5G车路协同自动驾驶应用研究
Posted 爱是与世界平行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了5G车路协同自动驾驶应用研究相关的知识,希望对你有一定的参考价值。
5G车路协同自动驾驶应用研究
5G车路协同自动驾驶应用研究
本文提出了一种 5G 车路协同自动驾驶解决方案,该方案主要依托 5G 移动通信、高精度定位技术、五维时空融合技术、边缘计算、边云协同等技术,实现边缘平台算力部署,构建“端 - 边缘 - 云”分层架构,建立智能可靠车联网通信、车辆的实时高精度定位、交通态势感知、交通管控等技术体系,实现 5G 车路协同,全面提升车辆感知决策控制能力。当前,该方案已在武汉经开区智能网联汽车与智慧道路自动驾驶示范区应用落地。
1、引言
随着 5G 技术的不断成熟与广泛应用,一切依赖于 5G 的行业与应用,迎来了新的生机。
5G+B(北斗)+AICDE 技术的组合,服务于工业互联网、智能电网等 14 个垂直行业,实现了超过 100 种应用场景和超过 100 个标杆示范的应用落地。5G 时代,将是各类高新技术百花齐放、各显神通的时代;5G 的建设,势必会带来资源共享、合作共赢的新型生态。
自动驾驶,需解决四个方面的问题:看得见(定位、避障)、听得着(决策、控制、执行)、讲得出(路径规划、行车方式)、有大脑(边缘计算)。5G 车路协同自动驾驶,就是充分利用 5G(高带宽、低时延、高可靠性、海量互联)、北斗(高精度定位、精细化导航、精准度授时)、V2X(人、车、路、网融合)等领域的优势,强强联手,互惠互利。
早期的车路协同,存在一定的局限性,比如过分强调车的能力、忽视交通领域的融合等,致使车路协同进展缓慢。在车联网领域,网联智能是未来车路协同的趋势,特别是在融入 5G 技术后,5G 车路协同成了新的方向。本文定位于 5G 车路协同下的自动驾驶研究,提出了一种 5G 车路协同自动驾驶应用解决方案,该方案已成功应用于武汉经开区智能网联汽车与智慧道路自动驾驶示范区。
2、5G 车路协同自动驾驶总体方案
武汉经开区示范区,是我国规模最大的开放道路示范区项目,其建设内容如表 1 所示。
表 1:武汉经开区示范区项目的整体建设内容
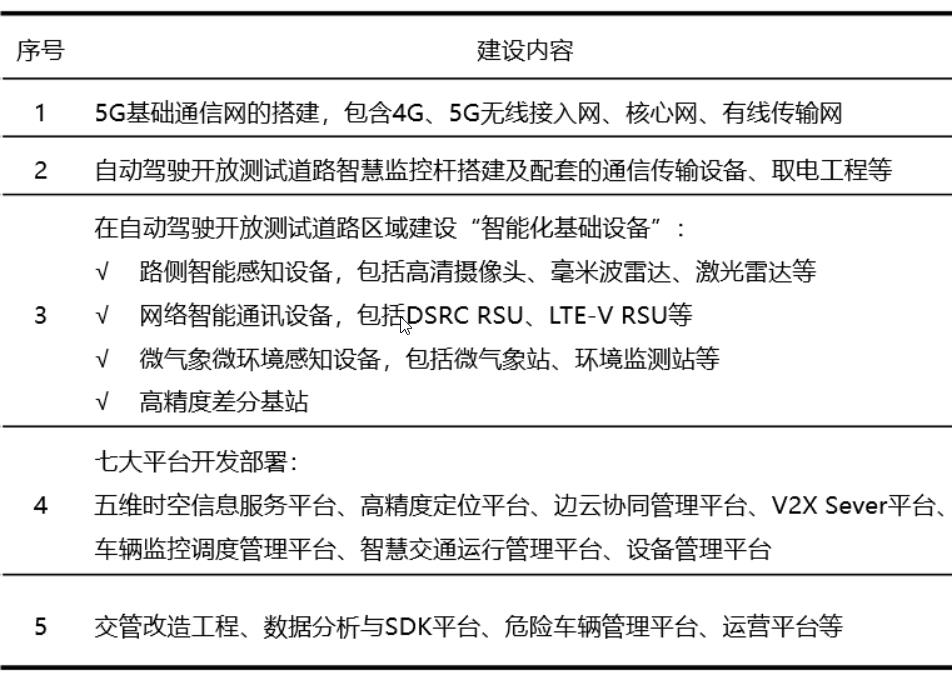
武汉经开区示范区项目,不仅示范道路长、场景多,更兼有国庆献礼、保障武汉军人运动会、带动区域经济、发展车都等多种使命。项目的总体架构图如图 1 所示。示范区的建设,主要包括 3 个部分:5G 移动通信网络、5G 智慧道路、多领域融合的软件平台。

图 1:武汉经开区示范区项目的总体架构图
3、5G 智慧道路
3.1 智能全域感知道路
智能全域感知道路是一个集全域感知、信息交互、规划决策等功能于一体的高新技术道路综合体:
(1)在感知层面,通过道路基础设施的更新,在路侧布设智能设备,将道路标识、交通信号灯、可变信息交通标识牌、道路交通事故、道路施工等道路信息与天气环境信息、车辆姿态信息、行人信息等实现数字网联化,获取连续时间空间的人 - 车 - 路 - 环境全域感知信息,为自动驾驶提供丰富全面的信息和决策依据。
(2)在信息交互方面,通过各种通信技术如 V2X 通信技术和网络协议,实现传感网、车联网、光纤网络和各种无线网络之间的互联互通,保证各类信息的有效传输,同时满足极端条件网络的稳定性和信息安全性。通过车内通信网、车际通信网和广域通信网的整合互通,可以更有效地获得人 - 车 - 路 - 环境信息数据,为数据的整合和分析提供了丰富的渠道。
(3)在规划决策方面,通过边缘计算、人工智能和大数据等技术,实现人 - 车 - 路 - 环境数据的存储,信息挖掘和决策支持,提前感知提醒和规划车辆的行车路径和路权等级,实现对车流在时间和空间上的引导、分流,避免道路堵塞,实现道路交通安全态势的前驱诊断、事故预警和主动干预,从而提高道路的交通通行能力和管理效率。
3.2 智能路侧设备
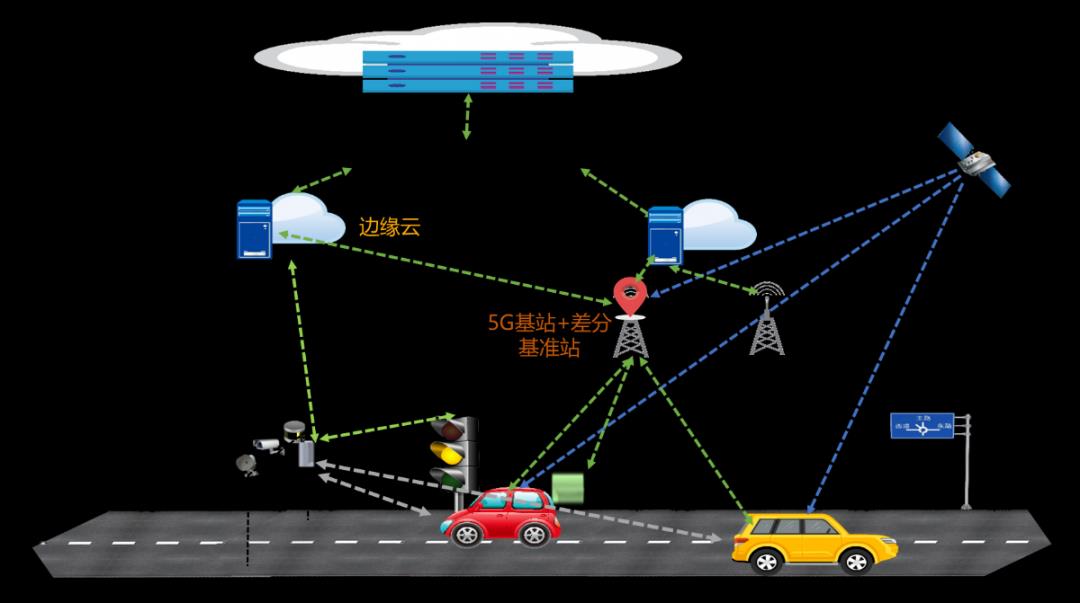
图 2:智能路侧设备示意图
智能路侧设备包括 C-V2X RSU 设备、路侧感知设备、路侧边缘计算设备、路侧气象设备和路侧道路环境监测设备等。
A、C-V2X RSU 设备
RSU(Road Side Unit)为 C-V2X 技术的路边单元,是车路协同系统的重要组成部分,也是突破车路协同技术的关键所在,其主要功能是采集当前的道路状况、交通状况等信息,通过通讯网络,将信息传递至指挥中心或路侧处理单元进行处理,并裁定相关信息通过网络传递到有相应信息请求的车载终端,避免或减少交通事故,提升交通通行效率。
车载单元(OBU,On Board Unit)是指安装在车辆终端的起拓宽驾驶员视野、增加驾驶员对行车环境和车辆运行状态的感知、加强行车安全的单元。主要技术包括信息获取、信息交互、事故隐患提示等。从各类传感器和车载网络获取原始信息,并解算出典型车路协同应用需要的底层信息,通过信息交互传递至路侧单元。其功能包括车辆运动状态获取、行车环境信息感知、车辆定位信息获取、信息交互、信息处理及管理、安全报警与预警等。
B、路侧感知设备
路侧感知设备包括路侧视频设备、路侧激光雷达、路侧毫米波雷达等,具体描述如下:
(1)路侧视频设备:包括高清摄像机、枪型摄像、全景摄像机、视频雷达一体机等,其中,高清摄像机可完成目标检测功能,完成检测数据封装和发送功能,主要由智能摄像头、终端服务器、外场工业交换机、光纤收发器、开关电源、防雷器等设备组成;枪型摄像机广泛应用于城市道路监控,实现混行车道场景全目标的属性识别和捕获;全景摄像机可同时提供全景与特写画面,兼顾全景与细节,实现区域入侵、越界等行为的检测等功能;视频雷达一体机可以实现动态跟踪和采集车辆、行人数据。
(2)路侧毫米波雷达:对道路上行驶的车辆、行人、动物、抛洒物体进行实时跟踪定位检测并及时将所感知的路况信息、交通状态信息、车辆实时信息分析汇总后通过车路协同通信设备与道路上行驶车辆、自动驾驶车辆或无人驾驶车辆进行数据交互,来满足车辆实现全速智能驾驶的定位要求。
(3)路侧激光雷达:通过路侧激光雷达对道路的完整扫描,可以得到基于点云数据的道路动态环境 4D 重建,将道路信息,包括车辆、行人、非机动车及其它物体全部纳入到 V2X 的数据网络,再利用 RSU 向周边或者更远距离接近的车辆进行广播,为解决智能网联汽车的超远视距和非视距信息感知提供有力支撑。
C、路侧边缘计算(MEC)设备
MEC 需要具备多设备连接能力,接入 RSU、OBU、智能化交通控制设施(交通信号灯、标志、标线、护栏等)、摄像头、毫米波雷达、激光雷达、各类环境感知设备的信息,同时向上连接云平台;MEC 需要具备多传感器融合处理能力,比如摄像头+激光雷达+毫米波雷达融合分析算法;MEC 还需要具备 ITS 相关协议处理能力,比如针对交叉路口防碰撞预警业务,在车辆经过交叉路口时,MEC 通过对车辆位置、速度及轨迹分析研判,分析出可能存在的碰撞风险,通过 RSU 传输到车辆 OBU,起到预警目的。
D、路侧气象设备
微气象监测系统是一种集气象数据采集、存储、传输和管理于一体的无人值守的气象采集系统。气象监测系统由气象传感器、气象数据采集仪和计算机气象软件三部分组成,可同时监测大气温度、大气湿度、风速、风向、气压、雨量、能见度等气象要素。
E、路侧道路环境监测设备
道路环境监测系统是一种集数据采集、存储、传输和管理于一体的无人值守的监测系统,由路面状况传感器、环境数据采集仪和通讯模块等部分组成。可监测实时路面状况;包括路面温度、湿滑程度、积水厚度、覆冰厚度、积雪厚度等。
4、网联汽车与智慧道路示范区软件平台
武汉经开区示范区项目的软件平台如下:
(1)5G 边云协同管理平台
包括两个部分:边缘侧的边缘计算平台、云端的边云协同管理平台。其中,边缘计算平台部分包含基础设施搭建和应用开发、边缘 PaaS 平台开发以及边缘应用;云端的边云协同管理平台包含边云协同基础设施管理、边云协同 PAAS 管理、边云协同大数据平台和边云协同智能管理平台。
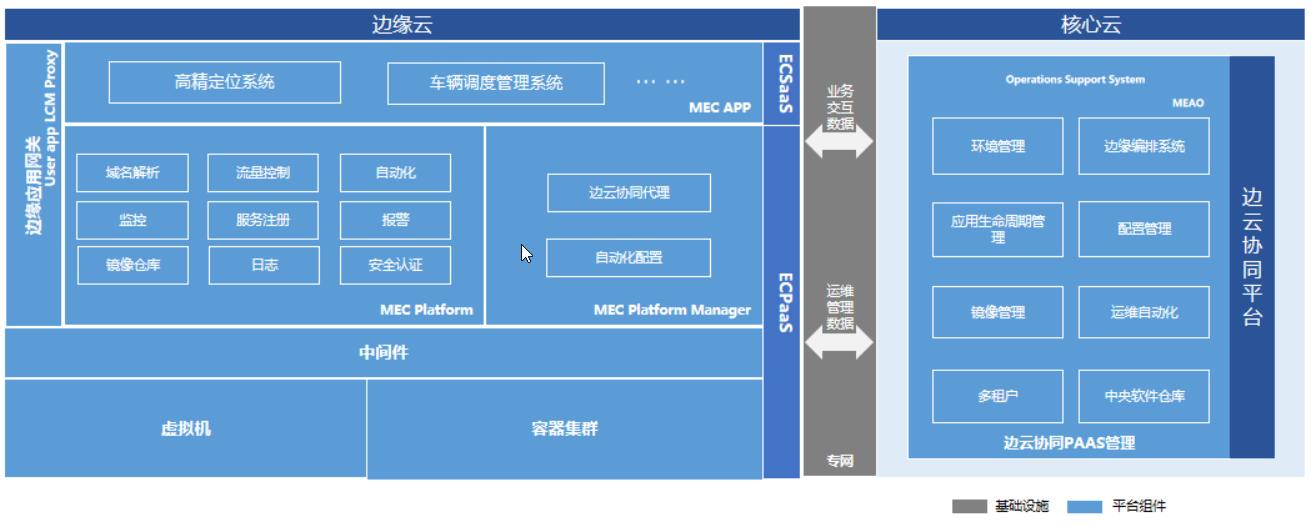
图 3:基于 5G 的边云协同平台架构图
(2)五维时空信息服务管理平台
获取感知范围内的环境数据,助力车路协同,为 5G 网联智能驾驶提供可靠的指导信息,为智慧城市、智慧交通、智慧出行等智慧生活圈的提供高效低功耗的目标感知、事件预警等信息服务。五维时空平台可作为智慧城市建设的基础层,可以促进整个网联智能驾驶体系发展和增强,用路侧感知设备和边缘云设备,使网联汽车感知范围半径范围扩大,可实时获取大量实时路况信息,大大增强了单车感知能力和车路协同能力。总体感知能力的增强,提供车辆周围环境信息,为车辆行驶安全增加了一层安全保障。
(3)基于 5G+北斗的高精度定位平台
基于边云协同整体架构,边缘节点 RTK 解算及多维置信模型,实现可扩展、分布式、高可用、高性能、跨平台且容器化的 GNSS 定位平台。平台以北斗卫星导航系统为主,GPS 等系统为辅,依托完善的运营服务机制、可靠的信息安全体系,提供全天候、全天时、高精度的定位、导航和授时服务,可在区域范围内提供实时米级、亚米级精准定位服务,提供实时厘米级和后处理毫米级高精度服务,为车路协同自动驾驶提供实时厘米级的高精度位置服务。
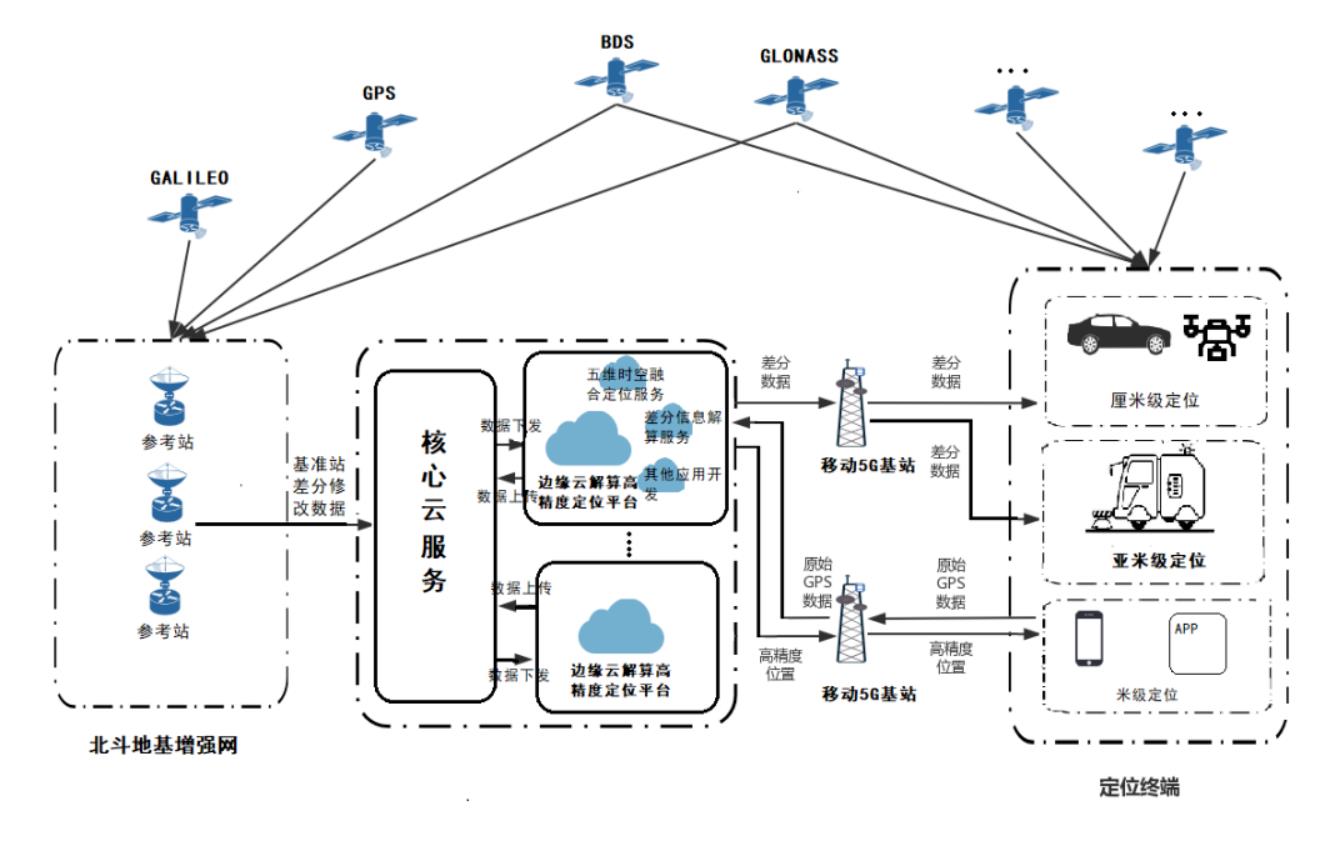
图 4:高精度定位平台系统架构图
(4)车辆监控调度管理平台
通过与网联车辆的交互,实现对网联车辆的管理与控制,支撑网联汽车的自动驾驶。车辆监控调度管理平台为用户提供车辆管理、信息查询、车辆调度、监控管理、系统设置等功能,根据用户权限展示可操作菜单项,实现对车辆信息查询、车辆调度及监控等功能。
(5)智慧交通运行管理平台
结合各地交通管理部门提出的各种业务诉求和自身的数据、业务、计算能力,通过整合移动互联网信息以及各地交管部门的自身数据信息,处理海量移动互联网数据融合传统交通数据,完成对城市交通实时、历史状态的评估和诊断,发现交通问题,并输出根据实时和历史数据对未来道路交通状况预测。
(6)V2X Server 平台
接入 RSU 和车载终端(车载后视镜、OBU)/ 手机 APP,汇聚路侧端和车载端数据,为用户提供 V2X 基础数据服务,支撑车载终端 / 手机 APP 上的 V2X 应用;同时也支持与交警平台、厂商 TSP 平台、图商平台等平台之间的对接,实现信息开放和共享。
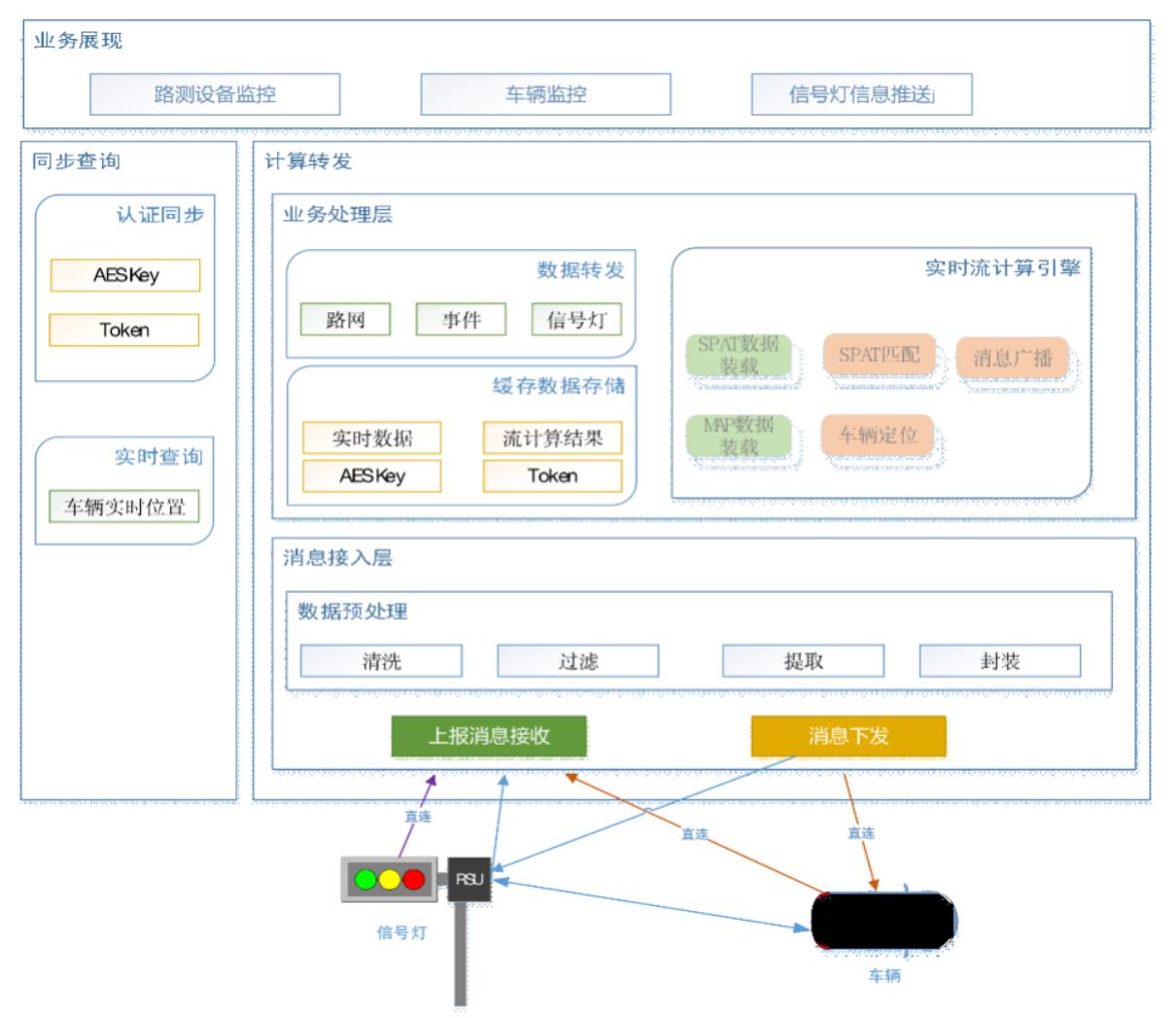
图 5:V2X Server 平台整体架构图
7)设备管理平台
主要围绕设备的实时监测进行智能监管,对接各硬件接口或网管平台,对接口数据进行脱敏、封装、存储处理。实现对路侧设备分析、处理、展示、查询、标记和定位。便于统筹管理所有路侧设备,提供安全可靠信息。
(8)危险车辆管理平台
主要通过事前行政审批、事中过程管控、事后闭环管理以及大数据展示来实现对城市道路危险运输车辆进行智能化管控。
(9)运营平台
用以满足不同 V2X 的应用场景,各种应用场景之间相互交互形成一个闭环的生态系统,辅助车辆实现与一切可能影响它的实体实现信息交互,真正实现无人自动驾驶。同时,运营平台可根据数据的汇集和数据汇总进行深度的挖掘,来展现车辆应用过程中出现的各种问题,为车辆技术的优化提供相应的技术支持方案,以及为车辆的运营提供商业模式的应用示范。
5、结束语
5G 车路协同自动驾驶是依托信息通信技术,通过车内、车与车、车与路、车与人、车与服务平台的全方位连接和数据交互,提供综合信息服务,形成汽车、电子、信息通信、道路交通运输等行业深度融合的新型产业形态,有利于推动智能交通,促进自动驾驶技术创新和应用,提高交通效率、减少污染、促进信息消费,对我国实施创新驱动发展、推进供给侧结构性改革、建设制造强国、网络强国和交通强国具有重大意义。未来的 5G 车路协同自动驾驶示范区,将推进智能网联汽车与智慧交通、智慧城市融合发展,形成涵盖下一代汽车研发设计、智能终端制造、智慧交通和智慧城市应用的完备产业体系,不断填补智能网联汽车发展的技术空白,谱写智能网联汽车发展的新篇章。
参考文献
[1]刘恒; 王德远 . 智慧道路示范区项目研发与经验分享[J]. 信息通信 . 2020(01).
[2]周桥立; 李睿硕 . 基于车路协同的开放道路应用场景落地研究[J]. 信息通信 . 2020(02).
[3]王润民; 张心睿; 王由道; 张雷; 朱宇 . 自动驾驶封闭测试场地建设技术研究与实践[J]. 汽车实用技术 . 2020(02).
[4]丁绪涛; 吉鹏; 王德远 . 武汉经开区智能汽车驾驶示范区经营模式探讨[J]. 信息通信 . 2019(12).
[5]许幸荣; 刘琪; 宋蒙 . 基于 5G+C-V2X 的园区出行解决方案[J]. 邮电设计技术 . 2020(02).
[6]全永华; 白羽 . 基于 5G 通信的车联网自动驾驶关键技术[J]. 计算机产品与流通 . 2020(02).
[7]程婕; 陈建峰 . 一种基于 5G 的车路协同自动驾驶技术架构[J]. 信息通信 . 2019(12).
[8]李秀知 . 一种基于多维时空融合的车路协同系统[J]. 信息通信 . 2019(12).
[9]施媛媛; 邬小鲁; 冯霏; 蔡嘉 . 基于 5G 网络的自动驾驶研究[J]. 信息通信 . 2019(08).
以上是关于5G车路协同自动驾驶应用研究的主要内容,如果未能解决你的问题,请参考以下文章