盘点表示学习(Representation Learning)发展中的逻辑
Posted SoaringPigeon
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了盘点表示学习(Representation Learning)发展中的逻辑相关的知识,希望对你有一定的参考价值。
Logic in Representation Learning
对比学习(Contrastive Learning) 是判别式自监督学习的一种,不依赖标注数据,要从无标注图像中自己学习知识。通过自动构造相似实例和不相似实例,要求习得一个表示学习模型,通过这个模型,使得相似的实例在投影空间中比较接近,而不相似的实例在投影空间中距离比较远。而如何构造相似实例,以及不相似实例,如何构造能够遵循上述指导原则的表示学习模型结构,以及如何防止模型坍塌(Model Collapse),这几个点是其中的关键。目前 对比学习(Contrastive Learning) 的经典模型有Moco系列、SimCLR系列、BYOL、SwAV、DeepCluster系列、Barlow Twins等。
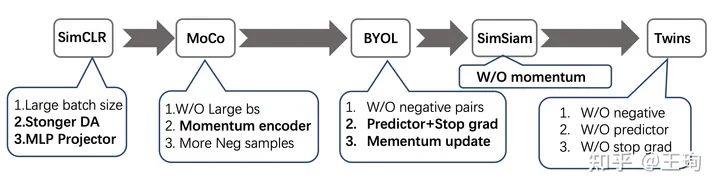
从防止模型坍塌的不同方法角度,我们可大致把现有方法划分为:
- 基于负例的对比学习方法
- 基于对比聚类的方法
- 基于非对称网络结构的方法
- 基于冗余消除损失函数的方法
其实我觉得防止模型坍塌还有种是通过有监督Loss约束,但这样就不是纯粹的对比学习,将成为半监督学习的方法,可以参考MeanTeacher、SE-SSD等文章如何防止模型坍塌(Model Collapse)。
基于负例的对比学习:
【以SimCLR为例】
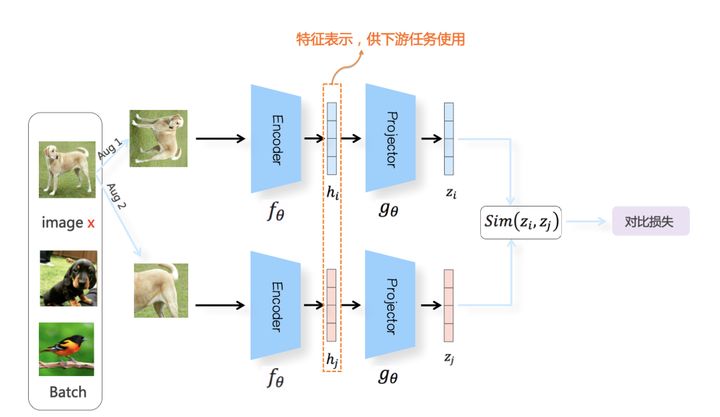
对比学习是自监督学习,我们没有标注数据,所以需要如下图所示,自己构造相似数据(正例)以及不相似数据(负例)
对于某张图片,我们从可能的增强操作集合
T
T
T中,随机抽取两种:
t
1
∼
T
t_1 \\sim T
t1∼T 及
t
2
∼
T
t_2 \\sim T
t2∼T ,分别作用在原始图像上,形成两张经过增强的新图像
<
x
1
,
x
2
>
<x_1,x_2>
<x1,x2>,两者互为正例。训练时,Batch内任意其它图像,都可做为
x
1
x_1
x1或
x
2
x_2
x2的负例。
有了正例和负例,接下来需要做的是:构造一个表示学习系统,通过它将训练数据投影到某个表示空间内,并采取一定的方法,使得正例距离能够比较近,负例距离比较远。
A
u
g
1
Aug1
Aug1首先经过特征编码器Encoder(2D卷积)
f
θ
f_\\theta
fθ 转换成对应的特征表示
h
i
h_i
hi ,然后经过非线性变换结构Projector(两层MLP)
g
θ
g_\\theta
gθ,进一步将特征表示
h
i
h_i
hi 映射成另外一个空间里的向量
z
i
z_i
zi。同样地,
A
u
g
2
Aug2
Aug2 经过同样Encoder和Projector映射成
z
j
z_j
zj。
在表示空间
Z
Z
Z 内,我们希望正例距离较近,负例距离较远。如果希望达成这一点,一般通过定义合适的损失函数来实现。在介绍损失函数前,我们首先需要一个度量函数,以判断两个向量在投影空间里的距离远近,一般采用对表示向量
L
2
L_2
L2 正则后的点积 或者表示向量间的 Cosine相似性
S
(
z
i
,
z
j
)
=
z
i
T
z
j
]
]
z
i
]
]
2
]
]
z
j
]
]
2
S(z_i,z_j) = \\frac{z_i^Tz_j}{]]z_i]]_2]]z_j]]_2}
S(zi,zj)=]]zi]]2]]zj]]2ziTzj 来作为距离度量标准。
SimCLR的损失函数采用InfoNCE Loss
L
i
=
−
l
o
g
(
e
x
p
(
S
(
z
i
,
z
i
+
)
τ
)
∑
(
j
=
0
)
K
e
x
p
(
S
(
z
i
,
z
j
)
τ
)
)
L_i=-log(\\frac{exp(\\frac{S(z_i,z_i^+)}{\\tau})}{\\sum_{(j=0)}^K exp(\\frac{S(z_i,z_j)}{\\tau})})
Li=−log(∑(j=0)Kexp(τS(zi,zj))exp(τS(zi,zi+)))
其中,
<
z
i
,
z
i
+
>
<z_i,z_i^+>
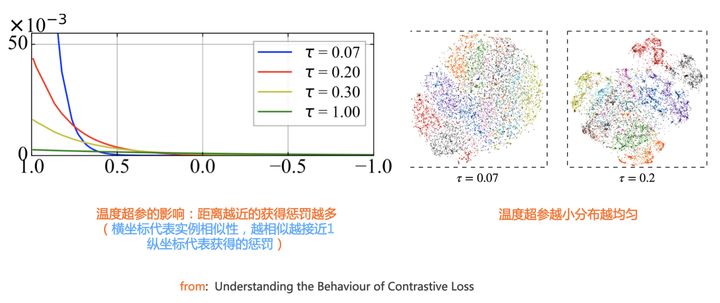
<zi,zi+>代表两个正例相应的表示向量;负例个数K是一个超参,K数值可以根据需要调整大小;温度超参
τ
\\tau
τ一般设置0.1或者0.2,它将模型训练聚焦到有难度的负例,并对它们做相应的惩罚,难度越大,也即是与
x
i
x_i
xi 距离越近,则分配到的惩罚越多。
τ
\\tau
τ越小,模型学到的一致性信息就越少,多样性信息就越多,我们需要在一致性和多样性之间寻求一种平衡
这会引发一个问题:为什么这种投影操作,要做两次非线性变换,而不是直接在Encoder后,只经过一次变换即可呢?
实验证明,加上这个Projector对于提升模型效果改进很明显,这从经验角度说明两次投影变换是必须的。个人猜测,在接近任务的高层网络,也就是Projector,会编码更多跟对比学习任务相关的信息,低层就是Encoder,会编码更多跟任务无关的通用细节信息。对于下游任务,这种对比学习训练任务相关的高层特征,可能会带来负面影响。如果映射网络只包含Encoder的话,那么特征表示里会有很多预训练任务相关特征,会影响下游任务效果;而加上Projector,等于增加了网络层深,这些任务相关特征就聚集在Projector,此时Encoder则不再包含预训练任务相关特征,只包含更通用的细节特征,这样训练好的Encoder作为下游任务的预训练模型效果会更好。
Contribution:
- 证明了复合图像增强很重要
- 在Moco的Encoder结构后添加这个Projector结构并实验证明很有效
在此之后的对比学习模型,基本都采取了Encoder+Projector的两次映射结构,以及复合图像增强方法。
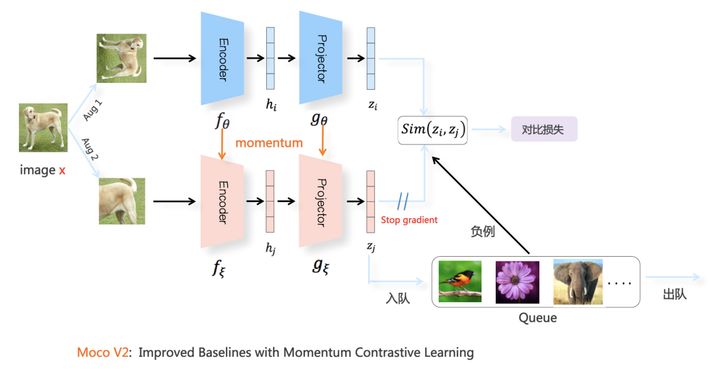
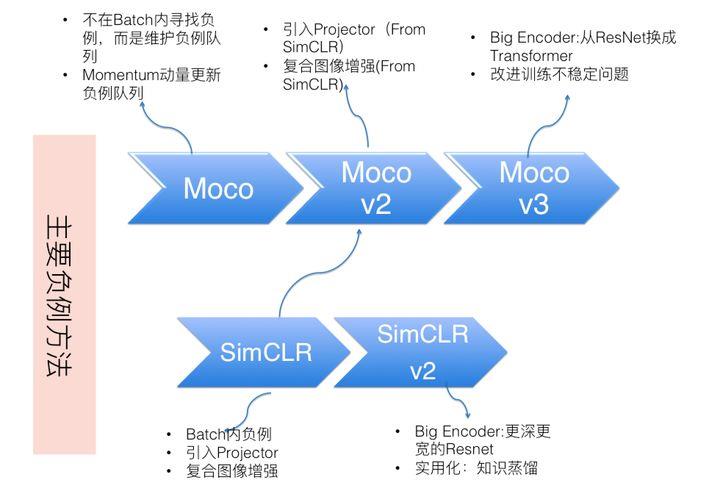
Batch之外【以MocoV2为例】
很多实验证明了:在基于负例的对比学习中,负例数量越多,对比学习模型效果越好,其实本质上,是因为越多负例,会包含更多的Hard负例,而这些Hard负例对于模型贡献较大,而easy负例,其实没多少贡献。因此一个自然的想法诞生了:不再局限于Batch内寻找负例 。
Moco V2是在整个训练集合内选择负例的典型方法,其实这个做法主要是Moco 提出的,Moco V2是吸收了SimCLR的Projector结构,以及更具难度的图像增强方法之后,针对Moco 的改进版本。
Contribution:
- 不再局限于Batch内寻找负例
- 下分支采用动量更新(Momentum Update)机制,而非SimCLR中的参数共享
下分枝的 动量更新(Momentum Update) 模型结构有两个作用:一个是将第二组图像增强视图 A u g 2 Aug2 Aug2 里的图像,映射到对应的表示空间编码 z j z_j zj ,为第一组图像增强视图 A u g 1 Aug1 Aug1 提供正例;第二个作用是更新负例队列里数据的图像表示编码:一般会将最新Batch里Aug2对应的特征表示编码放入队列,而最老的那个Batch对应的图像编码出队,这样就可以不断更新负例队列内负例编码内容。
新问题来了:为什么负例队列里的图像编码,不用上分枝对应的最新的模型参数
θ
\\theta
θ ,而是采用缓慢移动的
ξ
\\xi
ξ 来更新呢?
下分枝的正例和负例参数缓慢而稳定的变动,才能提供较好的模型效果。这可能是因为缓慢更新的模型参数
ξ
\\xi
ξ ,给队列中来自不同Batch内的实例表征编码相对稳定而统一的改变,增加了表示空间的一致性。
基于对比聚类的对比学习:负例隐身术【以SwAV为例】
SwAV的模型结构如下图,其中的图像增强、Encoder以及Projector结构,与SimCLR基本保持一致。SwAV对 A u g 1 Aug1 Aug1 和 A u g 2 Aug2 Aug2 中的表示向量,根据Sinkhorn-Knopp算法[Reference:Sinkhorn算法],在线对Batch内数据进行聚类。假设走下分枝的 x j x_j xj 聚类到了 q j q_j qj 类,则SwAV要求表示学习模型根据 x i x_i xi 预测 x j x_j xj 所在的类,也就是说,要将 z i z_i zi 分到第 q j q_j qj类,具体损失函数采用 z i z_i zi 和 P r o t o t y p e Prototype Prototype 中每个类中心向量的交叉熵: L a v g ( z i , q j ) = − ∑ k q j k ⋅ l o g ( p i k ) L_{avg}(z_i,q_j)=-\\sum_kq_j^k \\cdot log(p_i^k) Lavg(ziGraph Representation Learning 图表示学习
(转)Predictive learning vs. representation learning 预测学习 与 表示学习
AI - MLCC08 - 表示法 (Representation)
论文导读Time-Series Representation Learning via Temporal and Contextual Contrasting(时间和上下文对比的时间序列表示学习)