强化学习笔记:置信域策略优化 TRPO
Posted UQI-LIUWJ
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了强化学习笔记:置信域策略优化 TRPO相关的知识,希望对你有一定的参考价值。
- 置信域策略优化 (Trust Region Policy Optimization, TRPO) 是一种策略学习方法,跟其他策略梯度有很多相似之处。
- 跟策略梯度方法相比,TRPO 有两个优势:
- 第一,TRPO表现更稳定,收敛曲线不会剧烈波动,而且对学习率不敏感;
- 第二,TRPO 用更少的经验(即智能体收集到的状态、动作、奖励)就能达到与策略梯度方法相同的表现。
1 置信域方法
假设我们有这样的一个优化问题:
有各种各样的优化算法用于解决这个问题。几乎所有的数值算法都是做这样的迭代
不同的优化算法,其区别在于,具体怎么样利用数据来更新变量θ


置信域方法用到“置信域”这一个概念。
给定当前变量
,我们用
来表示


置信域方法则是需要构造一个函数
,这个函数需要满足:
那么集合
顾名思义,在

1.1 举例
我们用一个一元函数的例子来解释J(θ)和之间的关系:
- 上图中横轴是优化变量θ,纵轴是函数值
- 如图所示,函数
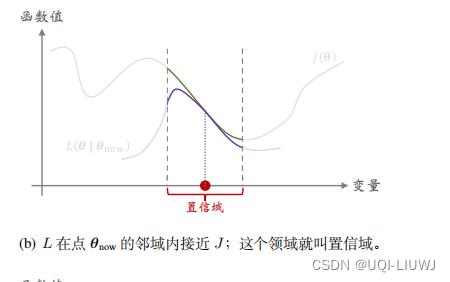
- 这个邻域
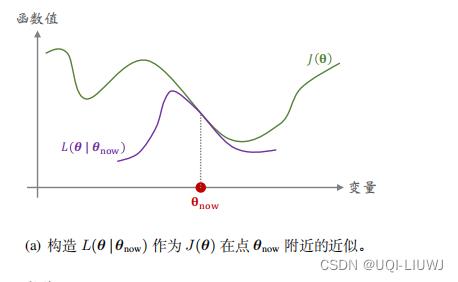
- 通常来说,J 是个很复杂的函数,我们甚至可能不知道 J 的解析表达式
- 而我们人为构造出的函数 L 相对较为简单,比如 L 是 J 的蒙特卡洛近似,或者是 J 在
- 既然可以信任 L ,那么不妨用 L 代替复杂的函数 J ,然后对 L 做最大化。这样比直接优化 J 要容易得多。 ——>这就是置信域方法 的思想。
具体来说,置信域方法做下面这两个步骤,一直重复下去,当无法让 J 的值增大的时候终止算法
- 第一步:做近似
- 给定
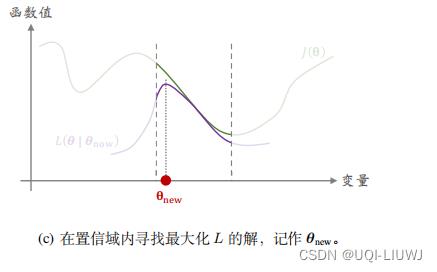
- 第二步:最大化
- 在置信域
- 我们记找到的值为

- 置信域方法其实是一类算法框架,而非一个具体的算法。
- 有很多种方式实现实现置 信域方法。
- 第一步需要做近似,而做近似的方法有多种多样,比如蒙特卡洛、二阶泰勒展开。
- 第二步需要解一个带约束的最大化问题;求解这个问题又需要单独的数值优化算法,比如梯度投影算法、拉格朗日法。
- 除此之外,置信域也有多种多样的选择
2 策略学习(复习)
对于策略网络
,我们记动作价值函数为
,他是回报的期望。
状态价值函数我们记作:
策略网络学习的目标函数是:
强化学习笔记:policy learning_UQI-LIUWJ的博客-CSDN博客中提到的REINFORCE和Actor-Critic使用不同的方法,通过蒙特卡洛近似梯度
,得到随机梯度,然后使用随机梯度上升来更新θ


3 TRPO的目标函数
我们把目标函数J(θ)变换成另一种等价形式。
我们改写一下状态价值函数:


4 TRPO 数学推导
TRPO 是 置信域方法在策略学习中的应用,所以 TRPO 也遵循置信域方法的框架——重复 做近似 和 最大化这两个步骤,直到算法收敛。 收敛指的是无法增大目标函数 J ( θ ) ,即无法增大期望回报。4.1 做近似
- 我们从定理 9.1 出发。定理把目标函数 J(θ) 写成了期望的形式。
- 我们无法直接算出期望,无法得到 J(θ) 的解析表达式;
- 原因在于只有环境知道状态S 的概率密度函数,而我们不知道。
- 我们可以对期望做蒙特卡洛近似,从而把函数 J 近 似成函数 L 。
-
用策略网络
 控制智能体和环境的交互,从头到尾玩一局游戏,观测到一条轨迹:
控制智能体和环境的交互,从头到尾玩一局游戏,观测到一条轨迹:
-

-
此时的动作at都是根据策略网络
 抽取得到的样本
抽取得到的样本
-
-
所以
 是对定理9.1 中期望的无偏估计
是对定理9.1 中期望的无偏估计
-
我们观测到了n组状态和动作,于是我们记得到的均值为:

-
这个均值L也是无偏估计,可以作为目标函数J的蒙特卡洛近似
-
但我们此时还是不知道动作价值

-
我们可以将其近似成观测到的折扣回报ut

-
-
用ut代替
,于是此时9.6式变成了:
(我们是求使得L最大的θ,所以有没有前面的1/n都无所谓)
4.2 最大化
- 在4.1中,我们用
来近似目标函数J(θ)
- 我们现在需要做的就是求解θ,使之满足:

- 下一个问题就是,该使用什么样的置信域呢?
-
一种方法是用以
为球心、以
∆
为半径的球作为置信域。
- 这样的话,公式9.8就变成了:
-

-
另一种方法是用
KL
散度衡量两个概率质量函数
 和
和 的距离
的距离
- 两个概率质量函数区别越大,它们的 KL 散度就越大。
- 反之,如果 θ 很接近,那他们的KL散度就会很接近
- 这样的话,公式9.8就变成

- 用球作为置信域的好处是置信域是简单的形状,求解最大化问题比较容易,但是用球做 置信域的实际效果不如用 KL 散度。
-
一种方法是用以
- but,9.9 或9.10的求解其实并不容易。。。。
5 流程总结
TRPO 需要重复 做 近似 和 最大化 这两个步骤: 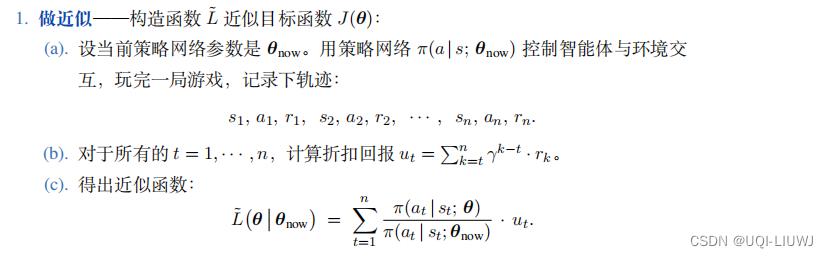

但往往第二步实现起来很麻烦。。。
还有一个和策略网络不同的地方是:策略网络用蒙特卡洛近似的是 ,TRPO用蒙特卡洛近似的直接是J(θ)
,TRPO用蒙特卡洛近似的直接是J(θ)
5.1 TRPO的超参数
相比于一般的策略网络,TRPO需要调的超参数会多一个:除了梯度上升过程需要调的学习率之外,置信域的半径Δ也是需要手动调整的
通常来说,Δ在算法运行过程中要逐渐缩小。
不过,虽然TRPO需要调参,但是它对超参数的设置不敏感(也就是说,即使超参数设置得不够好,TRPO的表现也不会太差)【相比而言,策略梯度算法对于超参数则更加敏感】
以上是关于强化学习笔记:置信域策略优化 TRPO的主要内容,如果未能解决你的问题,请参考以下文章