仿人机器人的实时模仿(基于Kinect)
Posted 朱铭德
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了仿人机器人的实时模仿(基于Kinect)相关的知识,希望对你有一定的参考价值。
在实验室想写篇博客又没啥特别想做的,就把15年本科毕业设计的东西稍微整理下。
//愿机器人早日一统天下!
惯例先放上效果:
//做这个东西的时候对MFC还一无所知,那时多亏机油帮忙搭了框架,多线程显示,MFC显示图片,Nao SDK落后各种小问题不一而足。
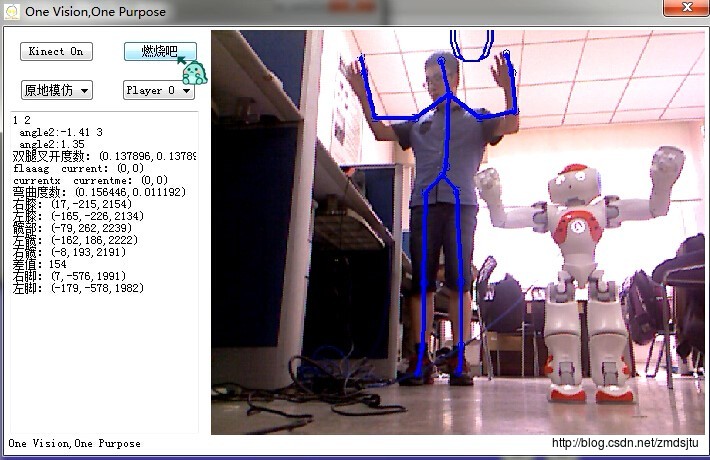
上半身以及部分简单腿部动作的实时模仿:

跨步的模仿:

当时用的还是Kinect1,仿人机器人是四代的Nao,实现流程图如下:
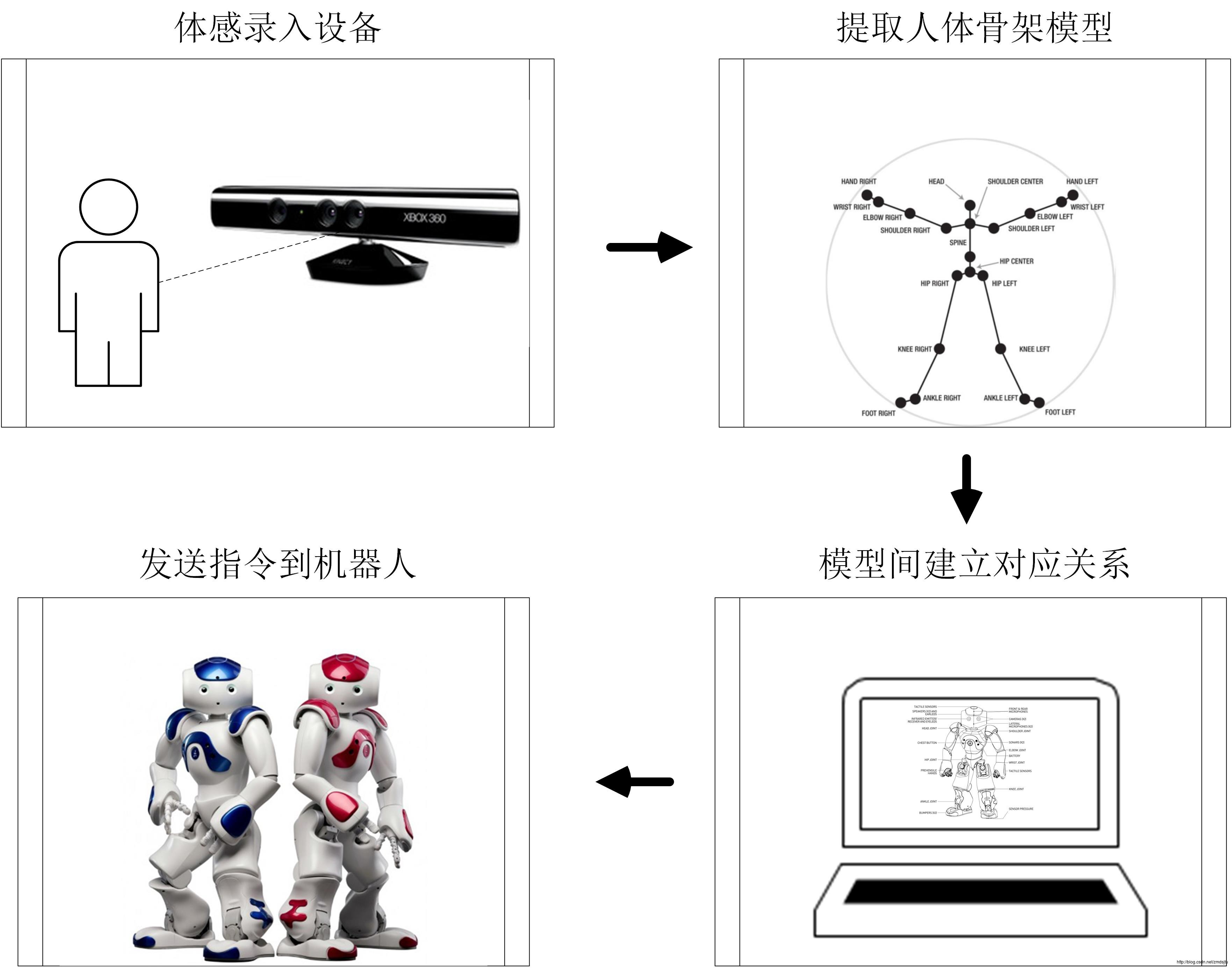
关键其实是模型对应关系的建立。
首先,为了方便调用对微软的骨骼模型进行编号。本文之前也介绍过,这种模型人体总计有20个关节,之后不加说明的Xi,Yi,Zi便是指的相应i序号的关节节点对应于Kinect坐标系里的人体骨骼模型的三维坐标信息。例如X3,Y3,Z3指的就是头部相对于Kinect的X轴,Y轴,Z轴方向的数值大小。

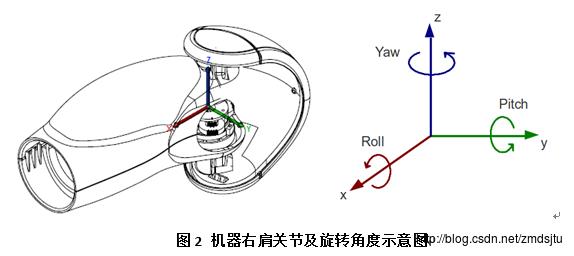
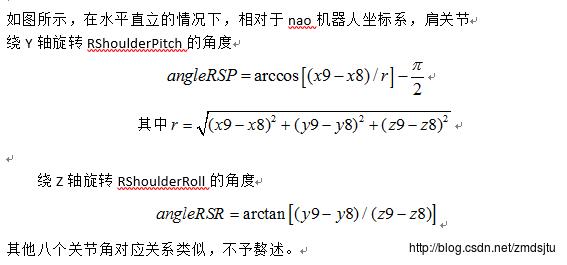
这里假定一个前提,机器人的上半身是处于水平直立。
以右胳膊为例,先考虑右肩关节——Nao机器人拥有前后旋转以及左右摆动两个自由度,对应于骨骼模型时需要用到骨骼参数里的肩关节点以及肘关节点的两个三围坐标。
祝大家头发浓密~
当然,最重要的,情人节快乐~

以上是关于仿人机器人的实时模仿(基于Kinect)的主要内容,如果未能解决你的问题,请参考以下文章
基于Ubuntu 16.04,手持Kinect v2,实时跑通ORB_SLAM2
基于Kinect深度图像采集和SLAM室内地图创建算法的matlab仿真