优化求解基于动态全局搜索和柯西变异改进的花授粉算法matlab源码
Posted 博主QQ2449341593
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了优化求解基于动态全局搜索和柯西变异改进的花授粉算法matlab源码相关的知识,希望对你有一定的参考价值。
一、花朵授粉算法
花朵授粉算法( Flower Pollination Algorithm,FPA)是由英国剑桥大学学者Yang于2012年提出的,其基本思想来源于对自然界花朵自花授粉、异花授粉的模拟,是一种新的元启发式群智能随机优化技术 。算法中为了简便计算,假设每个植物仅有一朵花,每朵花只有一个配子,我们可以认为每一个配子都是解空间中的一个候选解。
Yang通过对花朵授粉的研究,抽象出以下四大规则:
1) 生物异花授粉被考虑为算法的全局探测行为,并由传粉者通过Levy飞行的机制实现全局授粉;
2)非生物自花授粉被视作算法的局部开采行为,或称局部授粉;
3)花朵的常性可以被认为是繁衍概率,他与两朵参与授粉花朵的相似性成正比例关系;
4)花朵的全局授粉与局部授粉通过转换概率 p∈[0,1]进行调节。 由于物理上的邻近性和风等因素的影响,在整个授粉活动中,转换概率 p是一个非常重要的参数。 文献[1]中对该参数的试验研究认为,取 p =0.8 更利于算法寻优。
直接上步骤(以多元函数寻优为例):
目标函数 : min g = f(x1,x2,x3,x4...........xd)
设置参量:N(候选解的个数),iter(最大迭代次数),p(转换概率),lamda(Levy飞行参数)
初始化花朵,随机设置一个NXd的矩阵;
计算适应度,即函数值;
获取最优解和最优解得位置;
A循环 1 : 1 :iter
B循环
if rand < p
全局授粉;
else
局部授粉;
end if
更新新一代的花朵与适应度(函数变量和函数值);
B循环end
获取新一代的最优解与最优解位置;
A循环end
全局更新公式:xi(t+1) = xi(t) + L(xi(t) - xbest(t)) L服从Levy分布,具体可以搜索布谷鸟算法。
局部更新公式:xi(t+1) = xi(t) + m(xj(t) - xk(t)) m是服从在[0,1]上均匀分布的随机数。其中,xj和xk是两个不同的个体
二、基于动态全局搜索和柯西变异的花授粉算法
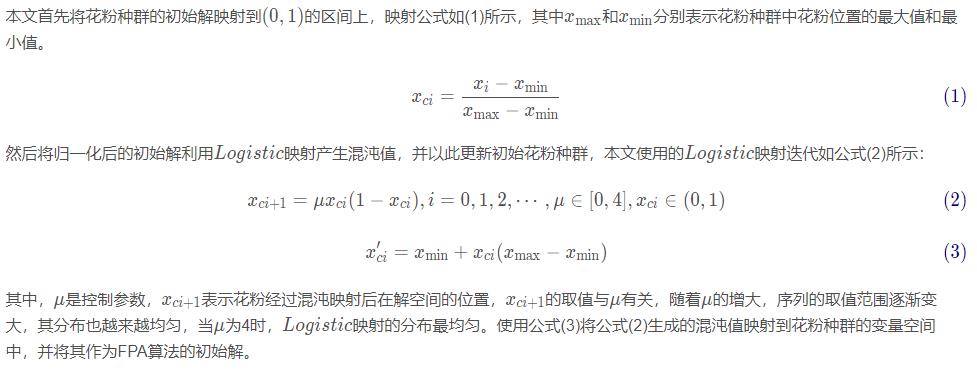
(1)混沌映射
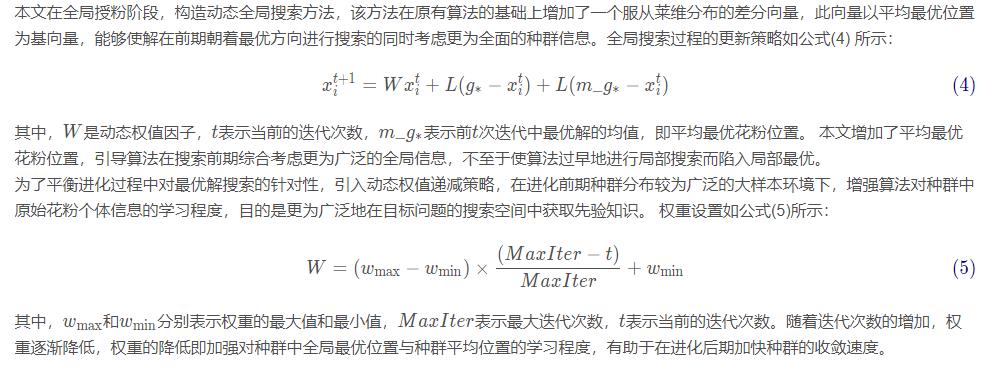
(2)动态全局搜索方法
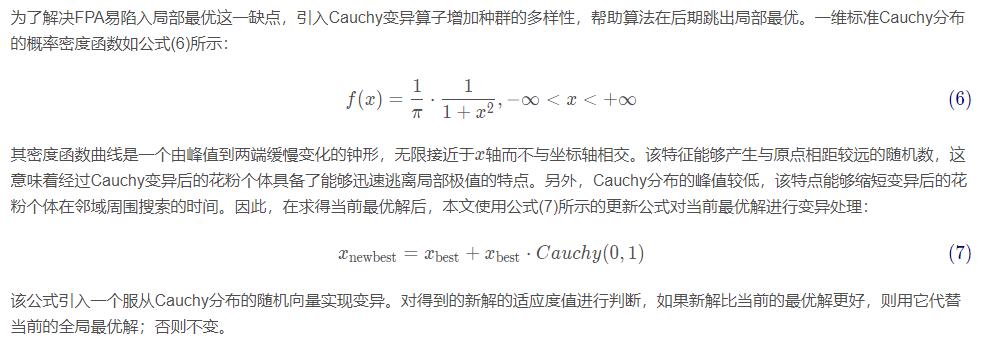
(3)基于柯西变异的优化方法
(4)DCFPA的实现流程图
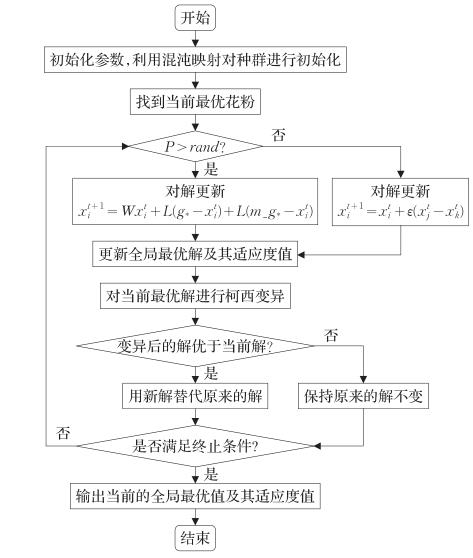
图1 DCFPA流程图
二、演示代码
%__________________________________________
% fobj = @YourCostFunction
% dim = number of your variables
% Max_iteration = maximum number of generations
% SearchAgents_no = number of search agents
% lb=[lb1,lb2,...,lbn] where lbn is the lower bound of variable n
% ub=[ub1,ub2,...,ubn] where ubn is the upper bound of variable n
% If all the variables have equal lower bound you can just
% define lb and ub as two single number numbers
% To run ALO: [Best_score,Best_pos,cg_curve]=ALO(SearchAgents_no,Max_iteration,lb,ub,dim,fobj)
% The Whale Optimization Algorithm
function [Leader_score,Leader_pos,Convergence_curve]=WOA(SearchAgents_no,Max_iter,lb,ub,dim,fobj,handles,value)
% initialize position vector and score for the leader
Leader_pos=zeros(1,dim);
Leader_score=inf; %change this to -inf for maximization problems
%Initialize the positions of search agents
Positions=initialization(SearchAgents_no,dim,ub,lb);
Convergence_curve=zeros(1,Max_iter);
t=0;% Loop counter
% Main loop
while t<Max_iter
for i=1:size(Positions,1)
% Return back the search agents that go beyond the boundaries of the search space
Flag4ub=Positions(i,:)>ub;
Flag4lb=Positions(i,:)<lb;
Positions(i,:)=(Positions(i,:).*(~(Flag4ub+Flag4lb)))+ub.*Flag4ub+lb.*Flag4lb;
% Calculate objective function for each search agent
fitness=fobj(Positions(i,:));
All_fitness(1,i)=fitness;
% Update the leader
if fitness<Leader_score % Change this to > for maximization problem
Leader_score=fitness; % Update alpha
Leader_pos=Positions(i,:);
end
end
a=2-t*((2)/Max_iter); % a decreases linearly fron 2 to 0 in Eq. (2.3)
% a2 linearly dicreases from -1 to -2 to calculate t in Eq. (3.12)
a2=-1+t*((-1)/Max_iter);
% Update the Position of search agents
for i=1:size(Positions,1)
r1=rand(); % r1 is a random number in [0,1]
r2=rand(); % r2 is a random number in [0,1]
A=2*a*r1-a; % Eq. (2.3) in the paper
C=2*r2; % Eq. (2.4) in the paper
b=1; % parameters in Eq. (2.5)
l=(a2-1)*rand+1; % parameters in Eq. (2.5)
p = rand(); % p in Eq. (2.6)
for j=1:size(Positions,2)
if p<0.5
if abs(A)>=1
rand_leader_index = floor(SearchAgents_no*rand()+1);
X_rand = Positions(rand_leader_index, :);
D_X_rand=abs(C*X_rand(j)-Positions(i,j)); % Eq. (2.7)
Positions(i,j)=X_rand(j)-A*D_X_rand; % Eq. (2.8)
elseif abs(A)<1
D_Leader=abs(C*Leader_pos(j)-Positions(i,j)); % Eq. (2.1)
Positions(i,j)=Leader_pos(j)-A*D_Leader; % Eq. (2.2)
end
elseif p>=0.5
distance2Leader=abs(Leader_pos(j)-Positions(i,j));
% Eq. (2.5)
Positions(i,j)=distance2Leader*exp(b.*l).*cos(l.*2*pi)+Leader_pos(j);
end
end
end
t=t+1;
Convergence_curve(t)=Leader_score;
if t>2
line([t-1 t], [Convergence_curve(t-1) Convergence_curve(t)],'Color','b')
xlabel('Iteration');
ylabel('Best score obtained so far');
drawnow
end
set(handles.itertext,'String', ['The current iteration is ', num2str(t)])
set(handles.optimumtext,'String', ['The current optimal value is ', num2str(Leader_score)])
if value==1
hold on
scatter(t*ones(1,SearchAgents_no),All_fitness,'.','k')
end
end
四、仿真结果
表1 测试函数基本信息
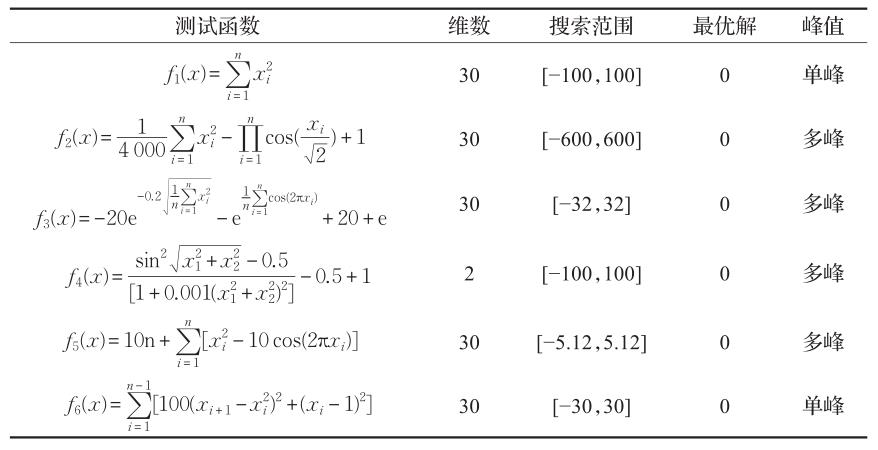 各个函数收敛曲线及结果显示如下:
各个函数收敛曲线及结果显示如下: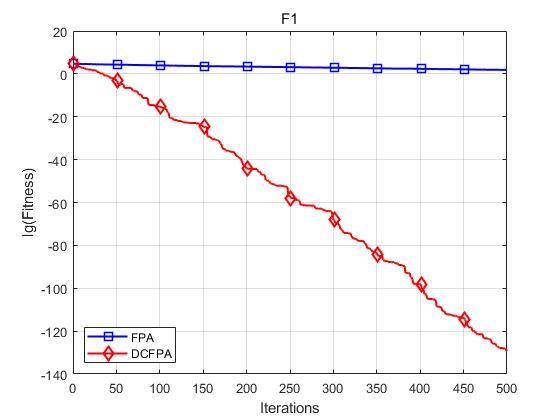
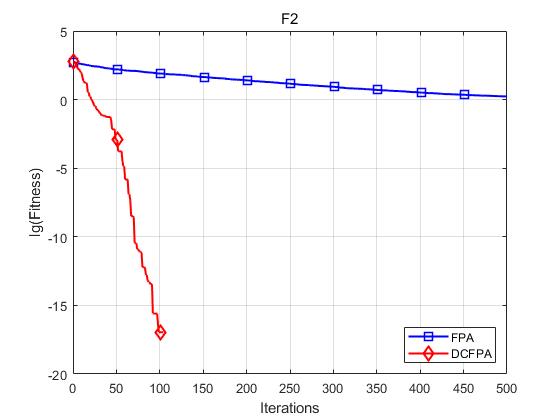
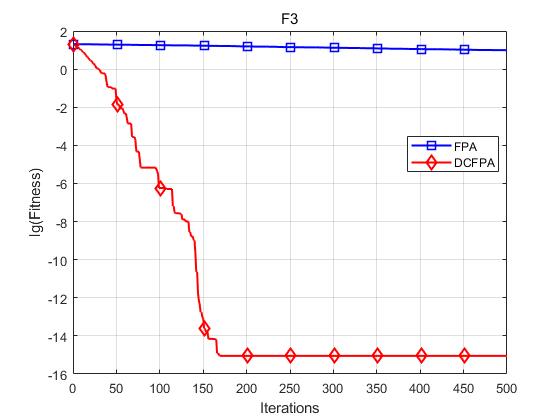
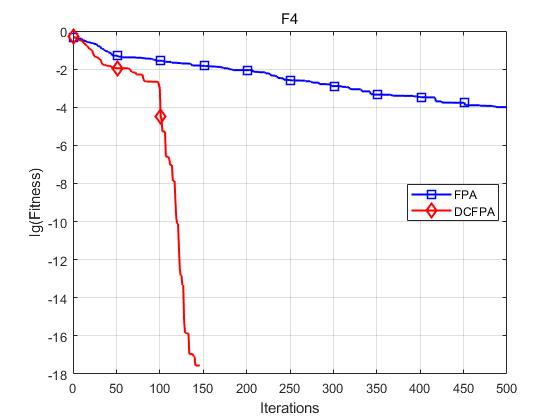
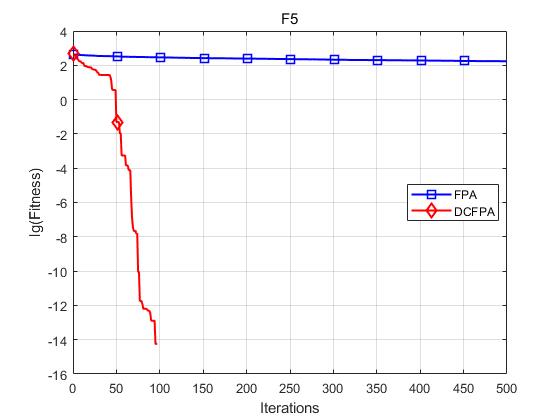
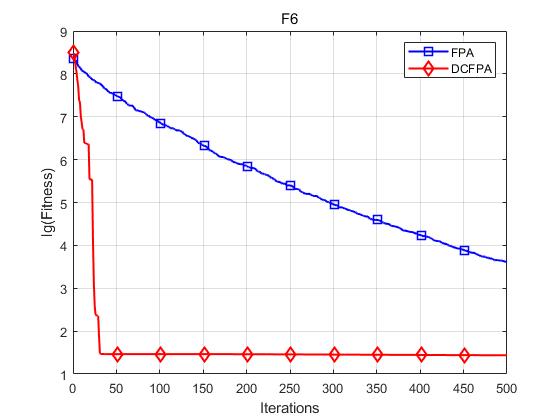
仿真实验表明,DCFPA算法比FPA具有更好的全局优化能力,提升了算法的收敛速度与求解精度。
五、参考文献及代码私信博主
[1] 贺智明, 李文静. 基于动态全局搜索和柯西变异的花授粉算法[J]. 计算机工程与应用, 2019, 55(19): 74-80.
以上是关于优化求解基于动态全局搜索和柯西变异改进的花授粉算法matlab源码的主要内容,如果未能解决你的问题,请参考以下文章