基于ARM+FPGA低成本高实时Ethercat运动控制器解决方案
Posted 信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于ARM+FPGA低成本高实时Ethercat运动控制器解决方案相关的知识,希望对你有一定的参考价值。
运动控制器作为数控系统的核心部件,在高端机器人、数控机床、工业自动化等领 域得到了广泛的应用。 本文以实际工程应用为背景,以研制高效、高可靠性、功能丰富的运动控制器为目标,对运动控制器及运动控制算法进行了研究与分析,对于实现高速、高效、高精度的 运动控制具有重要的理论意义和实际应用价值。 基于 ARM+FPGA 的硬件架构,提出了硬件设计的总体方案。设计了运动控制器的 硬件电路及主控制板和扩展板,搭建了三维运动控制平台。 提出了运动控制器软件设计的总体方案,基于 MODBUS 协议,设计了串口通信程 序;设计了动态链表,将上位机(触摸屏)的运动控制信息,存储到外部的 EEPROM , 为实际操作提供了方便。基于 Verilog HDL 硬件描述语言设计了 ARM 与 FPGA 的通信 模块和加减速模块;设计了 HMI 控制界面,实现了人机交互。 分析了传统逐点比较法平面直线和圆弧插补的基本原理及实现过程,并利用 MATLAB 进行了仿真验证。研究了改进后的逐点比较法平面直线和圆弧的插补,通过 仿真对比可知,改进后的插补算法具有更高的插补效率;研究了利用逐点比较法实现空 间直线插补的具体步骤。对一种空间圆弧插补算法进行了分析,仿真结果表明,该算法 使得插补点均位于圆弧上,不存在累积误差。 阐述了梯形以及 S 曲线加减速算法的实现过程,在分析步进电机矩频特性和加减速 特性的基础上,对步进电机加减速曲线的离散方法及速度数据表的建立方法进行了研究。 最后,对运动控制器的性能及算法进行了测试,结果表明,本文设计开发的运动控 制器功能和性能良好。该运动控制器已经应用于点胶机等自动化设备的控制领域,具备 良好的应用前景。 目前,以嵌入式处理器为基础开发的数控系统主流架构形式有如下几种 [38,39] : ( 1 ) ARM+DSP 的架构:通过 DSP 的强大浮点计算能力来分担 ARM 数据处理的 任务,系统实时性得到了保证,但是对电机数以及开关量数量的控制有限。 (2) ARM +FPGA/CPLD 的架构:这种形式接口处理能力得到了有效的扩展,但是 插补算法及其他运算都由 ARM 来承担,如果 ARM 数据计算能力不足,控制系统的精 度和实时性都会受到影响。 (3) ARM +DSP+FPGA/CPLD 的架构:这种形式能充分利用 ARM 的数据处理能 力和 DSP 以及 FPGA 实时计算、接口处理能力,但是结构复杂,不利于维护和开发。 通过以上分析,考虑到系统实时性要求、数据处理要求和实际应用的需要,本课题 研究的运动控制器硬件系统采用 ARM+FPGA 的架构形式。采用 ARM 为主控制芯片, 主要完成插补算法、人机交互、数据存储等控制,辅助芯片 FPGA 则完成各轴脉冲并行 输出、输出控制(如通过继电器控制开关动作)、加减速控制、原点位置的检测、通讯 模块的处理,差分输入信号的处理等功能,运动控制器的结构框图如 2-1 所示。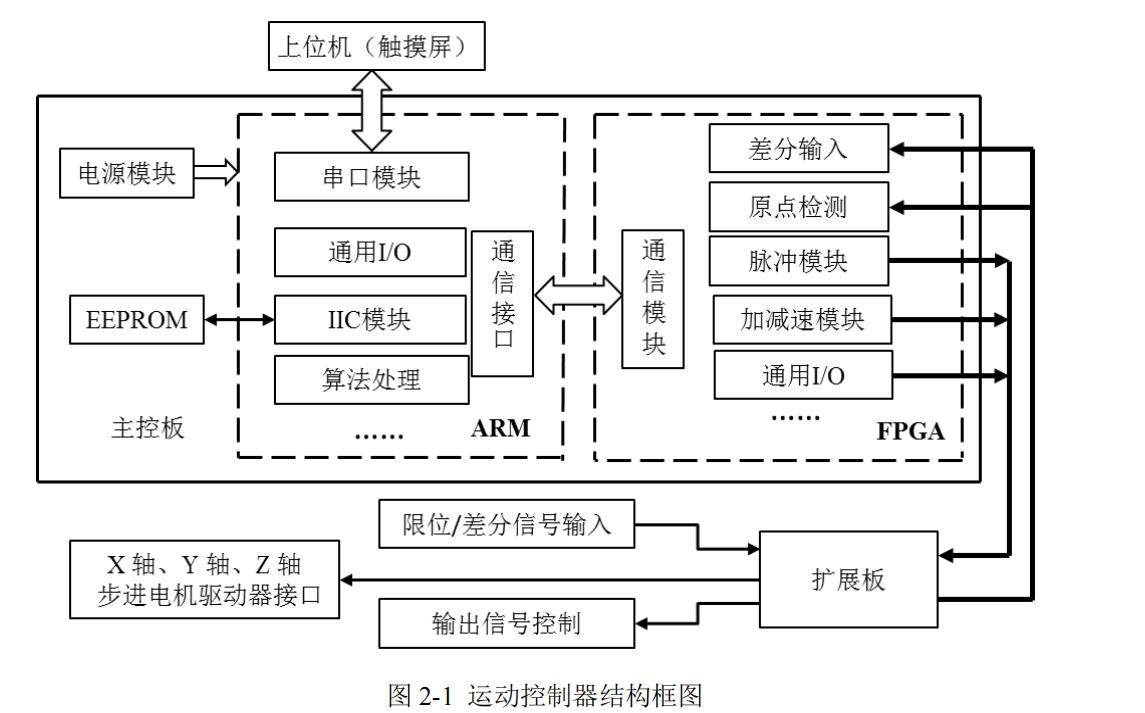 考虑到控制系统的实时性和灵活性的要求,选用
ST
公司生产的
STM32F407
为主控
芯片。
对于
FPGA
芯片的选择,首先得考虑到引脚资源以及接口电平是否和
STM32F407
相匹配,同时平台开发的成本、手册资料是否齐备等问题也是需要考虑的重要部分。综
合多项因素,本文所述运动控制器选用的
FPGA
芯片为
Altera
公司的
EP2C8Q208C8N。
考虑到控制系统的实时性和灵活性的要求,选用
ST
公司生产的
STM32F407
为主控
芯片。
对于
FPGA
芯片的选择,首先得考虑到引脚资源以及接口电平是否和
STM32F407
相匹配,同时平台开发的成本、手册资料是否齐备等问题也是需要考虑的重要部分。综
合多项因素,本文所述运动控制器选用的
FPGA
芯片为
Altera
公司的
EP2C8Q208C8N。
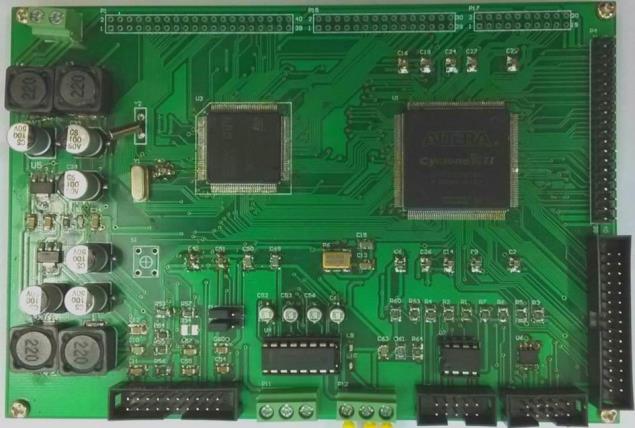 2-15
主控板实物图
2-15
主控板实物图


Ethercat部分待补充。
欢迎技术交流,获取更多资源。v: 13670212541
以上是关于基于ARM+FPGA低成本高实时Ethercat运动控制器解决方案的主要内容,如果未能解决你的问题,请参考以下文章
ethercat主站 FPGA AM5728高实时带加密实现32轴