只需1秒,无人机就能平地翻跟头 | IEEE
Posted QbitAl
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了只需1秒,无人机就能平地翻跟头 | IEEE相关的知识,希望对你有一定的参考价值。
萧箫 发自 凹非寺
量子位 报道 | 公众号 QbitAI
翅膀轻轻一推,无人机翻身只需1.1秒:

迅速旋转翅膀,调整成能减轻飞行重量的的角度:

在你反应过来之前,它已经“嗖”的一下从地上起飞了:

不仅平地能轻松翻身,碎石地、木屑地、斜坡也能轻松handle,简直像甲虫一样灵活~

目前,这项研究已经登上IEEE。再也不用担心自己的无人机掉在奇怪的地方了!

披了件甲虫的“外衣”
这架无人机,确实也参考了甲虫,用上了两对翅膀:鞘翅(elytron)和后翅(hind-wing)。
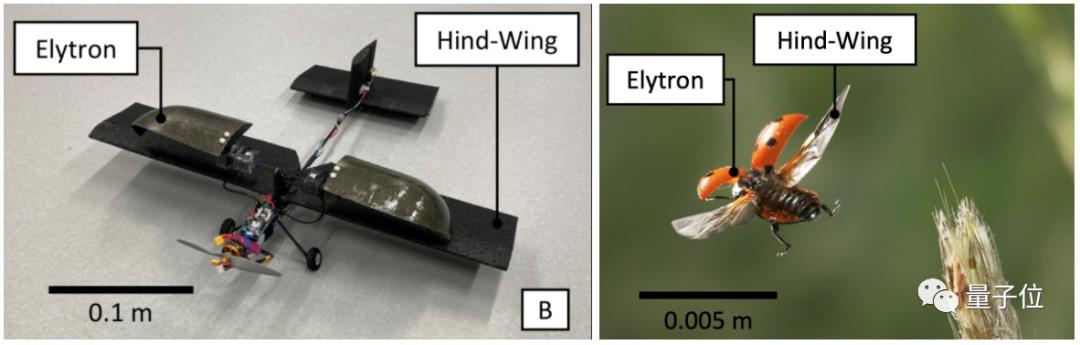
其中,鞘翅主要负责“翻身”、保护机翼和提供上升动力,后翅则主要负责飞行。
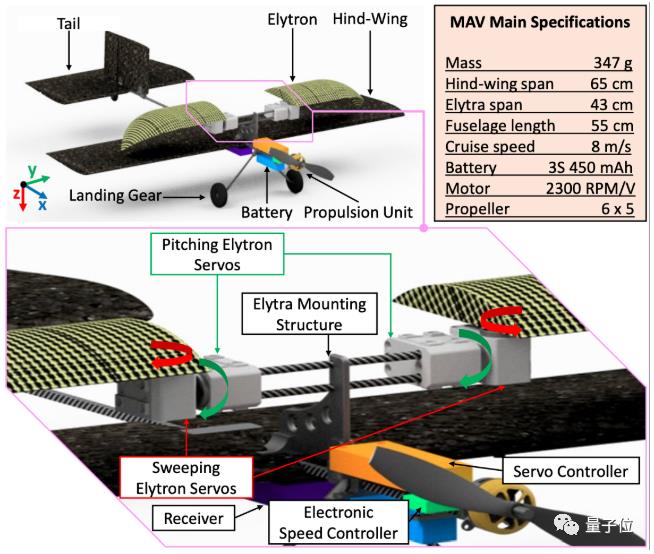
下图是这架无人机的机身构造图。

从图中可见,要控制这对鞘翅,需要用到鞘翅俯仰控制伺服系统(pitching elytron servos)。
伺服系统,用于精确地跟随或复现某个过程的反馈控制系统,使物体的位置、方位、状态,能跟随输入目标(或给定值)进行灵活变化,能有效调节力矩、速度和位置。
其中,伺服系统主要依靠伺服电机提供动力,控制鞘翅做出扭转或平移的动作来。
无人机的其他部件参数如下:
经过实验发现,鞘翅越长,无人机“翻身”的成功率更高、所需时间更短。因此团队最后选择了17cm的鞘翅。

这就轻松解决了小型无人机在“躺平”时,需要人手动调整的麻烦。
同时,机翼还能在无人机上升时提供动力。
这个“甲虫”无人机的性能如何?
只需1.1秒,斜坡平地都能翻
从翻身速度来看,这架无人机只需要1秒左右就能“鲤鱼打挺”,直接翻过来。

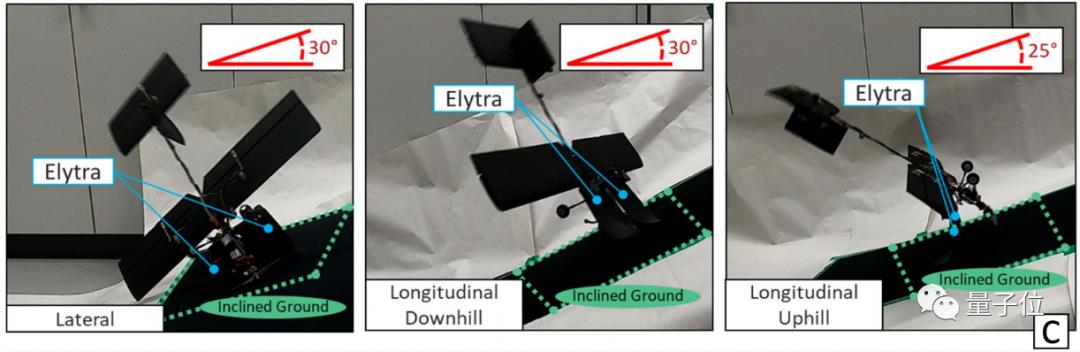
当然,设计后的无人机,地形适应能力也非常强,包括斜坡和不同路面都能进行翻身。
从斜坡来看,这架无人机在最高30°的斜坡上也能成功翻身(超过30°会打滑):
从路面类型来看,这个无人机在人行道、碎石路面、洒满木屑的地面等5种地形上都能达到100%成功翻身的效果。
至于草地和沙地这种比较复杂的地形,成功率也在20%~40%左右。

从设计来看,相比于其他自适应机器人而言,“甲虫”无人机在设计上要简洁得多。
例如,“扶墙走”或是“变形”的自适应机器人,往往需要复杂的机械系统设计;而参考蟑螂设计的飞行机器人,又无法伸展机翼、提供升力。
至于普通的无人机,为了防止翻倒所做的一些设计,更是只能增加重量、降低动力。
但给无人机加上一对甲虫翅膀后,不仅能给飞机提供上升动力、调整位置,还极大地降低了设计的复杂程度。
这让网友想到了Minecraft里面的鞘翅。作为一种飞行工具,鞘翅在滑翔时会向两边展开:

△图源:推特@Minecraft Dungeons
现在,游戏中的效果已经在无人机上实现了。
团队介绍
几名作者均来自瑞士洛桑联邦理工学院(EPFL)的智能系统实验室。
实验室侧重于AI和机器人研究方向,包括生物机器人、人机融合等。

实验室负责人是Dario Floreano,引用次数达到28341次,单篇论文最高引用次数2500+。

这篇论文的一作Charalampos Vourtsis,除了做机器人以外,也会制作一些3D打印项目和计算机视觉方向的东西,例如3D打印树莓派。

接下来,团队还想进一步优化这个无人机,使它成为一个“保护壳”,保护机翼在刮蹭时不受损。
想要详细了解甲虫无人机的小伙伴,可以戳下方论文查看。
论文地址:
https://ieeexplore.ieee.org/document/9479684
参考链接:
[1]https://spectrum.ieee.org/tech-talk/robotics/drones/nothing-can-keep-this-drone-down
[2]https://minecraft.fandom.com/wiki/Elytra
以上是关于只需1秒,无人机就能平地翻跟头 | IEEE的主要内容,如果未能解决你的问题,请参考以下文章
AutoX江苏超级工厂首曝光!机械臂随处可见,车辆出厂就能完全无人驾驶