目标检测算法Fast R-CNN(详解)
Posted ZSYL
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了目标检测算法Fast R-CNN(详解)相关的知识,希望对你有一定的参考价值。
Fast R-CNN
学习目标
-
目标
- 了解Fast R-CNN的结构特点
- 说明RoI pooling的特点
- 了解多任务损失
【目标检测算法】改进-SPPNet(详解)SPPNet的性能已经得到很大的改善,但是由于网络之间不统一训练,造成很大的麻烦,所以接下来的Fast R-CNN就是为了解决这样的问题
1. Fast R-CNN
改进的地方:
- 提出一个RoI pooling,然后整合整个模型,把CNN、RoIpooling、分类器、bbox回归几个模块整个一起训练
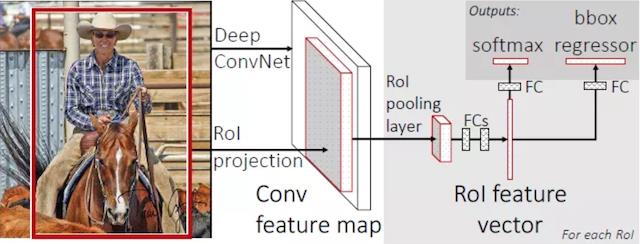
- 步骤
- 首先将整个图片输入到一个基础卷积网络,得到整张图的feature map
- 将选择性搜索算法的结果region proposal(RoI)映射到feature map中
- RoI pooling layer提取一个固定长度的特征向量,每个特征会输入到一系列全连接层,得到一个RoI特征向量**(此步骤是对每一个候选区域都会进行同样的操作)**
- 其中一个是传统softmax层进行分类,输出类别有K个类别加上”背景”类
- 另一个是bounding box regressor
1.1 RoI pooling
首先RoI pooling只是一个简单版本的SPP,目的是为了减少计算时间并且得出固定长度的向量。
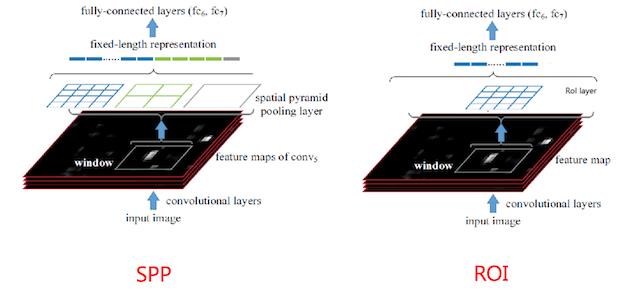
- RoI池层使用最大池化将任何有效的RoI区域内的特征转换成具有H×W的固定空间范围的小feature map,其中H和W是超参数 它们独立于任何特定的RoI。
为什么要设计单个尺度呢?这要涉及到single scale与multi scale两者的优缺点
- single scale,直接将image定为某种scale,直接输入网络来训练即可。(Fast R-CNN)
- multi scal,也就是要生成一个金字塔
后者比前者更加准确些,没有突更多,但是第一种时间要省很多,所以实际采用的是第一个策略,因此Fast R-CNN要比SPPNet快很多也是因为这里的原因。
1.2 End-to-End model
从输入端到输出端直接用一个神经网络相连,整体优化目标函数。
接着我们来看为什么后面的整个网络能进行统一训练?
特征提取CNN的训练和SVM分类器的训练在时间上是先后顺序,两者的训练方式独立,因此SVMs的训练Loss无法更新SPP-Layer之前的卷积层参数,去掉了SVM分类这一过程,所有特征都存储在内存中,不占用硬盘空间,形成了End-to-End模型(proposal除外,end-to-end在Faster-RCNN中得以完善)
- 使用了softmax分类
2. 多任务损失-Multi-task loss
两个loss,分别是:
- 对于分类loss,是一个N+1路的softmax输出,其中的N是类别个数,1是背景,使用交叉熵损失
- 对于回归loss,是一个4xN路输出的regressor,也就是说对于每个类别都会训练一个单独的regressor的意思,使用平均绝对误差(MAE)损失即L1损失

- fine-tuning训练:
- 在微调时,调整 CNN+RoI pooling+softmax
- 调整bbox regressor回归当中的参数
3. R-CNN、SPPNet、Fast R-CNN效果对比
| 参数 | R-CNN | SPPNet | Fast R-CNN |
|---|---|---|---|
| 训练时间(h) | 84 | 25 | 9.5 |
| 测试时间/图片 | 47.0s | 2.3s | 0.32s |
| mAP | 66.0 | 63.1 | 66.9 |
4. Fast R-CNN总结

- 缺点
- 使用Selective Search提取Region Proposals,没有实现真正意义上的端对端,操作也十分耗时
5. 总结
- 掌握Fast R-CNN的改进
- 掌握RoI pooling的作用
- 掌握多任务损失结构
6. 问题
1、详细说明RoI pooling过程?
2、Fast R-CNN的损失是怎么样的?
加油!
感谢!
努力!
以上是关于目标检测算法Fast R-CNN(详解)的主要内容,如果未能解决你的问题,请参考以下文章
R-CNN, Fast R-CNN, Faster R-CNN, YOLO:目标检测算法总结
计算机视觉——典型的目标检测算法(Fast R-CNN算法)(五)
目标检测算法(R-CNN,fast R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3)