树莓派4B装载ROS系统启动摄像头
Posted ʚVVcatɞ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了树莓派4B装载ROS系统启动摄像头相关的知识,希望对你有一定的参考价值。
树莓派 Raspberry Pi 4 —— 8GB
安装 ros-kinetic-usb-cam 功能包
sudo apt-get install ros-kinetic-usb-cam
如果 sudo apt-get install ros-kinetic-usb-cam 执行失败请参考:
https://blog.csdn.net/qq_44989881/article/details/118682428
配置环境
source ~/catkin_ws/devel/setup.bash
usb_cam安装成功后,可以使用以下命令启动计算机摄像头,进行测试:
roslaunch usb_cam usb_cam-test.launch
通过 rqt_image_view 显示摄像头图像
rqt_image_view
界面左上角的下拉菜单,可以看到当前系统中所有可显示的图像话题列表
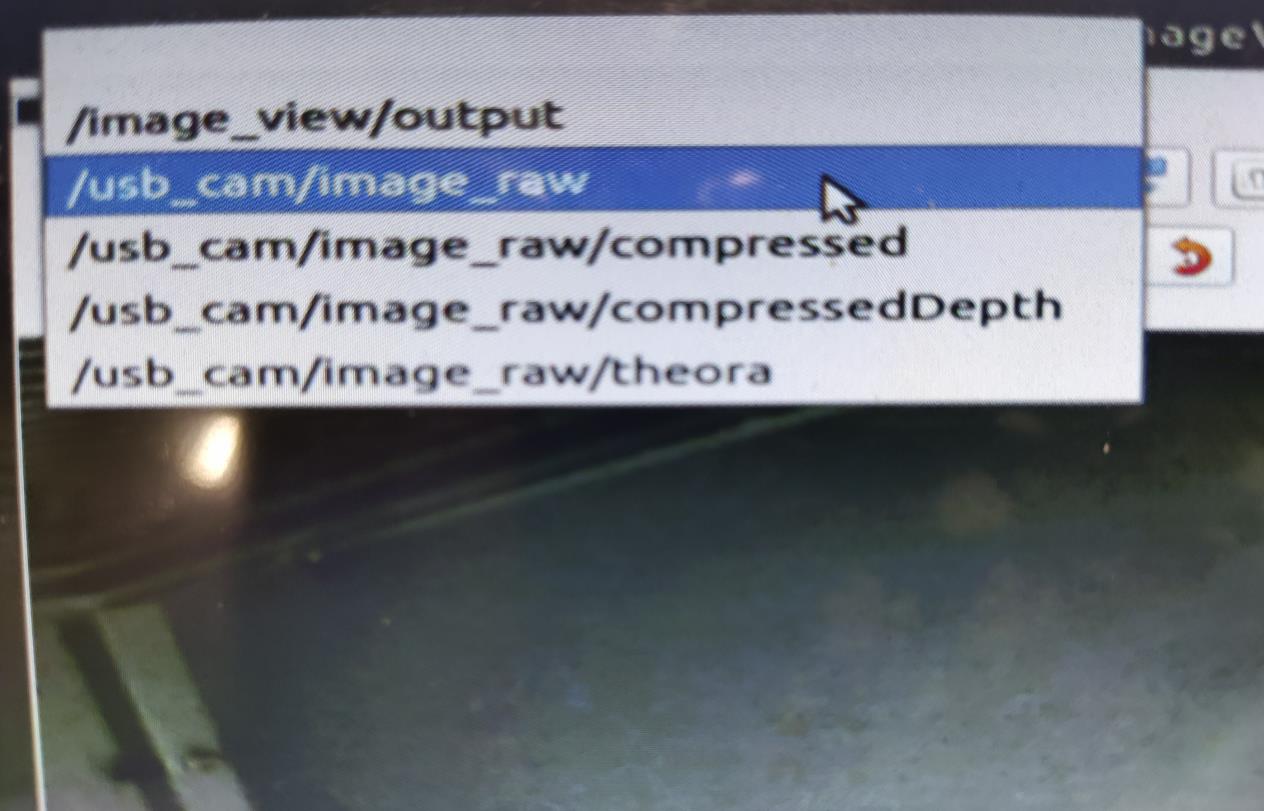
选择列表中的摄像头原始图像/camera/image_raw话题,就可以看到摄像头显示的图像。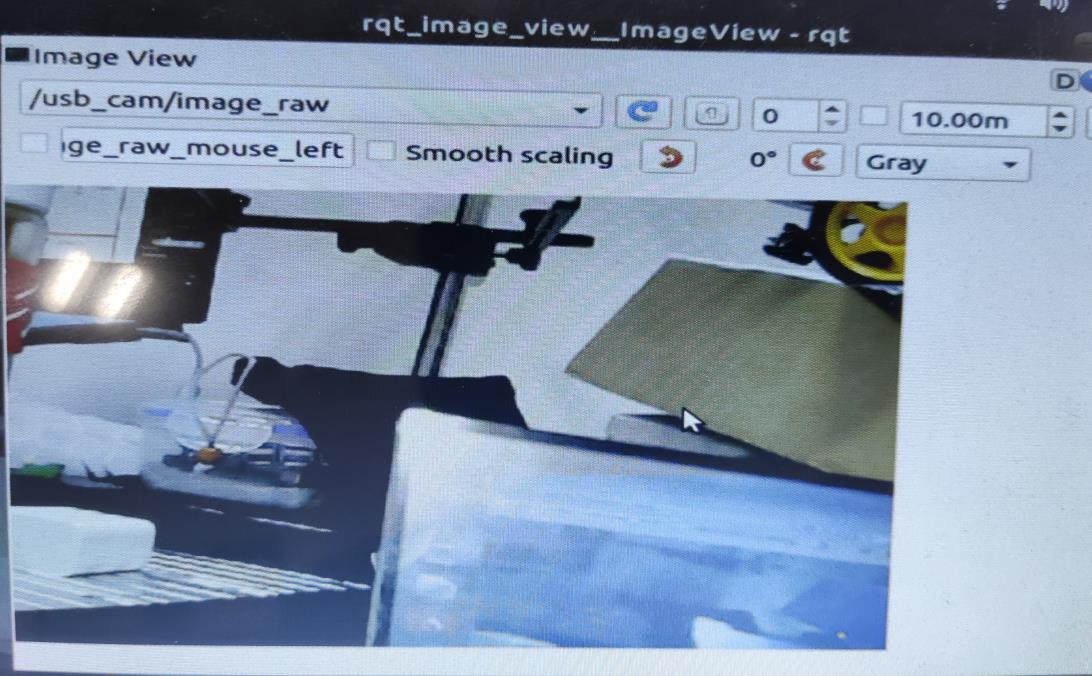
注意:选择 /usb_cam/image_raw/compressed 对图像进行压缩传输。

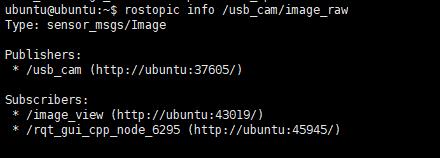
显示图像类型
rostopic info /usb_cam/image_raw
查看图像消息
rosmsg show sensor_msgs/Image
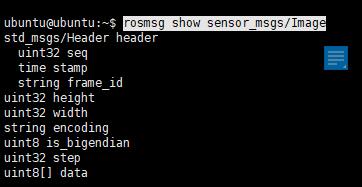
- Header:消息头,包含消息序号,时间戳和绑定坐标系。
- height:图像的纵向分辨率
- width:图像的横向分辨率
- encoding:图像的编码格式,包含RGB、YUV等常用格式,不涉及图像压缩编码。
- is_bigendian:图像数据的大小端存储模式
- step:一行图像数据的字节数量,作为数据的步长参数
- data:存储图像数据的数据,大小为step * height个字节
1080*720分辨率的摄像头产生一帧图像的数据大小是:31080720=2764800字节,即2.7648MB
重新启动摄像头并压缩图像
rostopic info /usb_cam/image_raw/compressed
查看压缩后图像消息
rosmsg show sensor_msgs/CompressedImage
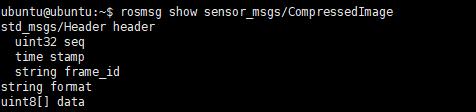
format:图像的压缩编码格式(jpeg、png、bmp)
data:存储图像数据数组
以上是关于树莓派4B装载ROS系统启动摄像头的主要内容,如果未能解决你的问题,请参考以下文章
树莓派4B UbuntuMate20 安装 ROS Noetic 笔记
树莓派4B UbuntuMate20 安装 ROS Noetic 笔记
树莓派4B+Ubuntu22.04 Server安装ROS2 Humble