无人机集群编队解决方案,适应多种飞行场景
Posted 阿木实验室
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了无人机集群编队解决方案,适应多种飞行场景相关的知识,希望对你有一定的参考价值。
针对集群研究人员的痛点,阿木实验室设计了无人机集群编队的开发平台,让开发者们无需再为了验证自己的集群算法或代码而发愁,只需关心集群相关的研究。
无人机集群编队开发平台基于开源无人机项目Prometheus,可在任何运行Prometheus机载系统的无人机上实现组网通信。使用者可通过ROS界面实现一键操作,方便用户快速上手;支持LitttleBee-1、P200、P230、P450、P600等多种机型,配套软件代码完全开源且标有详细的注释,便于用户快速掌握相关控制接口及二次开发能力。支持GPS(RTK)、UWB、Mocap等定位方式,能够适应绝大部分的无人机集群飞行场景以及用户需求。
在通信上,实现了机间两两通信,任意一架无人机均可获取其他无人机的信息以及控制其他无人机飞行。
GPS编队演示
基于RTK定位的10机集群编队
UWB室内三机编队飞行
MOCAP动捕无人机编队演示
无人机集群开发平台系统简述

软件框架图

支持多款型号

支持多种定位方式编队

-
GPS(RTK)集群编队:适用于室外飞行,采用GPS的定位方式,GPS定位的精度为米级,若想提高定位精度,可以在无人机平台上加装RTK模块,实现厘米级定位。
-
UWB集群编队:适用于室内外飞行,采用UWB模块进行定位,定位精度在5-30cm之间,UWB对环境要求较高,遮挡物或磁干扰会对定位精度有影响,如地底下的较多铁条会对定位产生影响。
-
动作捕捉(Mocap)集群编队:适用于室内飞行,采用动作捕捉摄像头进行定位,可以提供无人机、无人车或其他运动机器人低延迟、高精准的六自由度刚体跟踪,定位精度可以达到毫米级甚至是亚毫米级。
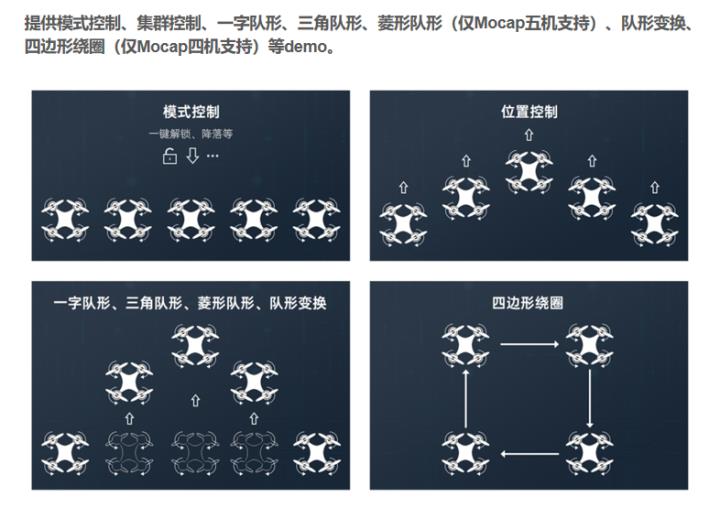
支持功能
案例展示

配套资料
无人机集群编队开发平台拥有Github项目、产品Wiki及官方使用说明的技术支持。此外,还提供与真机功能相对应的ROS仿真教程。通过阿木实验室提供的仿真镜像,用户可通过在电脑上安装镜像的方式,直接解决在配置仿真环境的过程中遇到的各种问题,快速上手开发工作。
同时,集群编队也可与阿木实验室的相关课程配套使用,帮助无人机开发者度过从原理入门到独立开发的学习过程。本课程介绍了Prometheus项目中无人机集群相关内容,讲解了无人机的仿真环境,软件框架以及仿真环境搭建,并且演示了无人机集群demo的操作流程。学完该课程后,学员能够初步掌握Prometheus项目中无人机集群的相关内容。
无人机集群编队开发平台享有阿木实验室的官方售后服务。用户除自主获取的资料外,还可参与到阿木社区与Prometheus官方交流群的讨论中。获取技术大牛的最新研发动态,得到资深技术团队的最权威答疑;更进一步为开源的精神做出贡献。
以上是关于无人机集群编队解决方案,适应多种飞行场景的主要内容,如果未能解决你的问题,请参考以下文章