汽车电子电气架构EEA演变
Posted bobuddy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了汽车电子电气架构EEA演变相关的知识,希望对你有一定的参考价值。
1、汽车电子电气架构:汽车的中枢神经
1.1. 汽车电子电气架构 EEA:电子电气设计的整体解决方案
汽车电子电气架构 E/E 架构(EEA, Electrical/Electronic Architecture)由德 尔福公司提出。汽车电子电气架构将传感器、ECU、线束、电子电气分 配系统整合,实现了汽车整体的配置和功能的实现。
E/E 架构通过物理层面的布置,对车身信息进行转化和处理,为汽车电 子电气设计提供了整体的解决方案。车上每一个功能都有一个最基础的 电气架构作为支撑,包括供电、控制、执行、反馈等回路,而整车的电 子电气架构就是这些基础电气架构的有机组合。
电子电气架构市场规模较大,ECU/DCU 占比最高。电子电气架构设计 组件包括软件、ECU/DCU、集成验证、动力系统、传感器以及其他包括 线束在内的电气器件。2020 年软件与电子电气架构市场规模 2380 亿美 元,ECU/DCU 市场规模 920 亿美元,占比 38.7%。
1.2. 大部分车企仍处于分布式架构阶段
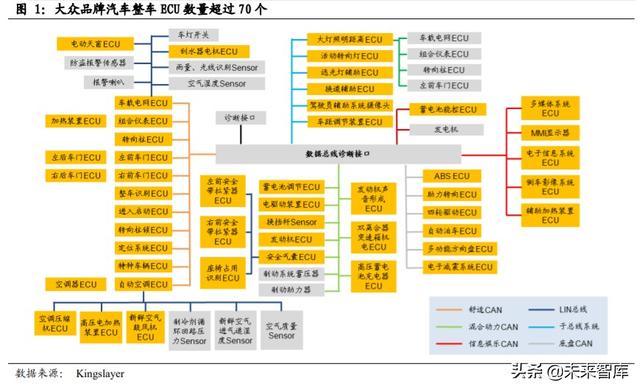
目前大部分车企仍处于分布式架构阶段,小部分车企出现分域的概念。目前整车的控制体系以电控单元 ECU 为核心,每个功能对应一个或多 个 ECU,比如加热装置 ECU、多媒体系统 ECU 等等。
电子控制单元 ECU( Electronic Control Unit)是汽车专用微机控制器。一 般由 CPU、存储器(ROM、RAM)输入/输出接ロ(WO)、模数转换換器 (AD)以及驱动等大规模集成电路组成。随着汽车的电子化发展,ECU 由 用于控制发动机逐渐深入到整个汽车,一辆车上的 ECU 个数也急剧增 多。从 1993 年到 2010 年,奥迪 A8 上使用的 ECU 个数从 5 个快速增加 到超过 100 个
随着汽车需要实现的功能越来越复杂、ECU 的数量越来越多,部分车企 一方面将 ECU 按照车身、底盘、动力、信息娱乐等进行域的划分,另一 方面通过中央控制网关实现跨功能连接,加强各个部件的协作。

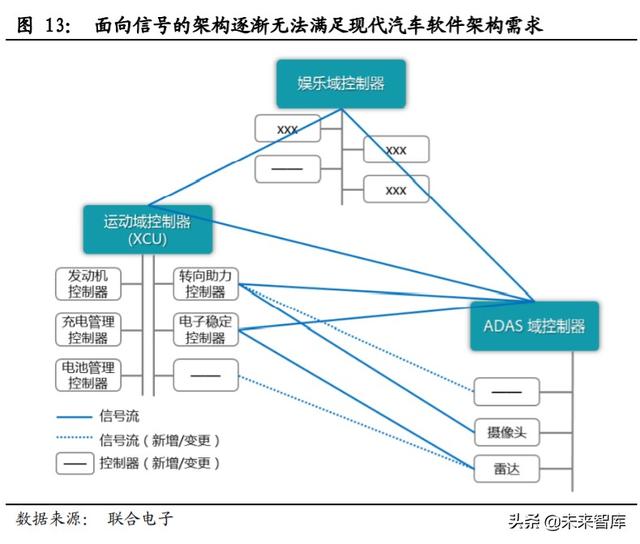
1.3. 传统软件架构及其开发模式以面向信号为中心
传统汽车软件架构为面向信号的架构(Signal-Oriented Architecture), ECU 之间基于信号进行点对点的通讯。在面向信号的架构中,整个系统 是“封闭静态分布式系统”,所有的决策在架构设计时被完成。车辆的软 件与组件相互绑定,无法统一对软件进行开发和修改。
面向信号的架构优势在于系统的已知性和可预测性。设计师可以在设计 时对资源进行优化,比如消息副本和总线调度。劣势在于运行时的灵活 性低,以及系统在后续无法拓展。同时,面向信号的架构只使用具有发 送发/接收方接口的软件组件,因而不支持更加复杂的功能实现。

1.4. 传统车企的信号传输以 CAN/LIN 总线为主
控制器局域网络 CAN(Controller Area Network)是国际上应用最广泛的 现场总线之一。CAN 总线解决现场控制设备和高级控制器之前的信息传 递问题,是自动化领域中底层数据通信网络。在现代大型整车厂的汽车 设计中,CAN 已经成为首选装置。与其它现场总线比较而言,CAN 总 线具有通信速率高、检错处理高效、性价比高等优势。

局部互联协议(LIN 总线)是面向汽车低端分布式应用的低成本,低速 串行通信总线。OEM 使用 LIN 总线主要是为了在不需要 CAN 总线的 带宽和多功能的时候降低成本,同时可以为汽车网络提供辅助功能。
LIN 总线与 CAN 总线相比在成本上的优势,主要源于其单线传输的特 点、硅片中硬件或软件的低实现成本,以及其无需在从属节点中使用石 英或陶瓷谐振器。而这些的代价就是 LIN 总线以较低的带宽和受局限的 单宿主总线访问方法。
2. 汽车 E/E 架构变革时代,朝着多域控制发展
2.1. 汽车电子电气架构从分散式向更集中的多域控制升级
E/E 结构变革可以分成五个阶段,目前大部分车企仍处于第三代 E/E 分 布式体系到第四代的变化过程中,从分散式走向更集中。在第三代 E/E 体系中,功能在具有高度软件到硬件(SW-to-HW)集成的 ECU 上。第四 代 E/E 体系中出现核心域控制器,在整合多个功能的基础上进行成本优 化和更多功能的实现
按照麦肯锡的定义,E/E 结构可以划分为五个阶段:
1、出现独立 ECU, 功能根据 ECU 进行一定程度的分离,功能与 ECU 一一对应;
2、出现分 域的概念,包括动力、底盘、车身等等域,同一个域的 ECU 被合并,域 与域的交流较少;
3、通过控制网关跨功能连接加强域与域的联系,可以 处理更加复杂的功能,比如自动驾驶;
4、出现核心域控制器对功能进行 整合,可以实现更复杂的功能;
5、出现虚拟域,专属硬件减少,应用以 太网加强通讯能力,汽车更像是一台高性能电脑。
伴随着集中化和软硬件的分离,多域控制器架构中将出现控制器交流跨领域现象。电子电气架构以一个控制单元来控制不同的领域,如信息娱 乐和车身控制。集中化将伴随着硬件和软件的分离,车辆系统被构建为 一个分层架构,在操作系统(OS)和中间件层有清晰的抽象结构点。跨 领域交流在信息娱乐和驾驶辅助方向将变得常见,因为高性能、低安全 性、延迟临界性的领域更容易也更有利于转变。

ECU、DCU、MDC 分别可以代表汽车控制器发展的三个阶段:由电控 单元 ECU 的数量急剧增多,到出现域控制器 DCU 的概念,再到分域控 制的控制思路,汽车控制思路经历了两次大变革。

域控制器 DCU( Domain Control Unit)的逻辑是按照电子部件的功能将 整车划分为几个域(动力总成,车辆安全,车身电子智能座舱和智能驾 驶等),再采用有更加优秀处理能力核心处理器对每个域进行控制,达到 取代目前分布式汽车电子电气架构的目的。
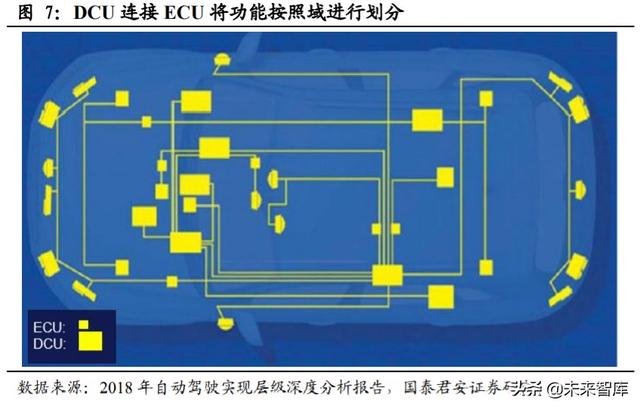
域控制器使得整车功能集成度得到提高,软件与硬件的设计有更多分离 的可能性。单个 ECU 的作用被弱化,复杂的数据处理和控制功能被统一 安排在核心处理器中,ECU 更多的是在执行 DCU 的命令。同时,传感 器模块不再需要与具体某个 ECU 相对应,因而零部件得以进行标准化 生产。

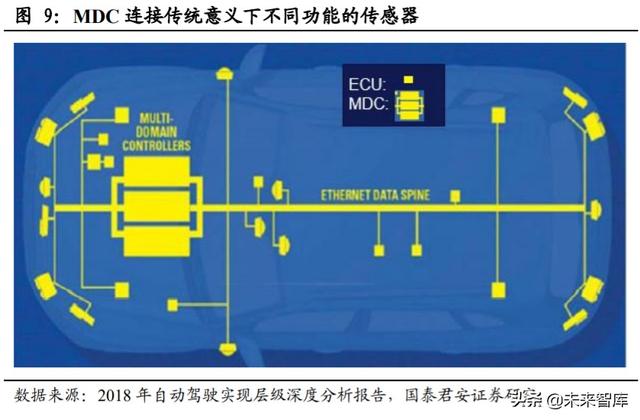
多域控制器 MDC(Multi Domain Controller)将是汽车电子电气架构未 来发展的趋势。随着汽车行业的发展,汽车控制器需要接收和分析处理 的信号变得更加复杂,数量也急剧增多。传统的功能于 ECU 一一对应的 模式,或是单一分模块的域控制器已经无法满足需求了,而 MDC 平台 本身的可扩展性使其能够对接的传感器类型与数目是不固定的。
MDC 的逻辑是通过一块 ECU 来接入不同的传感器得到的数据,对其进 行分析,最终发出控制的指令。与 DCU 不同的是,DCU 是单一模块的 域控制器,其对接的传感器是按照功能进行划分的,而 MDC 中一块 ECU 会接触传统意义下不同功能的传感器。
2.2. 降低成本和抢占市场份额是车企 E/E 架构变革的动力
新一代汽车电子电气架构带来的软硬件成本下降促进 OEM 和 TIER 1 投 入大量人力物力进行架构的变革。

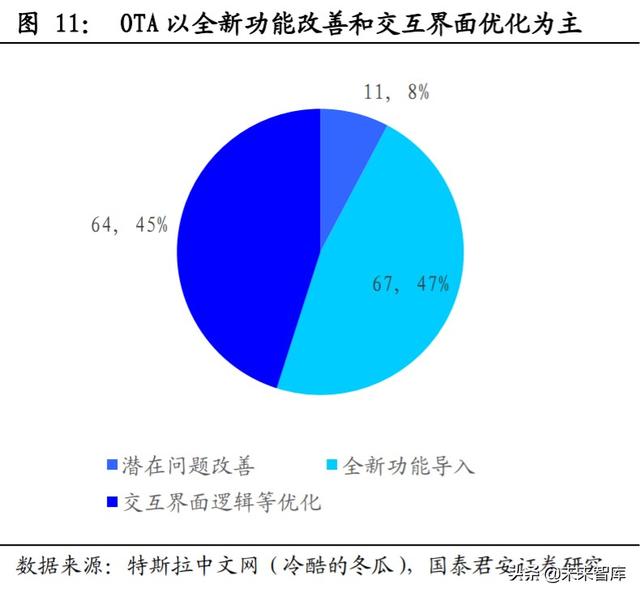
OTA 使得汽车成为车联网的一个个节点,功能的更新成本大幅度降低, 数据的搜集和处理难度指数级别下降。以特斯拉为代表的电动车可以通 过 OTA 对车载系统、软件等进行更新,更新内容主要包括动力、娱乐、 车身、底盘。特斯拉 2012 年 9 月至 2019 年 4 月共执行过 37 次 OTA 升 级,带来的功能升级以导入新功能和交互界面逻辑等优化为主。
抢占高进入壁垒的市场份额以此获得先发优势也是每个车企加快研发 速度的重要原因。预计 2020-2030 年软件与电子电气架构市场规模复合 增速为 7%,动力系统 2020-2030 年市场规模复合增速为 15%。
2.3. 软件开发与车载以太网是实现 E/E 变革的关键因素
2.3.1. 面向服务的软件架构 SOA 是 E/E 架构变革的有力支撑
作 为 传 统 汽 车 软 件 架 构 的 面 向 信 号 的 架 构 ( Signal-Oriented Architecture)逐渐无法满足现代的汽车软件架构需求。在智能化电子化 的趋势下,汽车功能需要各个 ECU 之前进行协调工作来实现,基于信号 的点对点通讯复杂程度激增,同时缺少灵活性和拓展性,部分功能改动 将导致开发人员不得不将整车通讯矩阵一起修改。
面向服务的软件架构SOA(service oriented architecture)将成为未来汽车 领域“软件定义汽车 SDV”的技术基础。软件定义汽车 SDV 代表了软 件带动汽车技术革新和促进汽车产品差异化的趋势,是汽车智能化与信息化的基础。SOA 具有松耦合的系统,即有着中立的接口定义,这意味 着应用程序的组件和功能没有被强制绑定,应用程序的不同组件和功能 于结构的联系并不紧密。应用程序服务的内部结构和实现逐渐改变时, 软件架构并不会受到过大的影响。
同时,“接口标准可访问”和“拓展性优秀”的 SOA 使得服务组件的部 署不再依赖于特定的操作系统和编程语言,一定程度上实现软硬件的分 离。SOA 能够与未来域控制器为核心的电子电气架构结合,助力实现汽 车的智能驾驶。

SOA 软件架构开发从用户的角度进行功能考虑,以业务为中心,将业务 逻辑进行抽象和封装。许多 OEM 使用 V 开发模型来进行软件的设计, 从市场上用户的需求角度来考虑功能和系统的实现,而不是从开发人员 的角度进行设计。通过初步解析来自市场的需求,技术人员有针对性的 对软件进行开发和升级管理。

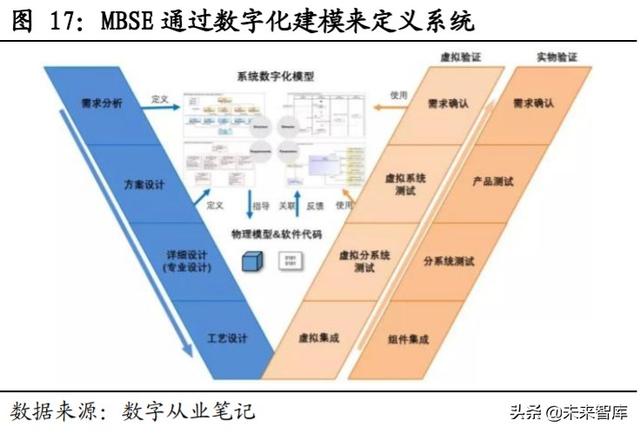
与此并行的还有利用基于模型的设计 MBD 和基于模型的系统功能MBSE。MBD 用数字化和可视化来解决问题和设计相关的复杂控制的算 法,MBSE 用数字化建模代替写文档进行系统方案设计,将设计文档的 描述转化为数学化模型,使设计能够标准化、数字化地进行储存和交换。
企业利用 AUTOSAR 部署和实现 SOA 软件架构,缩短了产品上市周期, 在减少重复的开发工作基础上提升了产品质量。
AUTOSAR(AUTmotive Open System ARchitecture)是各大主机厂与一 级供应商合作成立的开放的、标准的 ECU 软件架构,其初衷是为了避 免重复开发功能相同或相近的软件模块。大众汽车 70 个控制单元的操 作软件来自 200 家不同的供应商,同时集团内部的一些操作系统具有相 似功能,如信息娱乐系统和导航系统
AUTOSAR 分为 Classic Platform AUTOSAR(CP)和 Adaptive Platform AUTOSAR(AP)两个平台。前者广泛应用于传统嵌入式 ECU 中,包 括发动机控制机和电机控制器,后者更多的应用于 ADAS 和自动驾驶等 对于计算能力和带宽通信要求更高的领域中。出于对于汽车安全的要求, Adaptive AUTOSAR 还介入驱动底层。

对于 SOA 软件架构来说,Adaptive AUTOSAR 组件封装了 SOA 软件底 层的通讯细节,包括 SOME/IP 协议和 IPC。同时,Adaptive AUTOSAR提供的代理-骨架(Proxy-Skeleton)模型以 C++面向对象语言描述,为上 层应用开发人员调用标准服务接口(API)提供了方便。
2.3.2. 车载以太网为高速率、高带宽信号传输提供保障
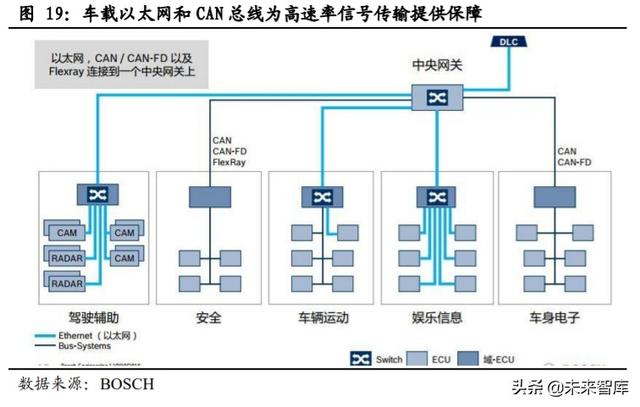
汽车电子电气架构中往往同时使用车载以太网和 CAN 总线,二者结合 为汽车信号传输的高速率和高带宽提供了保障
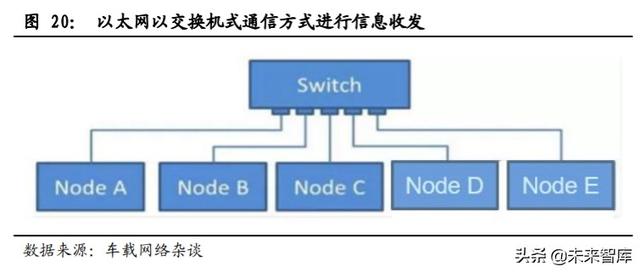
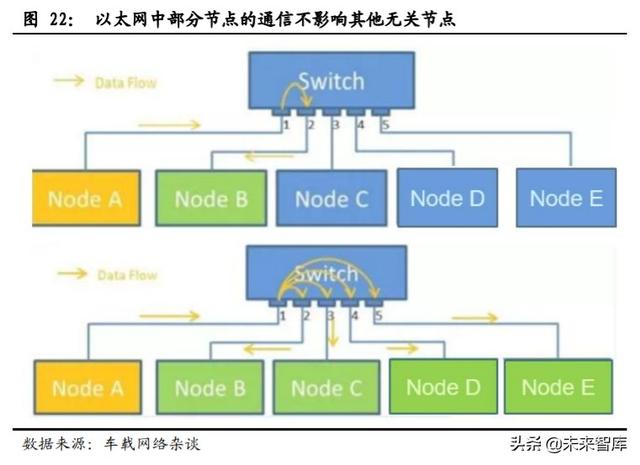
以太网为交换机式(Switched Network)通信方式,网络中存在终端节点 和交换机节点,所有终端节点都需要经过交换机节点的转发才能进行通 讯,转发信息也是交换机节点的主要功能。终端节点有且只有一个以太 网端口,而一个交换机节点有多个以太网端口。
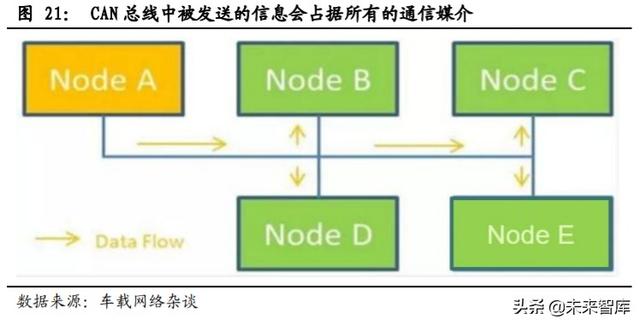
与传统车载通信技术(如 CAN)相比,以太网提供了更高的带宽和交换 网络,具有非常强大的通信能力。CAN 总线为广播式通信,多主方式的 工作使得每个节点发送的信息都可能占据所有的通信媒介,只是接收节 点可以选择是否接受该信息。
而以太网以一对一或一对多两种方式进行通信,一对一的方式中发送节 点的报文中涵盖自己和一个接收节点的地址;一对多的方式中发送节点 的报文中涵盖自己和多个接收节点的地址。二者都不影响其他节点的通 信。
2.4. 电子电气架构变革将带动各组件市场快速发展
汽车电子电气架构的演变将同步影响组件市场。DCU、ECU、传感器及 其他电子器件市场将进一步发展为更加成熟和独立的市场。
汽车软件和 E/E 架构组件市场处于快速扩张阶段。2020 年,软件与 E/E 架构组件市场规模达 2380 亿美元,其中 ECU/DCU 市场规模达 920 亿 美元,占比接近 40%。

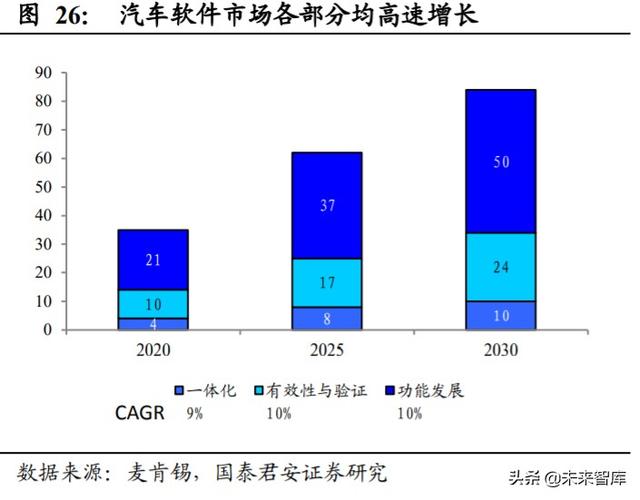
根据麦肯锡的预测:预计软件及 E/E 架构 2020 年至 2030 年市场规模复 合增速为 7%;预计 ECU/DCU 2020-2030 年市场规模年复合增速为 5%, 各组件保持平稳增长;预计传感器 2020-2030 年市场规模年复合增速为 9%,其中动力相关传感器市场预计复合下降 1%,ADAS 相关传感器将 有 13%的复合增长;预计动力系统 2020-2030 年市场规模年复合增速为 15%,其中除 BMS 相关部分均快速增长;预计汽车软件 2020-2030 年市 场年复合增速为 9%,各个部分增长速度较快且较为均衡。

控制单车软、硬件成本是未来整车企业工作重点之一,ECU/DCU 单车 价值将下降。在软件和 E/E 架构各组件单车价值呈上升趋势的同时, ECU/DCU 单车价值将会有一定下降。预计 2030 年 ECU/DCU 组件单车 价值将从 2025 年的 894 美元下降到 822 美元。
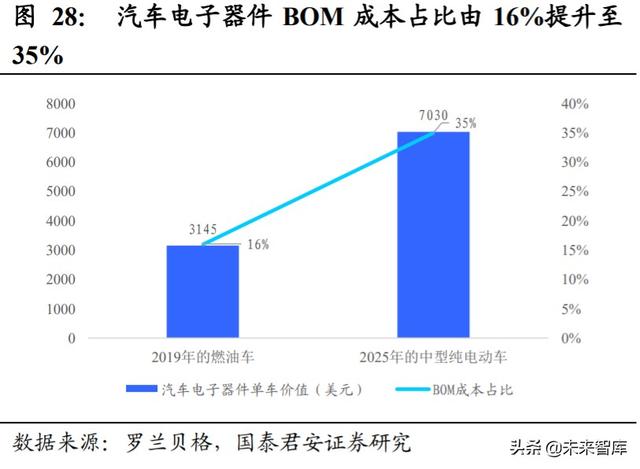
汽车电子器件占 BOM 成本比例将大幅提升。在一辆 2019 年的传统燃 油车上,汽车电子产品的 BOM 成本约为 3145 美元,到了 2025 年,预 计在一辆中型纯电动汽车上,汽车电子产品的 BOM 成本将上升至 7030 美元,汽车电子器件占 BOM 成本比例也将从 16%提升至 35%。增量中 925 美元属于自动驾驶,主要器件为传感器;增量中 725 美元属于数字 化,主要器件为汽车电子架构;增量中 2235 美元属于电气化,主要器件 为电驱、车载充电器、转换器和动力系统逆变器。未来车企将凭借其自 主研发的芯片和系统打造应用生态,电子电器成本占比有望继续提升, 新车型将在未来拥有更多智能功能。
3. 特斯拉 E/E 架构已经实现多域控制,在行业内领先 优势明显
3.1. 特斯拉电子电气架构由具有分域趋势走向实现多域控制
从 Model S 的明显域划分概念,到 Model 3 真正实现多域控制,特斯拉 电子电气架构实现了前所未有的高集成度。
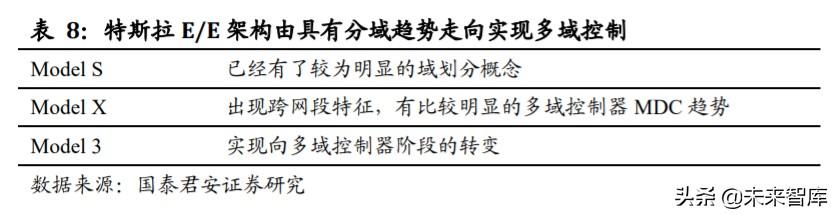
特斯拉 Model S 已经有了较为明显的域划分概念,包括动力域 Power Train、底盘域 Chassis、车身域 Body 以及一路低速容错 Body FT 等。

Model X 的部分控制器出现跨网段的特征,有比较明显的多域控制器 MDC 趋势。比如中央车身控制器 Central Body Control Module 横跨了底 盘 Chassis、车身低速容错 Body FT 以及车身 Body。
Model 3 标志着特斯拉从域控制器的阶段直接进入多域控制器阶段。单 个控制器可以对接到传统意义下不同功能的传感器,通过一块 ECU 来 接入不同的传感器得到的数据,对其进行分析,最终发出控制的指令。
Model 3 四大控制器 AICM(辅助驾驶及娱乐控制模块)、BCM RH(右 车身控制器)、BCM LH(左车身控制器)以及 BCM FH(前车身控制器) 控制着整辆车几乎所有功能。
相比于 Model S 的 6 路总线 30 多种实现不同功能的单元,Model 3 主要 有 3 路 CAN 总线,分别是:
Private CAN,连接驱动模块、AP,底盘的转向、制动,推测承载车辆最 基本主要的驱动和底盘控制等功能模块信息交互。
Vehicle CAN,连接三大车身控制器、高压管理模块以及 VSC(Security Controller),目前推测其主要实现传统车身域功能(负载控制、空调、进 入退出)以及高压管理。
Chassis CAN,相比来说是最传统的,连接了制动、转向、气囊等。
3.2. 特斯拉在 Model 3 的 E/E 架构上做了诸多创新
在控制器领域,Model 3 实现了多域控制,而且控制器表现出了高度集 成化,功能标准化、形状个性化的特征。Model 3 的左、右、前车身控制 器在印刷电路板上的元件铺贴密度都非常高,一块印刷电路板上设计了 多颗控制器,FBCM 有 4 颗 MCU,而 BCM LH 与右车身控制器中各有 3 颗 MCU; 而在功能上除了核心控制器之外的的子控制器功能更加标 准化,实现了软硬分离,特斯拉自研的控制器比例超过 50%;而在形状 上 Model 3 车身控制器的形状并不是传统的规则方形,根据整车设计决 定的控制器的高度和面积来决定形状。

除了控制器的特点外,Model 3 在电子电气架构上还有以下特征:
1)打 造自己的车载 linux 系统,80%以上软件自己开发;
2)控制器为线束模 块化服务,车载线束总长度降至 1.5km;
3)去保险丝化和去继电器化。

Model 3 的左、右、前车身控制器在印刷电路板上的元件铺贴密度都非 常高。BCM RH 的 PIN 脚甚至达到了 277 个。Model 3 的三个车身控制 器,相当于传统车的车身控制器再加上座椅控制器、门控制模块、方向 盘位置记忆控制器、电子驻车控制器、自动泊车辅助控制器、空调控制 器、智能电池传感器,同时还取代了传统车上的发舱保险丝盒及驾仓保 险丝盒,集成了几乎所有能够集成的硬件。
源于高集中度,Model 3 在一块印刷电路板上设计了多颗控制器。FBCM 有 4 颗 MCU,而 BCM LH 与右车身控制器中各有 3 颗 MCU。多 MCU 冗余设计保障了部分功能的功能安全级别。与之相对的,在控制功能的 任务拆解与分配、MCU 间的板级通讯、多 MCU 的诊断刷新以及 OTA 升级等方面,特斯拉需要处理的问题也增加了。
特斯拉在 Model 3 上体现了其在传统保险丝和继电器功能的变革。Model 3 除了电池内部控制器外,已经将继电器和可熔断保险全部换成了车身 控制内集成的电子保险丝盒,通过金属-氧化物半导体场效应晶体管 MOSFET(Metal Oxide Semiconductor Field Effect Transistor)控制不同的 负载的供电以及进行开路诊断和过流保护,后者替代了保险丝的功能。
特斯拉对于继电器的处理主要源于继电器体积大带来的集成度上升,以及半导体在成本压缩和性能上的优势。采用电子保险丝盒可以更加可靠 地控制每个控制器的供电,并且对 ECU 的用电情况进行检测,在静态功 耗高时对特定 ECU 进行断电处理,做到每一个控制器供电的可控性,可 以检测每一个 ECU 的用电情况,并且可以在静态功耗高时彻底断掉某 些 ECU 的供电。继电器可能以 Model 3 为开始,逐渐退出汽车电控高端 市场的舞台。
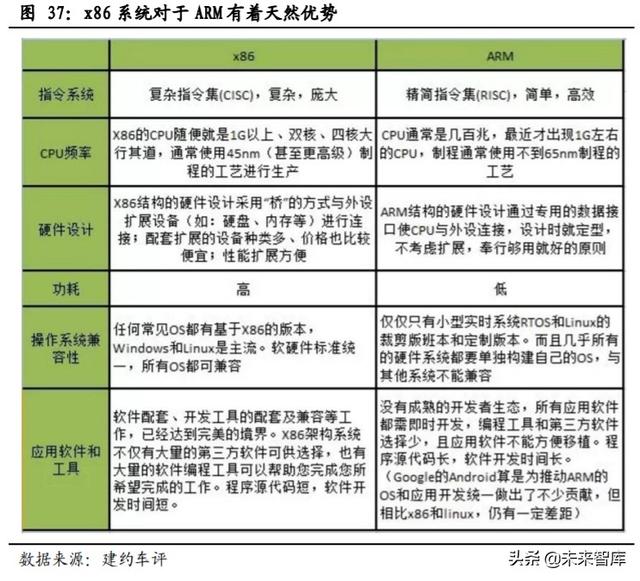
Model 3 革命性地使用了 X86 架构和 Linux 操作系统。
AICM(辅助驾驶及娱乐控制模块)搭载了 Intel 公司的 Atom A3950 处 理器,集成了 NXP 公司的 QorIQ 芯片,在性能上有着非常大的优势。
芯片层面,NXP 公司的 QorIQ 芯片负责车内子系统的通信互联和配置管 理,实现了边缘设备与云之间无缝且安全的数据流动。
处理器层面,Intel 公司的 Atom A3950 处理器使用 X86 架构,负责整个 车载信息娱乐系统,对比 Acorn 公司的 ARM 处理器有着天然优势。同 时,Atom A3950 平台上运行的是特斯拉自己打造的车载 Linux 系统,使 用的软件 80%以上为特斯拉自己开发,保障了特斯拉在软件上绝对控制 地位。
以上是关于汽车电子电气架构EEA演变的主要内容,如果未能解决你的问题,请参考以下文章