计模块(即连续运动估计)
ScanContext用于处理大漂移的粗略全局定位(即无初始姿势的机器人位置识别问题)
并将GTSAM的iSAM2用于位姿图优化。
此库旨在展示ScanContext的便捷适用性。
用户应该做的唯一事情就是包括Scancontext.h调用makeAndSaveScancontextAndKeys
和 detectLoopClosureID。
SC-A-LOAM特点
鲁棒的位置识别和回环闭合:将ScanContext作为回环检测器集成到A-LOAM中,然后进行基于ISAM2的姿势图优化。
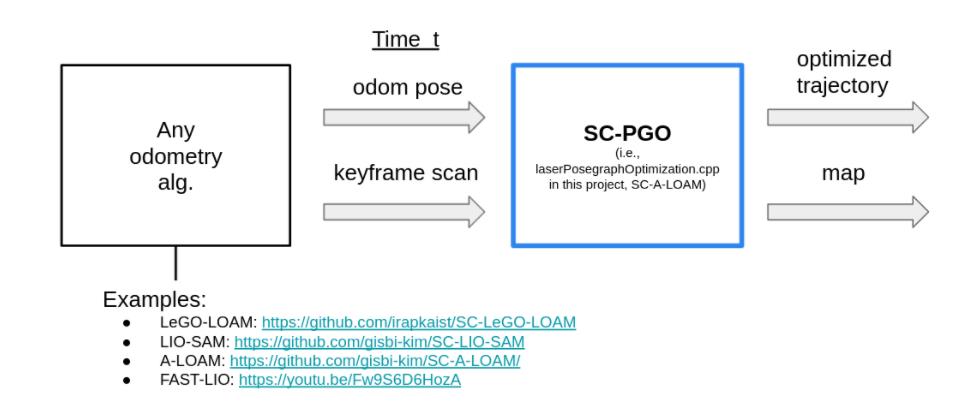
模块化实现:与A-LOAM的唯一区别是添加了laserPosegraphOptimization.cpp文件,在新文件中,订阅了点云topic和里程计topic(订阅了从laserMapping.cpp发布的A-LOAM的结果)。也就是说,实现了对于任何前端里程计方法都是通用的,因此,我们的姿势图优化模块(即laserPosegraphOptimization.cpp)可以轻松地与任何里程计算法集成,如甚至非LOAM系列或甚至其他传感器(例如视觉里程计)。
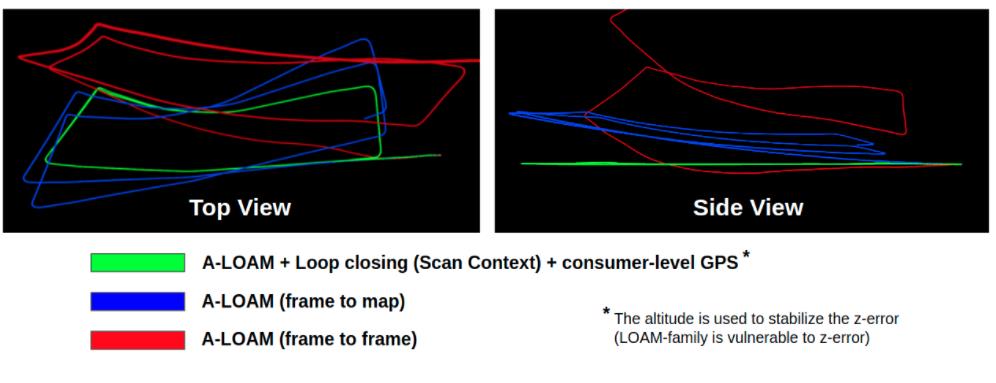
使用消费级GPS进行高度值稳定:为了使结果更加可信,模块支持基于GPS(消费者级价格,如U-Blox EVK-7P)的高度值稳定,众所周知,LOAM系列方法在室外易受z轴值误差的影响,这里仅对高度值使用稳健损失,有关详细信息,可参考laserPosegraphOptimization.cpp文件。
依赖
主要依赖ROS、Ceres(用于A-LOAM)和GTSAM(用于姿势图优化)。
实验
MulRan数据集
提供了激光雷达扫描点云( Ouster OS1-64,水平安装,10Hz)和消费者级gps(U-Blox EVK-7P,4Hz)数据。
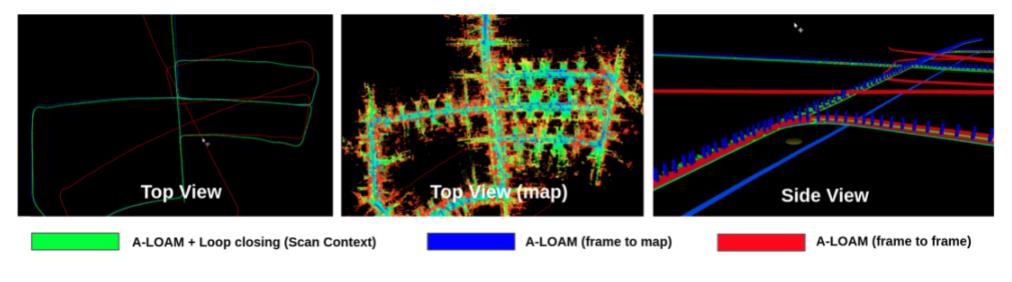
KITTI (HDL-64 获取点云数据)
室内场景
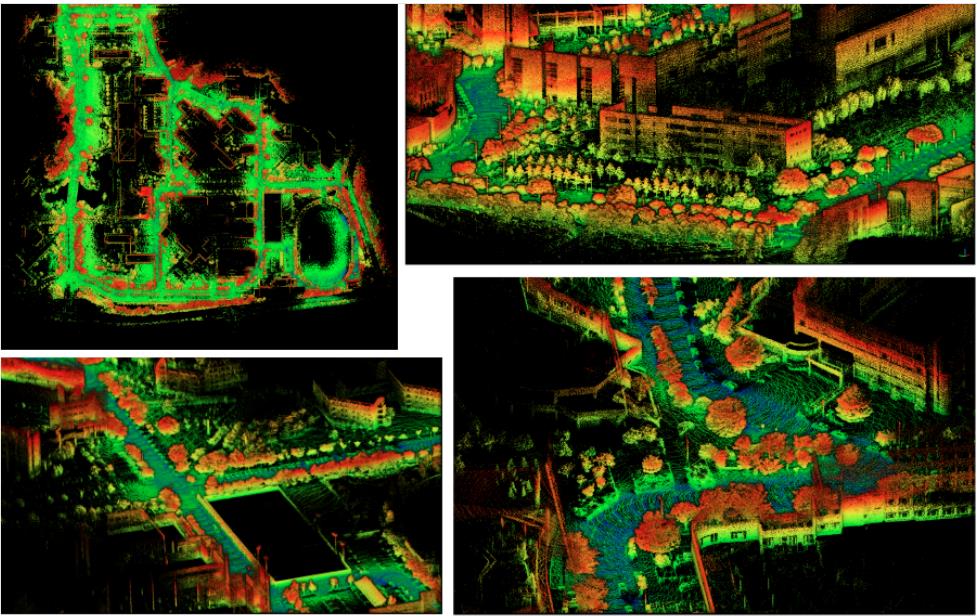
数据保存和地图构建
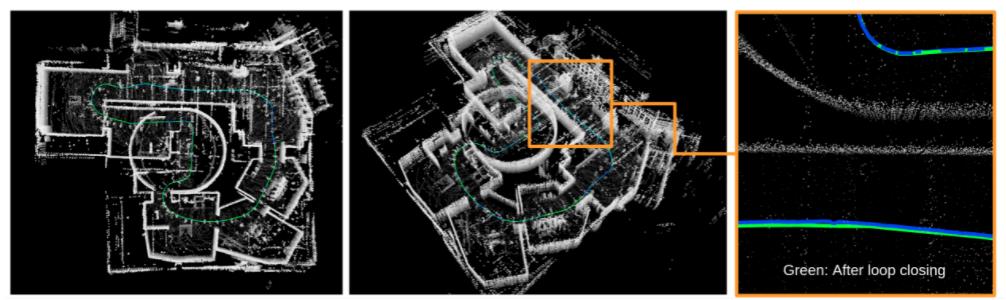
支持每个关键帧的位姿和扫描点云数据的保存,使用这些保存的数据,可以离线构建地图(在ROI内)。请参阅utils/python/makeMergedMap.py和对应教程。下面是MulRan数据集KAIST 03的合并地图的示例结果,使用CloudCompare可视化结果。
总结
A-LOAM的基础上在增加了回环检测和位姿图优化模块。也是LOAM系列SLAM方案的扩展和优化。
资源
三维点云论文及相关应用分享
【点云论文速读】基于激光雷达的里程计及3D点云地图中的定位方法
3D-MiniNet: 从点云中学习2D表示以实现快速有效的3D LIDAR语义分割(2020)
PCL中outofcore模块---基于核外八叉树的大规模点云的显示
更多文章可查看:点云学习历史文章大汇总
SLAM及AR相关分享
如果你对本文感兴趣,请后台发送“知识星球”获取二维码,务必按照“姓名+学校/公司+研究方向”备注加入免费知识星球,免费下载pdf文档,和更多热爱分享的小伙伴一起交流吧!
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除
扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入免费星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,高精地图,自动驾驶,以及机器人等相关的领域。
分享及合作方式:微信“920177957”(需要按要求备注) 联系邮箱:dianyunpcl@163.com,欢迎企业来联系公众号展开合作。
点一下“在看”你会更好看耶
以上是关于SC-A-LOAM:在A-LOAM中加入回环检测的主要内容,如果未能解决你的问题,请参考以下文章