OAK-D深度AI相机双目测距原理详解
Posted OAK中国
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了OAK-D深度AI相机双目测距原理详解相关的知识,希望对你有一定的参考价值。
本文首发于oakchina.cn
OAK五点双目测距示例
目前视觉测距主要有被动双目深度测距、TOF光测距、结构光测距等方式。OAK-D这种类人眼的被动双目测距方式测量,测量精度不如TOF和结构光的主动光方式,但是也有其优点。它不像TOF和结构光基本上只能在室内使用,它能够在室内室外直接使用;不用像TOF和结构光需要在相机上加装特殊的发射器和接收器,长期连续开机的使用寿命更长,硬件成本更低。
OAK-D芯片内置了双目深度计算功能,有些小伙伴在使用OAK-D做双目测量的时候,会觉得OAK-D的深度图不够好看,深度测量量程或者精度不够高。以下内容是对OAK-D的深度测距部分的优化设置,希望可以帮到大家。
首先是和深度测量精度比较有关的几个设置参数:
1、Left-Right Check
设置为(True)时,软件会检查左右眼一些物体边界因为遮挡产生的错误视差像素,删除错误像素,不参与深度计算,让深度计算更精确。

2、Extended disparity mode
设置为(True)时适合更近距离的深度测距最小测量距离可以到35cm左右。
min_distance = focal_length_in_pixels * baseline / disparity_in_pixels = 882.5 * 7.5cm / 190 = 34.84cm
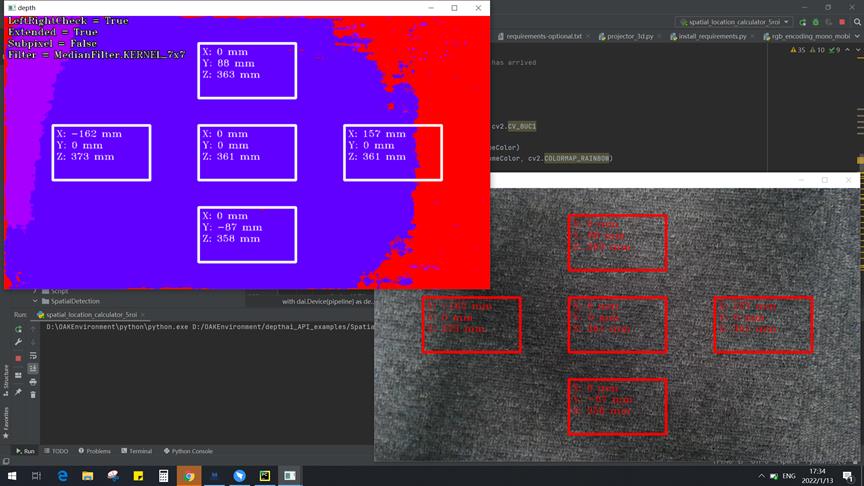
3、Subpixel mode
设置为(True)时适合更远距离的深度测量,通过深度图软件差值,提高像素测量精度。OAK-D设置后的最远测量距离为Dm = (7.5/2) * tan((90 – 71.9/1280)*pi/180) = 3825.03cm = 38.25 meters
注意:在做ROI区域内远距离测量时需要同时关闭depthai.SpatialLocationCalculatorConfigThresholds中upperThreshold的门限。这样才能让测量距离最大。

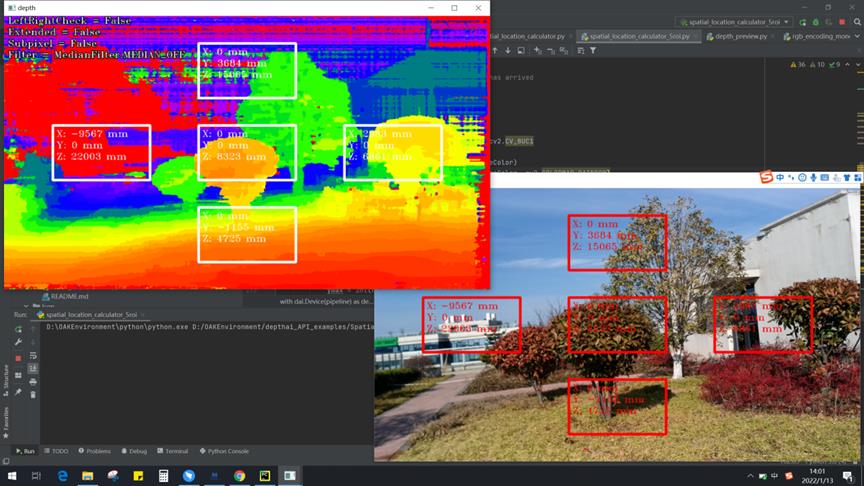
为了让测量的深度图更加平滑,OAK-D深度图中还内置了各种不同效果的滤波器。
下图是关闭MedianFilter滤波器的效果。
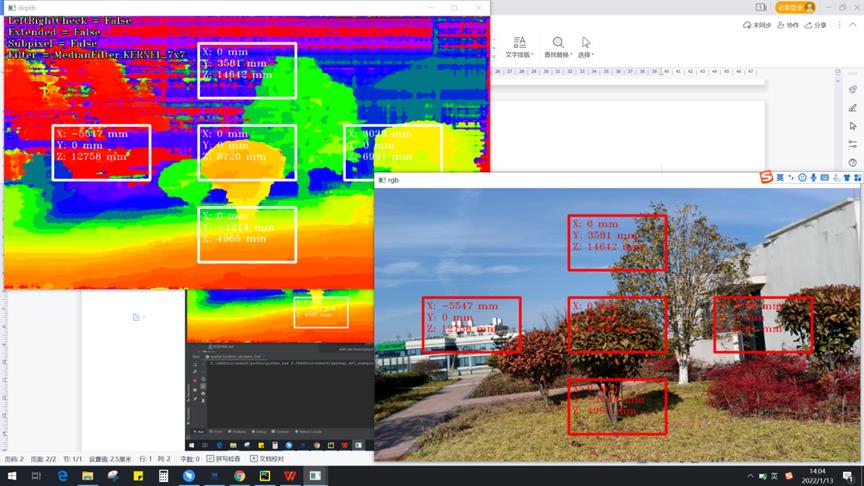
下图是打开MedianFilter滤波器滑窗设置为7*7的效果。可以看见,深度图的物体边缘更加平滑。更多滤波器效果大家可以自行设置。
我们还可以设置深度图帧率,以下是各种模式下的FPS值。
| Stereo depth mode | FPS for 720P |
|---|---|
| Standard mode | 150 |
| Left-Right Check | 60 |
| Subpixel Disparity | 30 |
| Extended Disparity | 60 |
| Subpixel + LR check | 15 |
| Extended + LR check | 30 |
OAK-D的双目测量深度效果,可以在我们的优化下达到一个更好的效果。2022年OAK也会迎来其双目加结构光和双目加TOF的混合测距方式,给大家提供更多选择。
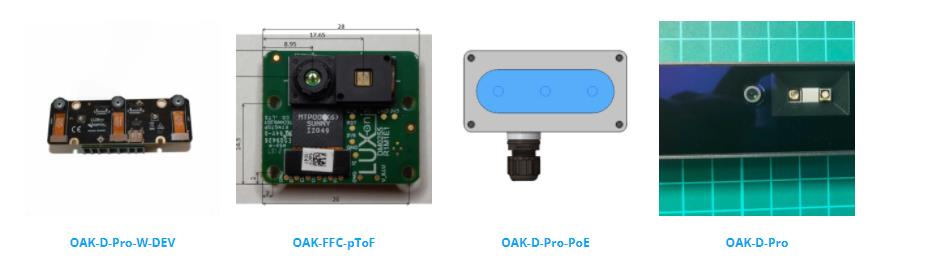
OAK-D-Pro-W-DEV
OAK-FFC-pToF
OAK-D-Pro-PoE
OAK-D-Pro
最新上市时间请及时关注我们的各个平台
OAK中国 | 追踪AI技术和产品新动态
公众号 | OAK视觉人工智能开发
戳「+关注」获取最新资讯↗↗
如果喜欢,请分享or点赞吧~比心❤
以上是关于OAK-D深度AI相机双目测距原理详解的主要内容,如果未能解决你的问题,请参考以下文章
双目三维重建系统(双目标定+立体校正+双目测距+点云显示)Python