ROS小车打造--Jetson TX2安装与调试
Posted leoFY123
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS小车打造--Jetson TX2安装与调试相关的知识,希望对你有一定的参考价值。
我拿到板子之后,要做小车的打造,需要了解板子有那些硬件资源与软件资源.然后看那一些可以利用起来,具体可参见以下文档
jetson_tx2_developer_kit_user_guide.pdf-制造文档类资源-CSDN下载
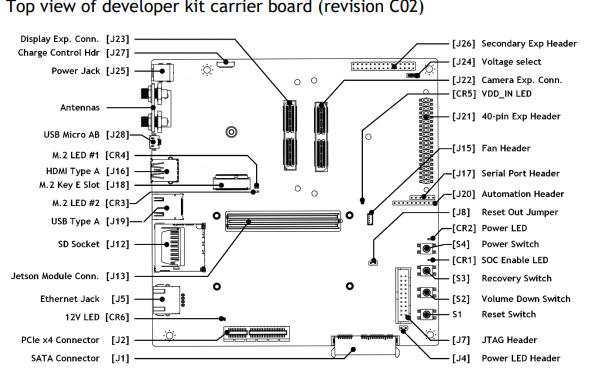
板子的硬件资源:
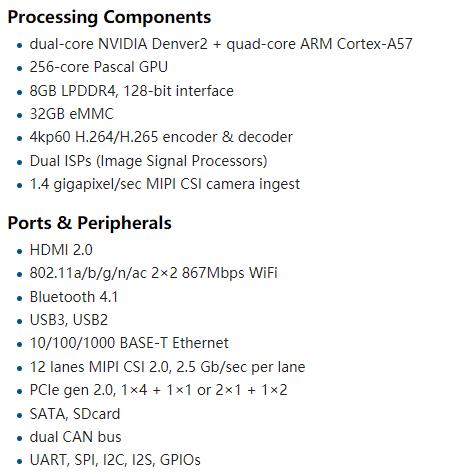
我的带一个板载摄像头插在J21上,带一个USB,一个小的micro USB,还有相关的硬件接口,日后补充
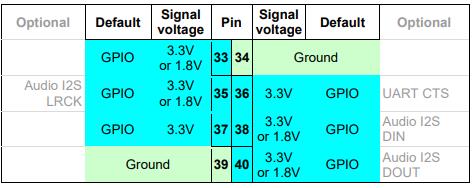
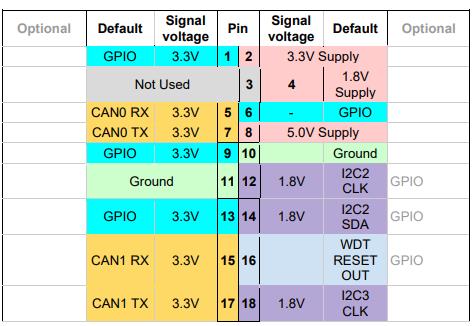
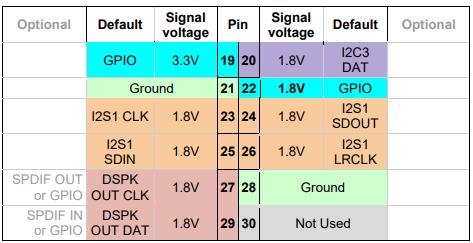
J21引脚定义

板子的软件资源:
JetPack:相当于一个一体化的软件包,帮助我们直接完成对一些模型和开发工具的安装,其中包含Linux驱动包,CUDA加速库以及深度学习和计算机视觉的函数接口。
TensorRT:是一个高性能的深度学习推理(Inference)优化器,可以为深度学习应用提供低延迟、高吞吐率的部署推理。TensorRT可用于对超大规模数据中心、嵌入式平台或自动驾驶平台进行推理加速
TensorFlow:是广泛使用的实现机器学习以及其它涉及大量数学运算的算法库之一
cuDNN:深度神经网络加速库,让开发人员专注于设计和实现神经网络模型,而不是调整性能,同时还可以在GPU上实现高性能现代并行计算。
CUDA:通用并行计算架构,该架构使GPU能够解决复杂的计算问题
Multimedia_API:主要是应用于摄像头与图相应用的传感器的开发应用
VisionWorks:是基于openvx的,OpenVx是一个接口标准,为了嵌入式处理器加速而生的。Visionworks可以理解为Openvx在cuda上的一个加速包, 对于速度要求不高的,可以不用考虑这个平台,直接使用opencv开发效率更高
OpenCV:是一个跨平台的计算机视觉和机器学习的软件库,在物体识别、运动跟踪中广泛应用。
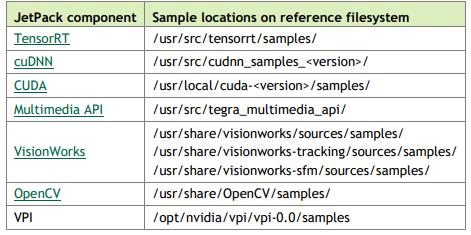
一些例程的目录如下所示
板子的一些工具的安装与使用
1.使用板载摄像头
nvgstcapture使用ctrl+C关闭
2.查看CPU温度
sudo apt install lm-sensors -y
sensors
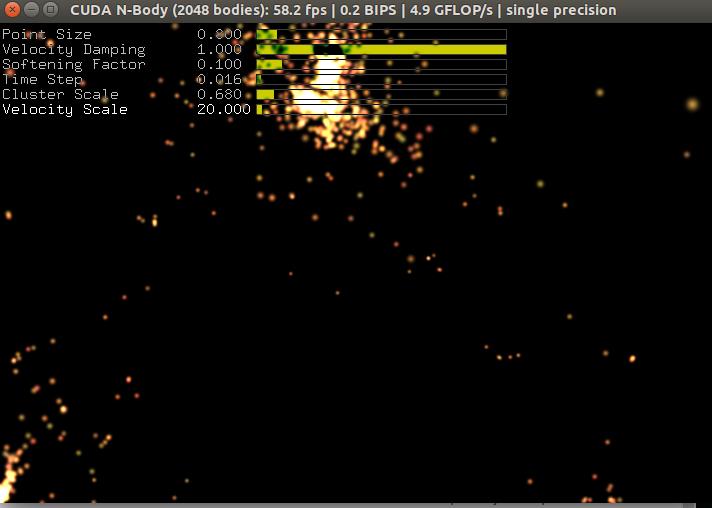
3.run cuda samples
cd /usr/local/cuda-10.2/samples/5_Simulations/
ls
cd nbody
sudo make
./nbody
4.使用moba xterm连接设备
5.安装cutecom
sudo apt-get install cutecom6.安装QT
sudo apt-get install qt5-default qtcreator -yYolov-1-TX2上用YOLOv3训练自己数据集的流程(VOC2007-TX2-GPU)_天明宇朗的博客-CSDN博客_yolov3训练voc2007
以上是关于ROS小车打造--Jetson TX2安装与调试的主要内容,如果未能解决你的问题,请参考以下文章