Jetson TX2使用cv2调用板载摄像头
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Jetson TX2使用cv2调用板载摄像头相关的知识,希望对你有一定的参考价值。
参考技术A 在TX2上使用cv2.VideoCapture(0)是 无法打开板载摄像头 的!
如果插入额外的usb摄像头,使用cv2.VideoCapture(1)就可以轻松打开usb摄像头。
而对于板载摄像头的调用,需要设置一些列参数,如下:
用gst_str代替摄像头编号0就可以了,我的TX2使用的是\'nvarguscamerasrc\'的设置,其中flip-method用于改变画面方向
https://gist.github.com/jkjung-avt/86b60a7723b97da19f7bfa3cb7d2690e
在Jetson TX2上捕获显示摄像头视频
参考文章:How to Capture and Display Camera Video with Python on Jetson TX2
与参考文章大部分都是相似的,如果不习惯看英文,可以看看我下面的描述
在Jetson TX2捕获和显示摄像头视频,包括IP CAM(网络摄像头)、USB webcam和板载摄像头。代码应该也适用于Jetson TX1
先决条件
带有GStreamer和python支持的OpenCV构建并安装在Jetson TX2,我使用的是OpenCV-3.4.0和python3。关于如何在Jetson TX2上安装OpenCV(3.4.0)参考下面文章:在Jetson TX2上安装OpenCV(3.4.0)
如果你想用IP CAM进行测试,需要设置它并知道它的RTSP URI。例如:RTSP://admin:XXXXX@192.168.1.64:554。
插入一个USB摄像头,通常是/dev/video1,板载摄像头使用的是/dev/video0
安装包含h264parse元素的gstreamer1.0-plugin -bad-xxx。这是解码来自IP CAM的H.264 RTSP流所必需的。
sudo apt-get install gstreamer1.0-plugins-bad-faad gstreamer1.0-plugins-bad-videoparsers
代码下载与使用
下载代码:tegra-cam.py 地址:https://gist.github.com/jkjung-avt/86b60a7723b97da19f7bfa3cb7d2690e
使用USB摄像头,分辨率设为1280x720。‘–vid 1‘ 意味着 /de/video1
python3 tegra-cam.py --usb --vid 1 --width 1280 --height 720
我的环境下运行出错!
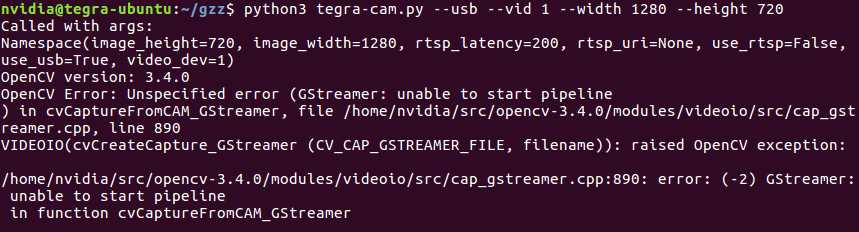
原因可能是我的GStreamer的v4l2src对USB摄像头不起作用,使用下面的代码去代替open_cam_usb()
def open_cam_usb(dev, width, height): return cv2.VideoCapture(dev)
使用板载摄像头
python3 tegra-cam.py
使用IP CAM,同时替换成你自己的IP
python3 tegra-cam.py --rtsp --uri rtsp://admin:XXXXXX@192.168.1.64:554
这个tegra-cam.py脚本关键在于调用了 cv2.VideoCapture()的GStreamer管道。根据经验,使用 nvvidconv 进行图像缩放并将颜色格式转换为BGRx可以在帧率产生更好的效果
def open_cam_rtsp(uri, width, height, latency): gst_str = (‘rtspsrc location= latency= ! ‘ ‘rtph264depay ! h264parse ! omxh264dec ! ‘ ‘nvvidconv ! ‘ ‘video/x-raw, width=(int), height=(int), ‘ ‘format=(string)BGRx ! ‘ ‘videoconvert ! appsink‘).format(uri, latency, width, height) return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER) #def open_cam_usb(dev, width, height): # # We want to set width and height here, otherwise we could just do: # # return cv2.VideoCapture(dev) # gst_str = (‘v4l2src device=/dev/video ! ‘ # ‘video/x-raw, width=(int), height=(int) ! ‘ # ‘videoconvert ! appsink‘).format(dev, width, height) # return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER) def open_cam_usb(dev, width, height): return cv2.VideoCapture(dev) def open_cam_onboard(width, height): # On versions of L4T prior to 28.1, add ‘flip-method=2‘ into gst_str gst_str = (‘nvcamerasrc ! ‘ ‘video/x-raw(memory:NVMM), ‘ ‘width=(int)2592, height=(int)1458, ‘ ‘format=(string)I420, framerate=(fraction)30/1 ! ‘ ‘nvvidconv ! ‘ ‘video/x-raw, width=(int), height=(int), ‘ ‘format=(string)BGRx ! ‘ ‘videoconvert ! appsink‘).format(width, height) return cv2.VideoCapture(gst_str, cv2.CAP_GSTREAMER)
以上是关于Jetson TX2使用cv2调用板载摄像头的主要内容,如果未能解决你的问题,请参考以下文章