施耐德canopen通讯
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了施耐德canopen通讯相关的知识,希望对你有一定的参考价值。
我施耐德的plc,用canopen和控制变频器,PDO映射的方式,但我如何才能判断总线断线的情况。比如变频死机或者通讯线断开的情况。软件配置里面有心跳设置但不知道怎么用,问了下施耐德技术热线,那边也没说上来,说可能不可以。另外看canopen协议里面心跳报文是不是要有一个类似功能块来读取?望那位兄弟给解答下
断线的话,就是用心跳机制来判断啊。
超过一定时间没有收到心跳包,就认为断线了。
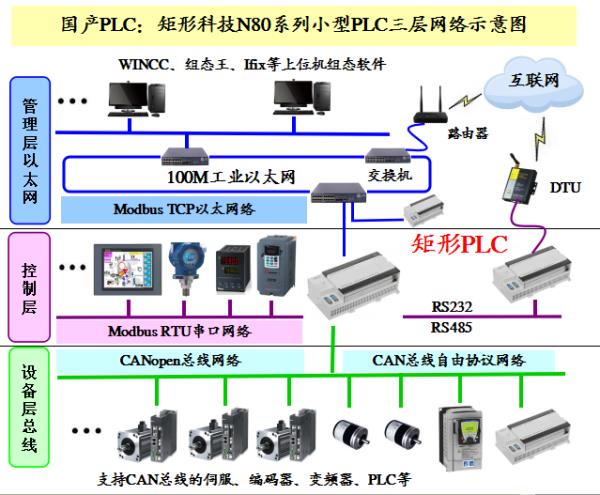
国产矩形PLC,支持Modbus tcp、Modbus RTU、自由串口通讯,还支持CANopen协议的编码器、伺服、变频器等设备连接。
梯形图编程也比较简单,可以提供详细的方案和PLC梯形图程序。
1、PDO映射处 把发射和接受的6th勾上
2、canopen I/O映射处 用自己的全局变量跟变频器的状态映射处绑定
3、然后就好啦 变频器是过载还是通讯断就都可以通过自己定义的全局变量反映出来了追问
默认的配置里面变频状态字已经映射了,可以监控变频的状态我能明白,但假如通讯线断开了怎么办,状态字看不出来吧
追答通讯断了 变频器就会报警 错误代码应该有吧 我没试过 (比如:过载的代码不可能和缺相的代码一样吧)
追问我说的是硬件的线断掉
比如MODBUS可以用超时来判断,但pdo好像是不是这种机制吧
怎么用代码实现canopen的301规范
参考技术A 1、CANopen简介1.1.CANopen定义了应用协议,应用层,通讯协议三部分
1.2.CANopen源代码整体架构
其中,CANopen的基本知识就不做详细介绍,如需要了解,关注公众号"虹科CANopen与EtherCAT知识平台“。
CAN driver layer:主要是CAN底层驱动相关的,不同硬件平台的CAN驱动也不一样,这里使用的是CAN driver for STM32F bxCAN-Controller
CANopen stack layer:这里是CANopen的具体实现
CCM layer:这里时由c写好的一些API函数,是中间调用层,实现各类报文和参数保存等功能。
需要注意的是一些功能的实现,需要自己添加程序,比如对1010和1011保存和恢复默认参数这部分,需要自己写程序。是保存那部分参数?保存在Flash还是eeprom中?需要自己选择等
2、CANopen移植流程
一个CNAopen的应用程序一般都遵循下列流程图,
2.1、初始化硬件
2.2、创建数据结构(对象字典、结构体、变量、实例)等
2.3、初始化一些服务,包括通讯参数,穿件通讯对象
2.4、在程序中,处理CANopen协议中的内容
2.5、必要时关闭CANopen layer
注意:在进图主函数之前,程序会先进行初始化设置,比如对系统时钟的设置。本教程使用的系统时钟是168M,外部晶振是8M,PLL作为时钟源。这部分的配置主要跟F407系统时钟配置相关,这里就不详细说明。
CANopen源代码移植
2.1、初始化硬件
进入主函数后,
串口初始化:对串口进行初始化设置。当程序运行是,出现错误时,CANopen 层会调用一些标准函数,通过串口输出错误的一些说明,错误代码,方便调试错误,比如错误代码0x0013,查看错误代码表,发现是CAN初始化错误,这时候就需要检查CAN的初始化,经检查确认是CAN的Rx和Tx在程序移植时对应的引脚不同。这样减少了移植差错时间。比如0x0078,这时候就要检查PDO映射和对象字典了。
时钟初始化:F407配置407的滴答定时器为1ms产生一次中断
CAN设置:选择单CAN或者多CAN,对Rx和Tx相关引脚进行设置
2.2、CANopen Layer初始化
CcmInitCANopen这个函数初始化CANopen layer,创建数据结构,当执行完该函数时,对象字典创建成功,默认值被些人相关的索引条目中。但是对象字典的索引条目还没连接到应用程序中,也就是调用这些索引数据这部分程序还没完成。此时,NMT保持在初始化状态。
设置节点ID为0x41,波特率为125k
需要注意:
把参数分装在结构体tCcmInitParam中,需要注意的是这里的结构体中的成员是固定不变的,所以保存在ROM中,如果需要改变节点地址或者需要通过DIP改变节点,那么该结构体必须保存在RAM中
2.3、CANopen Layer初始化后,开始进入NMT状态机的切换。执行CcmConnectToNet()这个函数,从初始转态中切换到预操作状态。
这一部分中,当不同的xxxNMTEvent发生时,都要调用AppCbNmtEvent这个回调函数,比如上电状态初始化,应用层复位(0x2000-0x5FFF和0x6000-0x9FFF),通讯参数复位(0x1000-0x1FFF)
注意:当使用LSS这个功能时,在进入NMT状态机的切换前,应该先执行LSS状态机。根据CiA DS-305协议,CcmProcessLssInitState 的返回值如果为0xFF,就标志无效的节点,因此一直执行循环,知道该返回值不为0xFF。当然,不需要LSS的话,这部分可以不要。
2.4、进入操作状态,有两种方法:一是设备接收到进入操作状态的报文(0x00, kNmtCommStartRemoteNode). 后者调用了CcmBootNetwork
在主函数里面模拟数字量输入,Ccmprocess()是CANopen协议的处理函数,包括 PDO module,LSS module,NMT master module,NMT slave module,EMCP module,HBC module,HBP module,SDOS module,SDOC module等等。本回答被提问者采纳
以上是关于施耐德canopen通讯的主要内容,如果未能解决你的问题,请参考以下文章