机电一体化毕业论文写某产品虚拟样机方面的,可以吗?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机电一体化毕业论文写某产品虚拟样机方面的,可以吗?相关的知识,希望对你有一定的参考价值。
针对挖掘机高效、节能和智能化的发展趋势,结合我国传统挖掘机行业新产品开发周期长、成本高、对挖掘机产品的评价和设计手段落后等现状,,首
次运用虚拟样机这一近年来得到快速发展的先进技术开展挖掘机的高效、节能和智能控制技术的研究。重点研究开发一个集成多领域系统模型的挖掘机虚拟样机环
境,作为挖掘机综合性能仿真评估平台,用于挖掘机节能和智能化策略的分析及优化,提高挖掘机的作业效率、节能效果和自动化水平。主要研究内容和特色如下:
1、针对挖掘机器人机、电、液和信息一体化的发展特点,提出挖掘机器人虚拟样机的建模策略和框架。根据抽象建模的需要将挖掘机器人分为有机关联的单学科系
统级模型,即:动力学、机械、液压和控制四个子系统模型,为了得到一个综合的性能仿真平台,提出动力学、机械、液压、控制一体化建模技术。基于各个子系统
的功能确定系统之间的参数传递关系,通过子系统模型的参数关联集成,以及数据接口设置,将各个子系统模型在ADAMS环境中实现集成,构成挖掘机器人的虚
拟性能测试平台,以能够在此平台上对挖掘机器人的动力学、液压、控制系统进行仿真分析。
2、分别利用D-H方法和Newton-Euler方法推导了挖掘机器人运动学和动力学理论模型,在此基础上利用动力学分析软件ADAMS建立挖掘机器人
的参数化机构仿真模型,利用三维造型软件Pro/E建立了挖掘机器人的机械部件模型并与ADAMS参数化机构模型进行集成,构成机械系统模型,在此模型上
可以进行运动学和动力学可视化仿真分析。
3、针对现有挖掘机液压系统模型中液压缸子模型未能考虑因挖掘机不同位姿变化带来的质量分布以及外负载参数的变化,从而造成液压系统仿真模型误差较大的问
题,提出了基于虚拟样机动力学解算的液压系统仿真模型的建模方法。由此得到的液压系统模型由于关联了系统动力学响应及外负载的变化,液压系统的状态参量与
机构动作同步变化,可以更加真实精确地模拟挖掘机的工作状态。在此基础上建立了挖掘机器人节能控制和伺服控制系统模型,并在ADAMS中实现与液压系统模
型的参数关联集成。
4、对数字化虚拟样机的精确性进行了研究和评估。针对挖掘机器人虚拟样机模型系统的复杂性,提出了定性分析和定量验证相结合的方法。定性分析主要是看仿真
结果是否明显与基本物理定律矛盾,或与边界条件约束冲突。在定性分析的基础上进行定量验证,通过对模型中机构尺寸和约束进行验证保证了机构动力学模型的精
确性。在此基础上验证液压系统和控制系统模型的精确性,分空载和加载两种工况分别设计单关节动作试验方案,在保证模型与实际系统初始运动姿态以及输入信号
相同的条件下,测量关节运动位移。 参考技术A 机电一体化的论文,开始我也不会,也是师兄给的莫’文网,没几天就OK了呵呵
室温离子液体的合成及其在有机电化学中的应用
基于软刻印技术的微透镜阵列制作
数字微镜装置的光机电控制系统
面向机电产品的工业设计知识管理系统研究与实现
低速磁浮列车曲线通过机电联合导向
有机电致发光器件黑斑的自动检测系统设计
机电产品的可再制造性评价研究
有机电致发光器件薄膜封装
基于无线传感器网络的机电监测系统的应用研究
机电行业ERP中人力资源管理子系统的研究与开发
机电液一体化小型自动生产线的研制
直流电机计算机控制综合平台驱动模块及控制软件设计
动载体上机电系统拖动控制及信息交换技术
电流变传动系统动力学模型与控制方法研究
基于嵌入式Linux平台的绣花机电控系统软件的设计
客运专线站级BAS子系统设计
基于永磁无刷直流电机电动车控制器的设计与实现本回答被提问者采纳 参考技术B 机电一体化中的电机控制的探讨
思考机电一体化中的电机控制与保护
机电一体化发展趋势探究
SFC的结构化特性及其在机电一体化实践教学中的应用
浅谈机电一体化应用技术
浅析机电一体化在科技馆的应用与发展
试述机电一体化系统设计原理
机电一体化的基础实用技术简介
机电一体化技术在康复医学上的应用研究
机电一体化人才培养模式的探讨
世界汽车机电一体化的发展特点
浅谈机电一体化课程的教法
机电一体化技术在机械制造工程方面的发展方向
舰船机电一体化装备故障诊断技术研究
机电一体化技术在S—1800连晒机上的应用
随着科技的发展,现在的机电一体化产品已经涉及到机械、电气和控制等众多领域,所以单领域、独立的设计方法已不能满足综合设计的需求。为此将虚拟原型技术引入机电一体化产品设计中,形成一种基于SolidWorks&LabVIEW的虚拟原型机电一体化设计技术。本文具体研究了基于SolidWorks&LabVIEW的虚拟原型机电一体化设计技术,首先利用NI的SoftMotion模块将SolidWorks和LabVIEW紧密结合,构建基于SolidWorks-LabVIEW的机电一体化综合仿真设计环境。其次,研究了机电一体化虚拟原型的建模方法,具体包括机械建模、电气建模和控制建模三个部分。
此外以Elecworks-SolidWorks联合设计的基本方法为例简单研究了分块设计的方法。再次,研究了基于机电一体化虚拟原型的仿真设计方法,包括机械、电气和控制等领域的仿真设计,在此基础上研究了综合仿真设计。最后,研究了从虚拟原型向现实环境过渡的方法,利ICompactRIO平台对虚拟原型进行快速部署,进而可以直接指导产品的生产制造。
通过实例表明,基于虚拟原型的机电一体化产品设计方法能有效解决传统机电一体化产品设计遇到的问题,大大缩短产品的研制周期,为机电一体化产品设计方法提供了全新的技术途径。
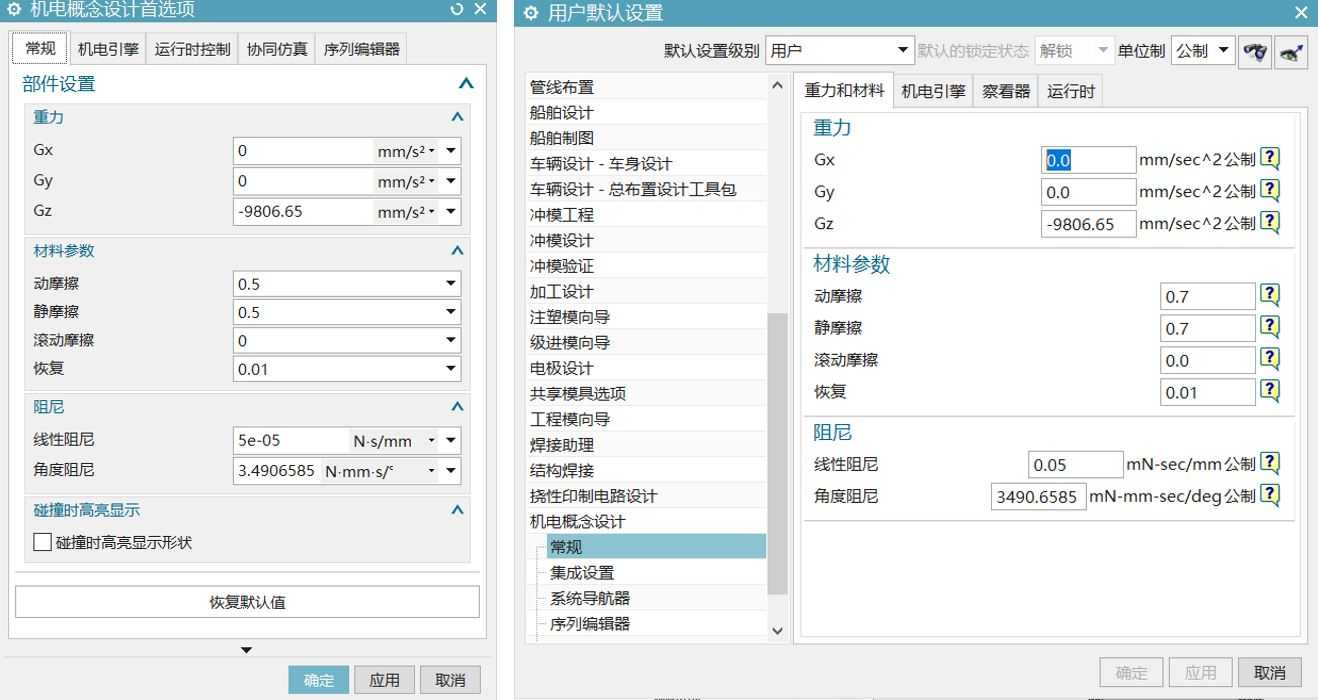
MCD 机电一体化概念设计首选项
机电一体化概念设计首选项(机电概念首选项)可以更改默认的系统参数并将其应用到工作部件中,可以灵活地在工作部件中设置不同于用户默认设置的系统参数。在机电概念首选项中可以执行以下操作:
1 设置重力、摩擦和阻尼属性。
2 调整物理引擎。
3 设置仿真刷新频率。
4 更改仿真显示速度。
5 设置联合仿真主机和时序设置。
通常可以从两个地方对MCD的默认系统参数进行设置:用户默认设置(下图右)和机电概念首选项(下图左)。两者的区别在于:用户默认设置用于全局默认参数的设置,设置后需要重启NX才能生效。机电概念首选项设置的参数存储在工作部件中,只对当前工作部件有效,机电概念首选项设置的参数将会覆盖用户默认设置的参数。
各参数具体含义如下:
|
常规选项 |
|
|
重力 |
指定重力在全局坐标系中的 X, Y, Z 分量。 |
|
材料参数 |
指定材料的碰撞参数,包括动摩擦/动摩擦/滑动摩擦系数,以及恢复系数。 |
|
阻尼 |
指定线性或角度阻尼值,以降低振动幅度。 |
|
碰撞高亮 |
当碰撞体接触相似的碰撞体时,高亮显示模型中的碰撞体。 |
|
机电引擎选项 |
|
|
运行时参数 |
设置以下默认的运行时参数: 碰撞精度—设置碰撞检测的精度。当两个碰撞体距离小于等于该值,可以认为两个对象发生了碰撞。距离达到该值时物体可以相互穿透。较大的值更有效,但会导致更大的穿透率。 分布时间—设置最小时间增量。每个时间步长进行一次物理计算。动作不会在时间步长之内发生。较大的值会提高系统性能,但会降低准确性。 注意:步长过大可能会导致模拟不稳定,约束中断,物体获得无限能量。如果出现不稳定性,可以减小步长,使步长的倒数比系统中最快振荡的频率大10倍。默认步长为1毫秒,振荡频率低于100赫兹。 弹力乘数—指定在仿真过程中鼠标拖动对象时施加的力。 |
|
物理引擎调整 |
指定物理引擎的默认值。 公差—设置关节允许变动量,该距离仍被视为关节对齐(关节位置未改变)。较大的值求解得更快,但会导致关节定位中有更多的间隙。 误差减少量—设置决定关节位置求解速度的因子。较大的值会导致解算器以较少的步骤将关节拉在一起,但过高的值会导致不稳定。 最大迭代次数—设置每个时间步长的最大迭代次数,求解器使用该次数求解关节的位置,并使其所有位置都在公差范围内。较大的值会让求解器有更多的时间将大量关节放置到位,但求解可能需要更长的时间。 粘着力—设置碰撞体之间的结合力,以抵消碰撞引起的排斥力。 |
|
运行时控制选项 |
|
|
部件设置 显示多个零件时,这些设置仅适用于工作零件。 |
|
|
刷新精度( % ) |
指定查看器中值的刷新率,以确定是否更新UI中的属性值。 |
|
步长 |
指定查看器的步长,指定仿真期间采样点的时间间隔。 |
|
会话设置 当显示多个零件时,这些设置适用于整个仿真。 |
|
|
默认缩放因子 |
指定仿真的显示速率。 |
|
单步前进时间 |
指定仿真的时间增量,单步前进中仿真进行的时间量。 |
|
协同仿真选项 |
|
|
使用时间同步 |
同步MCD信号的PLCSIM Adv信号 PLCSIM Adv处于冻结模式。MCD比较仿真时间并和PLCSIM Adv保持同步。 |
|
启用SIMIT控制服务 |
设置运行启动SIMIT协同仿真。 |
|
主导程序 |
指定MCD或SIMIT控制哪个是仿真主导软件。 |
|
激活时间同步 |
当主机设置为MCD时可用。设置同步时间以设置数据传输间隔。 |
|
序列编辑器选项 |
|
|
导出后调用时序图 |
允许导出后打开时序文件。 |
|
系统导航选项 |
|
|
仅适用于集成到Teamcenter的NX。 |
|
|
保存时加载 |
设置加载选项。 |
|
选择修订规则 |
从Teamcenter加载模型时,将修订规则设置为。 |
 该公众号主要介绍工业仿真软件及虚拟调试技术,欢迎各位小伙伴们关注。
该公众号主要介绍工业仿真软件及虚拟调试技术,欢迎各位小伙伴们关注。
以上是关于机电一体化毕业论文写某产品虚拟样机方面的,可以吗?的主要内容,如果未能解决你的问题,请参考以下文章