学习笔记3--自动驾驶汽车电子电气架构
Posted FUXI_Willard
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了学习笔记3--自动驾驶汽车电子电气架构相关的知识,希望对你有一定的参考价值。
本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》。
此专栏是关于《自动驾驶汽车平台技术基础》书籍的笔记.
1.自动驾驶汽车电子电气架构
1.1 典型电子电气架构
-
电子电气架构是汽车电子电气系统的顶层设计,目的是在政策法规和设计指标等约束条件下,对功能、成本和装配等方面进行具体分析,得出最优的电子电气系统架构;
-
先进的电子电气架构(Electronic & Electrical Architecture,EEA)设计取代了传统的原始线束设计;
-
汽车电子电气架构在宏观上概括为物理架构和逻辑架构的结合,微观上实现是通过众多电子电器件的协同配合,或集成或分布式的系统级的电子电气架构;
-
受到不断增长的市场需求(功能需求、行业特点)的影响,汽车电子电气架构平台的发展主要经历了4个阶段:关联式分布系统架构、联合式分布系统架构、联合式分布系统架构(升级过渡)、综合式集权域系统架构,如下图所示:
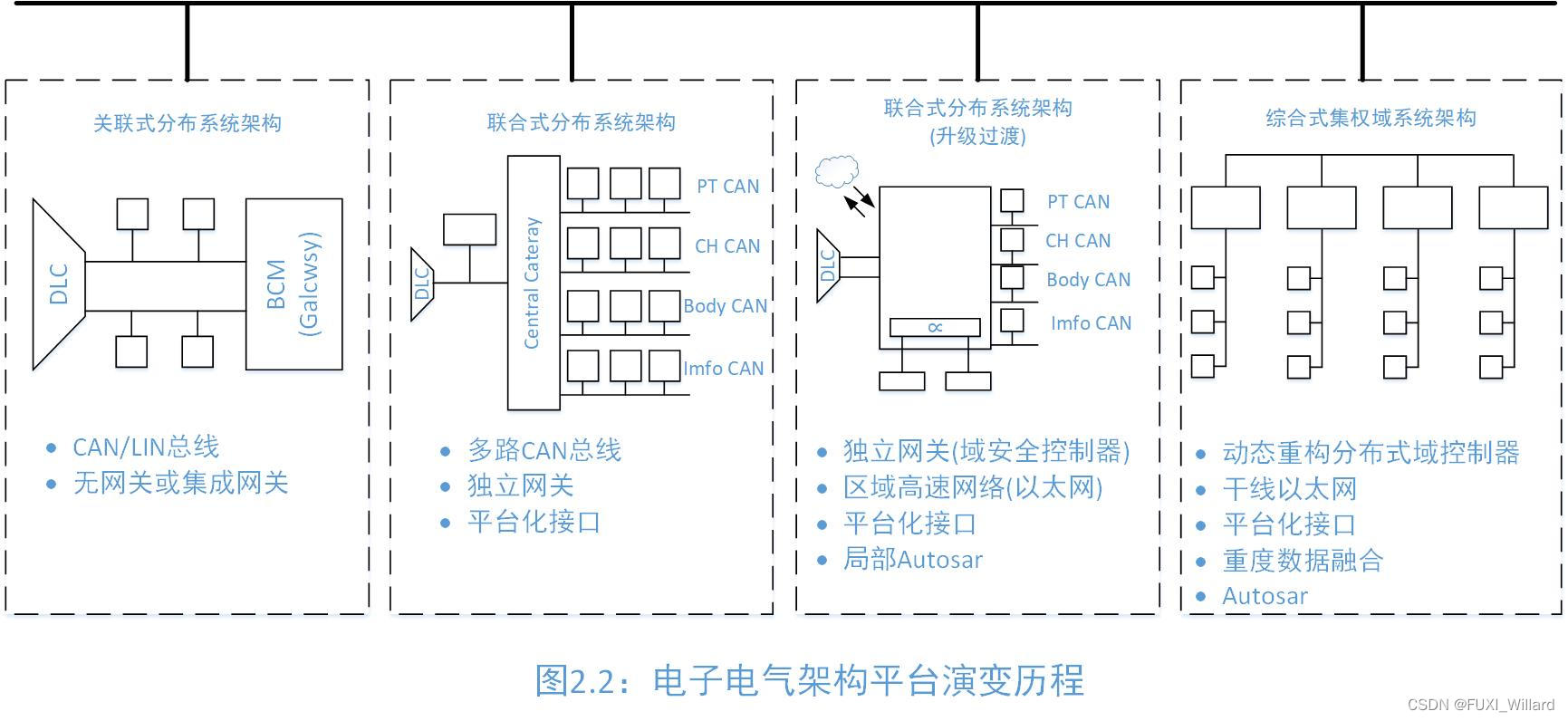
- 关联式分布系统架构:属于传统独立式子系统,各功能域之间进行弱连接;
- 联合式分布系统架构:是一种基础域控制器(电源模式、网络管理、防火墙等),将整车各功能模块联合,来满足互联网汽车、自动驾驶辅助系统(ADAS)等功能;
- 联合式分布系统架构(升级过渡):是一种区域强化域控制器,将传统子系统紧密连接起来,使自动驾驶车辆能够接入互联网;
1.2 电子电气架构发展趋势
- 在新型电动汽车的正向开发中,借助于芯片、电子元器件等成本下降,整车企业都在以车载以太网和域控制器为核心器件对汽车电子架构进行模块化设计;大幅度缩减线束长度,可以降低电线电阻,进而减少能量损耗,对于提升续航将会起积极的作用;
- 在传统的车身架构中,汽车主要以CAN协议传输数据,其500Kb/s的传输速率已无法满足未来智能化和数字化汽车的发展;为了满足未来自动驾驶汽车不断增加的数据处理要求,目前主要厂商正在研发中的可拓展型电子电气架构至关重要;
- 汽车电子电气架构距今最近的一次真正变革出现在1983年:博世集团推出CAN(控制器局域网)协议;作为一种集中式网络,CAN总线可以广播车辆的全部数据流,允许车内的各种控制器和传感器相互沟通;
- 未来,以太网将成为一种主要技术,与CAN总线并行工作;配合CAN总线使用时,为了使以太网总线不会被一些优先级不高的指令阻塞,可以让以太网单纯负责一些更关键的安全系统,然后将一些与驾乘舒适度有关的功能交给CAN总线处理;
- "CAN+车载以太网"构成双主干网络总线架构,CAN协议主要负责时效要求更高、数据量小的信息传输,车载以太网主要作用于不同的域之间,以实现数据量大的信息互通;
自动驾驶架构
自动驾驶架构
本文整理自公众号九章智驾文章
2万字长文说清自动驾驶功能架构的演进
架构
- 物理(电气)架构: 体现整车电子电气的布置关系与连接关系, 主要工作为电气原理图设计, 电源分配设计, 搭铁分配设计, 二维线束走向&三维布置设计
- 功能(逻辑)架构: 功能实现所需完整电器要素与逻辑关系(传感器-控制器-执行器), 主要工作为功能定义规范, 故障后处理策略
- 系统架构: 体现ECU内部元器件逻辑关系
- 网络架构: 体现各个ECU在哪个网段, 在总线上连接关系, 不同的LIN/CAN/CAN-FD/以太网

分布式ADAS架构

- 分布式开发, 各传感器耦合度低, 各司其职, 集成度低, 开发周期短, 可移植性强
- 传感器配置
- 行车: 5R1V, EQ4在camera中
- 泊车: 4环视+12超声波雷达
- 特点: ECU分散, 软件分散
- 复用性: 无域控制器, 前摄像头可集成EQ4/5作为替代, 纵向横向L1功能接口由相机统一输出对整车控制接口, 功能实现L2, 利于OEM平台化设计
- 灵活性: 可裁剪前毫米波雷达->4R1V架构(健壮性可能↓)
- 兼容性: 捆绑销售EPS, ESP执行器等
- 安全性: AEB存在ASL D的安全目标, 通过执行器限制性能/安全阈值, 降低风险->ASIL B
- 企业: 吉利,长城,比亚迪,长安,广汽,北汽,蔚来,理想
域控式ADAS架构

- 支持L2级别功能, 增加域控制器
- 特点
- 域控式ADAS将控制算法从传感器端->域控制器端, 域控制器做简单的后融合算法
- HMI设计变化, 开关一键多用
- 成本: 域控式成本>分布式, 提高可靠性,健壮性
- 可拓展性: 算法上移(摄像头->域控制器), 视觉依赖单颗SOC,
- 兼容性: 域控制器与底盘控制器接口平台化设计,可作为冗余控制器
- 安全性: 可在执行器(转向&制动)做安全约束, 降低安全功能等级
跨域式ADAS架构(行泊一体)
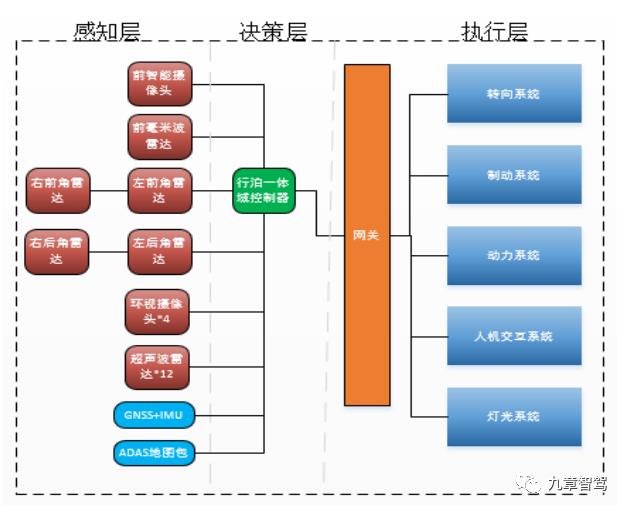
- 硬件上 + GNSS, IMU组合定位, 软件上 + ADAS地图, 行车域+泊车域->行泊一体域控制器
- 功能: L2以下所有ADAS功能
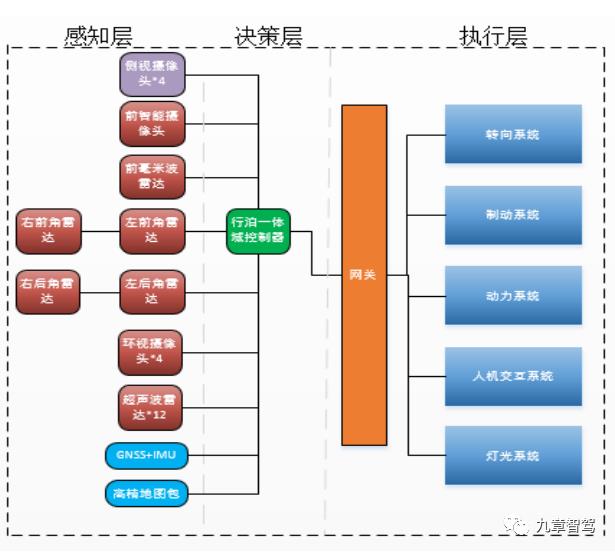
- 局限性: 低配版无法支持车道级定位, 不能安全通过匝道, 无法实现点到点行车; 高配版支持上下匝道,点到点NOA,冗余侧视摄像头数据引入降低目标漏检率
- 安全性: 侧后方无视觉传感器, 仅有角雷达, 主动变道有风险
- 跨域式系统架构设计
- 单SOC+MCU, 华为MDC610控制器
- 双SOC+MCU, 华为MDC810控制器
- 三SOC+MCU, 地平线行泊一体方案
- 单SOC, 知行科技IDC3.0方案, 寒武纪SD5223行泊一体方案
跨域冗余式ADS架构
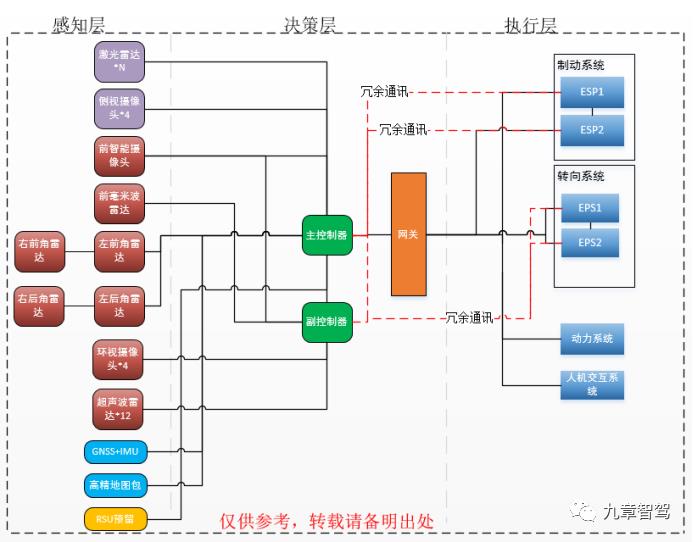
- 主控制器
- 双SOC+MCU, SOC跑感知融合算法+规控算法, MCU为安全岛做整车接口
- 处理激光雷达+前视+侧视摄像头+角雷达+高精地图数据, 硬件传感器FOV重叠做前融合设计, 高精地图为辅助传感器, 提供车道线+车道级定位信息, 道路分流,合流,限速路段道路静态信息
- 主控制器控制请求一路通过网关转发到执行系统, 一路通过冗余私有CAN直接发给执行系统
- 轻微故障管理+故障处理策略切换, 执行预设MRM(冗余传感器遮挡/故障)
- 副控制器
- 行泊一体控制器
- 处理环视摄像头+前视摄像头+前毫米波+超声波雷达数据, 主控制器无故障时将上述目标融合信息转发给主控制器,分担算力
- 独立AEB功能
- 本车道停车
副控制器跟“冗余控制器”不是同一个概念。
冗余: 意味着互相独立,在主控故障后,冗余控制器接管车辆。因此,冗余控制器需要跟主控制器完全解耦,只有L4才会采用这种设计理念(L4的副控制器跟冗余控制器是同一个概念)。
但在L3中,副控制器通常承担算力分担功能——通俗地说就是,它也参与计算,但只是把计算结果发给主控,节省主控算力。在主控挂掉后,副控制器接管整车,实现L2功能,仍可以保留安全行车的能力;或者,能执行MRM就可以。
中央计算平台(行泊舱一体)
以上是关于学习笔记3--自动驾驶汽车电子电气架构的主要内容,如果未能解决你的问题,请参考以下文章