树莓派 4B安装ubuntu18.04与melodic版ROS
Posted ʚVVcatɞ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了树莓派 4B安装ubuntu18.04与melodic版ROS相关的知识,希望对你有一定的参考价值。
使用的树莓派 Raspberry Pi 4 —— 8GB
在这个连接中http://old-releases.ubuntu.com/releases/bionic/或http://cdimage.ubuntu.com/releases/18.04/release/
找到该镜像:ubuntu-18.04.5-preinstalled-server-armhf+raspi4.img.xz
下载后解压

然后使用 SDFormatter 格式化SD卡
SD卡放入读卡器,插进电脑,打开win32 磁盘映像工具,选取 ubuntu-18.04.5-preinstalled-server-armhf+raspi4.img,选取SD卡,点击写入。
拔下SD卡,插入树莓派,树莓派的 micro hdmi 通过视频线,连接显示屏hdmi口,鼠标、键盘、网线插上树莓派,进行以下操作。
系统启动后,输入初始
用户名:ubuntu
密码:ubuntu
注:会要求更改密码,需要输入两遍。
进入系统后为系统换源:
sudo vim /etc/apt/sources.list
更换的阿里云镜像源,内容全部替换为:
deb https://mirrors.aliyun.com/ubuntu-ports/ bionic main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-security main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-security main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-updates main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-backports main restricted universe multiverse
deb https://mirrors.aliyun.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse
deb-src https://mirrors.aliyun.com/ubuntu-ports/ bionic-proposed main restricted universe multiverse
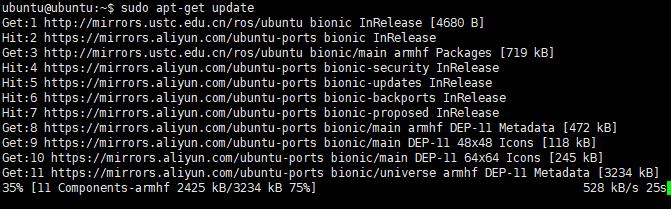
更新系统的软件列表
sudo apt update
安装ubuntu桌面环境
sudo apt-get install ubuntu-desktop
注意:如果中途出错退出,建议尝试重新执行该命令。
安装完成后输入 reboot ,重启后就可以进入桌面环境。
在windows下启动Xshell连接 ubuntu
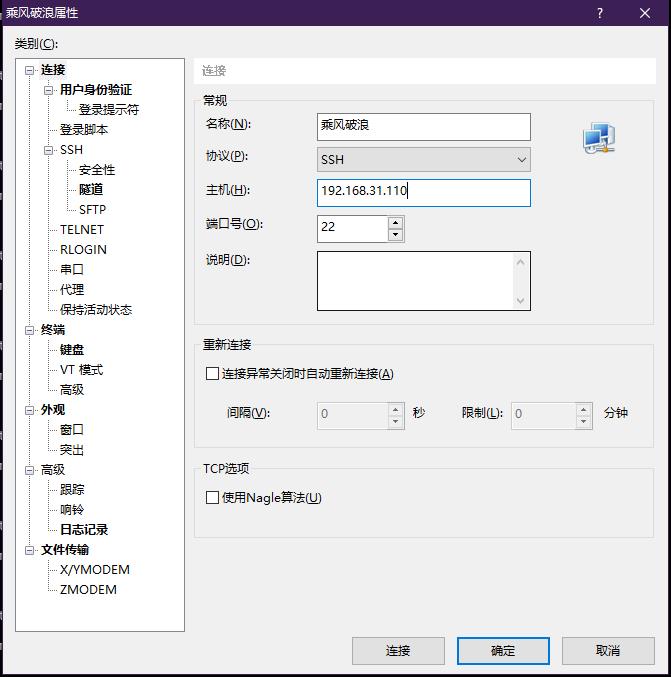
连接成功后可以登录到树莓派进行远程操作
添加ROS软件源
这个链接有很多包含ROS的软件源可供选择:wiki.ros.org/ROS/Installation/UbuntuMirrors
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新软件源
sudo apt-get update
ROS桌面完整安装(推荐):
sudo apt-get install ros-melodic-desktop-full
安装完成后,会发现系统的时间与本地时间不符,通过以下命令设置时区:
timedatectl set-timezone Asia/Shanghai
安装 rospack-tools
sudo apt install rospack-tools
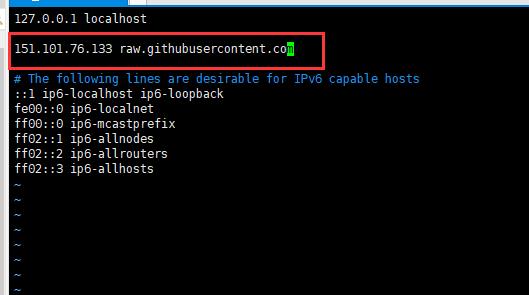
打卡hosts文件
sudo vim /etc/hosts
在hosts文件中添加
151.101.76.133 raw.githubusercontent.com
初始化rosdep
sudo rosdep init
rosdep update
设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc

安装rosinstall
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
启动ROS Master
注:每次启动Ros时需要首先启动RosMaster
此时新打开一个Terminal,然后输入以下指令,可以启动ROS Master
roscore
再次新打开一个Terminal,启动小海龟仿真器
rosrun turtlesim turtlesim_node
再次新打开一个Terminal,启动海龟控制节点
注:启动后在Terminal中按下键盘的左右可以控制海龟的转向,上下控制海龟的移动。
rosrun turtlesim turtle_teleop_key
如下是全部安装成功后在树莓派上显示的 小海龟仿真器
以上是关于树莓派 4B安装ubuntu18.04与melodic版ROS的主要内容,如果未能解决你的问题,请参考以下文章
[Linux] 树莓派 4B 安装 Ubuntu 19.10 (Eoan Ermine) IOT 版