强化学习笔记:连续控制 & 确定策略梯度DPG
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了强化学习笔记:连续控制 & 确定策略梯度DPG相关的知识,希望对你有一定的参考价值。
1 离散控制与连续控制
之前的无论是DQN,Q-learning,A2C,REINFORCEMENT,SARSA什么的,都是针对离散动作空间,不能直接解决连续控制问题。
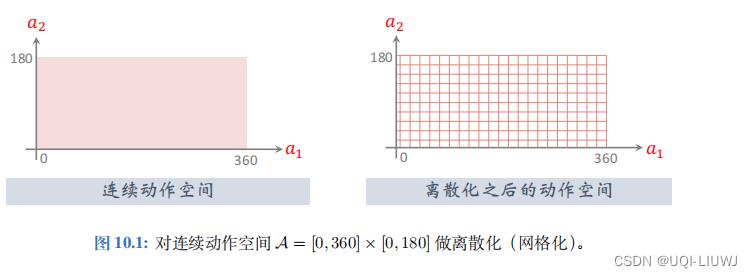
考虑这样一个问题:我们需要控制一只机械手臂,完成某些任务,获取奖励。机械 手臂有两个关节,分别可以在 [0◦, 360◦] 与 [0◦, 180◦] 的范围内转动。这个问题的自由度 是 d = 2,动作是二维向量,动作空间是连续集合 A = [0, 360] × [0, 180]。
如果想把此前学过的离散控制方法应用到连续控制上,必须要对连续动作空间做离散化(网格化)。
比如把连续集合 A = [0, 360] × [0, 180] 变成离散集合 A′ = 0, 20, 40, · · · , 360 × 0, 20, 40, · · · , 180;
- 对动作空间做离散化之后,就可以应用之前学过的方法训练 DQN 或者策略网络,用 于控制机械手臂
- 可是用离散化解决连续控制问题有个缺点。
- 把自由度记作 d。自由度 d 越大,网格上的点就越多,而且数量随着 d 指数增长,会造成维度灾难。
- 动作空间的 大小即网格上点的数量。如果动作空间太大,DQN 和策略网络的训练都变得很困难,强 化学习的结果会不好。
- ——>上述离散化方法只适用于自由度 d 很小的情况;如果 d 不是很小, 就应该使用连续控制方法。
2 确定策略梯度
确定策略梯度 (Deterministic Policy Gradient, DPG)) 是最常用的连续控制方法。 DPG是一种 Actor-Critic 方法,它有一个策略网络(演员),一个价值网络(评委)。 策略网络控制智能体做运动,它基于状态 s 做出动作 a 。 价值网络基于状态 s 给动作 a 打分,从而指导策略网络做出改进。
2.1 确定性策略网络
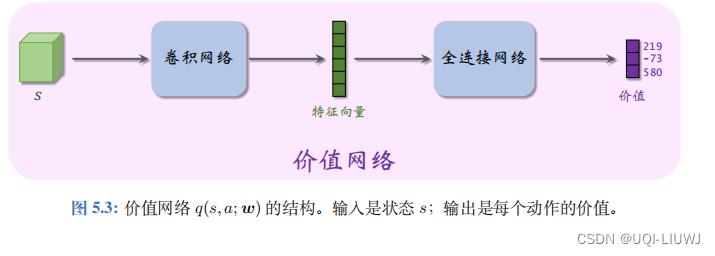
- 这里的策略网络和之前DQN,A2C的策略网络略有不同:
- 在之前的模型里,策略网络 π ( a | s ; θ ) 是 一个概率质量函数,它输出的是概率值【每个动作被执行的概率】。
- 确定策略网络 µ ( s ; θ ) 的输出是 d 维的向量 a ,作为动作【a直接是μ的输出,没有随机性】。
- 两种策略网络一个是随机的,一个是确定性的

actor-critic中的策略网络: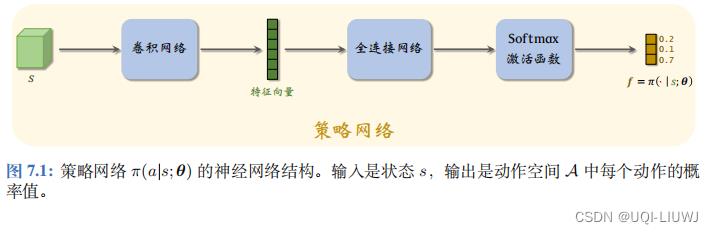
2.2 价值网络
价值网络同样是对动作价值函数 的近似,但形式上也有不同:
的近似,但形式上也有不同:
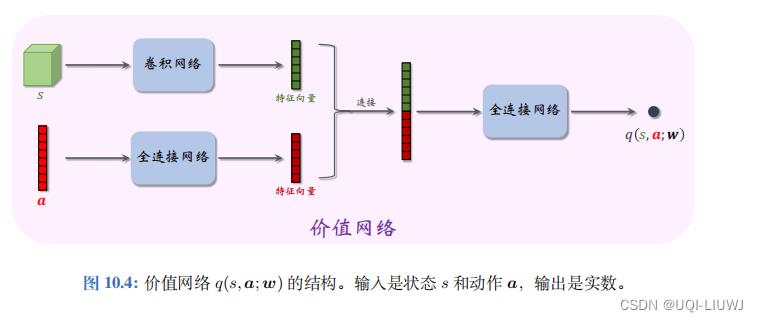
actor-critic中的价值网络:
3 算法推导
DPG可以看作一种异策略(off-policy)的方法。
我们把agent的轨迹整理成 的四元组。
的四元组。
训练的时候,随机取一组四元组,其中训练策略网络μ(s;θ)的时候,只用到状态 ;训练价值网络q(s,a;w)的时候,需要用到四元组中的所有元素
;训练价值网络q(s,a;w)的时候,需要用到四元组中的所有元素
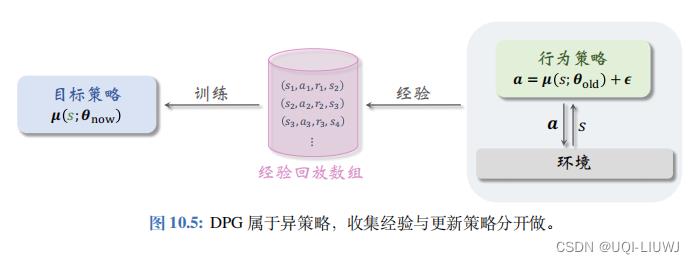
这里的ε指的是噪声
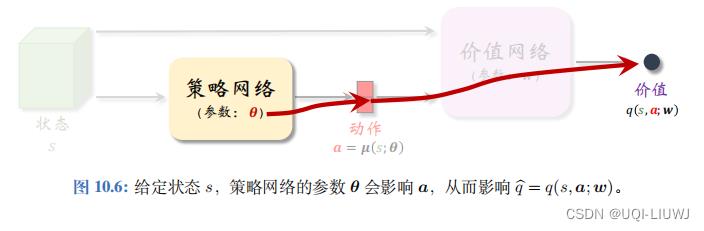
3.1 训练策略网络
- 给定状态s,策略网络会输出动作 a=μ(s;θ)
- 然后价值网络会根据s和a打一个分数q(s,a;w)
- 参数θ影响a,进而影响q
- ——>训练策略网络的目标就是改进θ,使得q最大
我们用梯度上升来增大J(θ),每一次用随机变量S的一组观测值来计算梯度
- 训练策略网络的时候,如果当前状态是s,那么策略网络会输出动作μ(s,θ)
- 那么此时价值网络的打分就是
- 我们希望打分的期望越高越好,所以此时目标函数定义为打分的期望:
- 所以此时策略网络的学习可以建模成
- 注意,这里我们只训练策略网络,所以最大化问题中的优化变量是策略网络的参数 θ ,而 价值网络的参数 w 被固定住 。




- gj是
 的无偏估计,叫做确定策略梯度(DPG deterministic policy gradient)
的无偏估计,叫做确定策略梯度(DPG deterministic policy gradient)
这里我们是
所以使用链式法则 求出gj:
求出gj:
3.2 训练价值网络
价值网络的目的是为了让q(s,a;w)的预测接近于真实价值函数
同样地,我们使用TD来训练价值网络
4 整体训练流程
记当前策略网络和价值网络的参数为 ,
,
- 1 从经验回放数组中取出一个四元组
- 2 让策略网络做预测

- 注意!!!
- 计算动作
 使用的是当前的策略网络
使用的是当前的策略网络 ,用 来更新
,用 来更新 - 而从经验回放中得到的aj则是用过时的策略网络
 算出来的,它是用来更新
算出来的,它是用来更新 - ——>诠释了DPG是一个异策略的网络
- 计算动作
- 注意!!!
- 3 让价值网络做预测(注意什么地方用aj,什么地方用)

- 4 计算TD目标和TD误差

- 5 更新价值网络 (注意什么地方用aj,什么地方用)

- 6 更新策略网络 (注意什么地方用aj,什么地方用)

以上是关于强化学习笔记:连续控制 & 确定策略梯度DPG的主要内容,如果未能解决你的问题,请参考以下文章